Station RoboDK
Une fois que la trajectoire du robot est prête dans RoboDK, nous devons nous assurer que la cellule virtuelle du robot correspond à la configuration réelle. Dans RoboDK, nous nous assurons que nous utilisons l'outil et le système de coordonnées corrects pour l'opération de fabrication avant de générer le programme du robot.
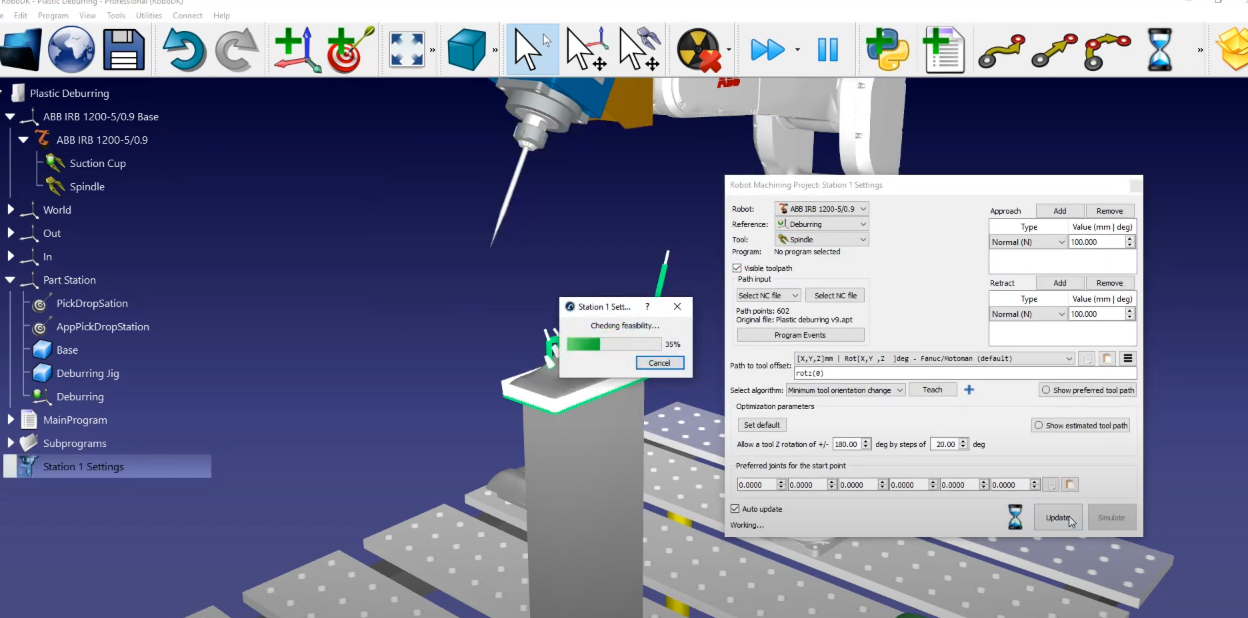
Dans cet exemple, nous avons sélectionné la référence Ebavurage et l'outil Broche. Sélectionnez Mise à jour➔ Simuler.
Si vous souhaitez réorganiser ou changer le sens d'une section de parcours, procédez comme suit :
1.Les projets de la FAO sont généralement déjà accompagnés de leurs mouvements d'approche et de rétraction, nous pouvons donc supprimer les nôtres : Il suffit d'aller sur "Approche" et "Rétraction" et de sélectionner Supprimer. Sélectionnez Mettre à jour, puis Simuler.
2.Dans cet exemple, les paramètres par défaut produisent un résultat valide. Le seul paramètre supplémentaire que nous pourrions vouloir modifier est l'activation et la désactivation de la broche : Ouvrez le programme Événements➔ Ajoutez un sous-programme dans "Approche du parcours" et "Retrait du parcours" en cochant chaque option et écrivez "Broche (1)" dans Approche du parcours et "Broche (0)" dans Retrait du parcours. Cela suppose que vous avez une fonction définie dans le contrôleur qui peut accepter un paramètre pour activer ou désactiver la broche.
3.Sélectionnez Mise à jour.
Nous devons maintenant modifier le nom du programme que nous avons créé "Station 1" et lancer le "Programme principal"
La dernière chose à faire est de générer le programme du robot. Comme nous utilisons un robot ABB, nous devons exporter un fichier mod pour le contrôleur de robot ABB qui utilise le langage de programmation RAPID d'ABB.
1.Assurez-vous que nous utilisons le bon post-processeur : Sélectionnez la station➔ Sélectionnez le post-processeur➔ ABB RAPID IRC 5.
2.Cliquez avec le bouton droit de la souris sur le programme Station1 et sélectionnez Generate Robot Program.
Vous devriez voir automatiquement le programme du robot dans un éditeur de texte. Vous pourrez voir toutes les commandes de déplacement spécifiques et la syntaxe requise par le contrôleur de robot ABB.