Deburring
Introduction
L'ébavurage robotisé du plastique consiste en un bras robotisé qui enlève l'excès de matière des pièces moulées en plastique. Cet exemple vous aidera à créer un projet dans RoboDK pour la simulation du robot et la programmation hors ligne. Cet exemple montre également comment vous pouvez utiliser le plugin Fusion 360 pour générer des parcours d'outils dans RoboDK.
Avec le plug-in RoboDK pour Fusion 360, vous pouvez facilement créer un projet d'usinage et exporter automatiquement le parcours généré dans RoboDK. RoboDK le transformera ensuite en programme de robot. Vous pouvez facilement charger des modèles 3D créés dans SolidWorks dans RoboDK. L'Add-in RoboDK vous permet de programmer n'importe quel bras de robot directement à partir de Fusion 360 pour n'importe quelle application de fabrication.
Exemple d'ébavurage de plastique
Pour démarrer le projet, vous devrez d'abord sélectionner l'exemple d'ébavurage de plastique de RoboDK dans la bibliothèque par défaut.
Setup
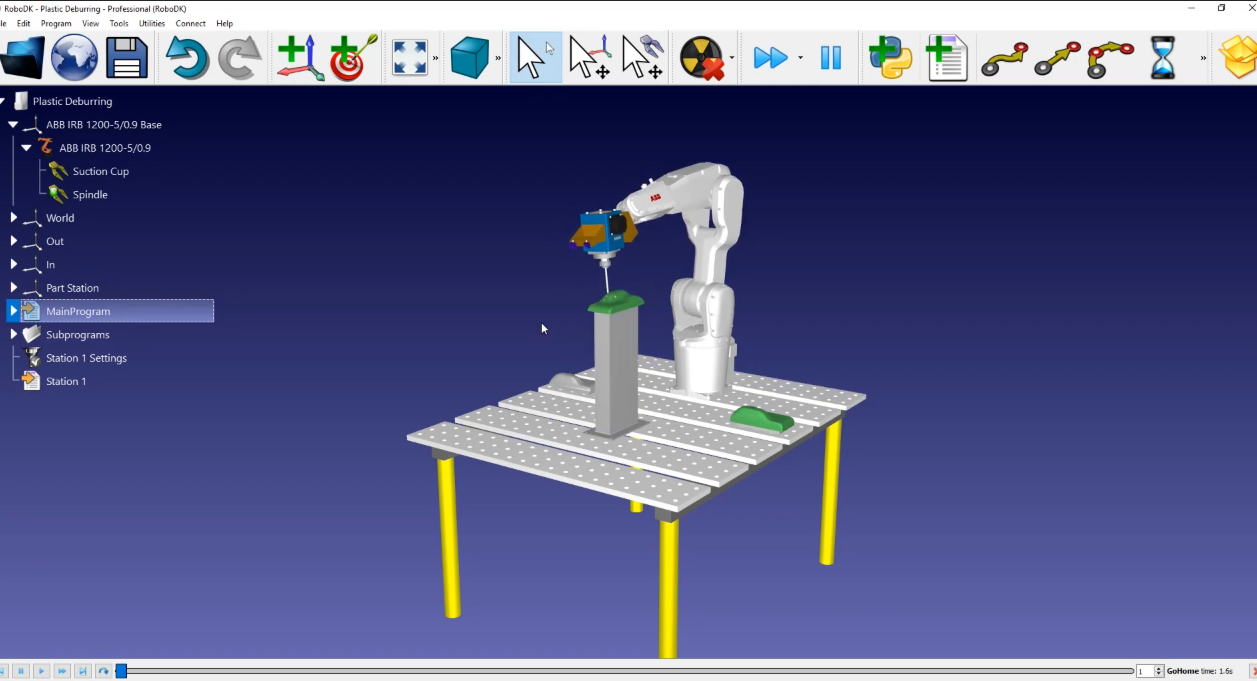
Cet exemple utilise une installation simple : Un robot monté sur une table (cet exemple inclut un robot ABB), une pile pour la pièce fraîchement moulée, une pile pour la pièce traitée, et le gabarit au milieu pour maintenir la pièce en place
Chargez la station :
1.Sélectionnez File ➔
2.Localisez l'exemple Plastic Deburring dans la section des exemples de RoboDK :
C:/RoboDK/Examples/Plugin-Fusion360-Plastic-Deburring.rdk.
Maintenant que vous avez chargé la station, vous pouvez ouvrir Fusion 360.
Esquisse 2D à partir de Fusion 360
Ouvrez votre objet dans Fusion 360. Dans cet exemple, l'objet est une pièce en plastique. L'objectif de ce projet est d'enlever l'excès de matière dans les trois trous, et tout autour de la pièce près du bas de celle-ci.
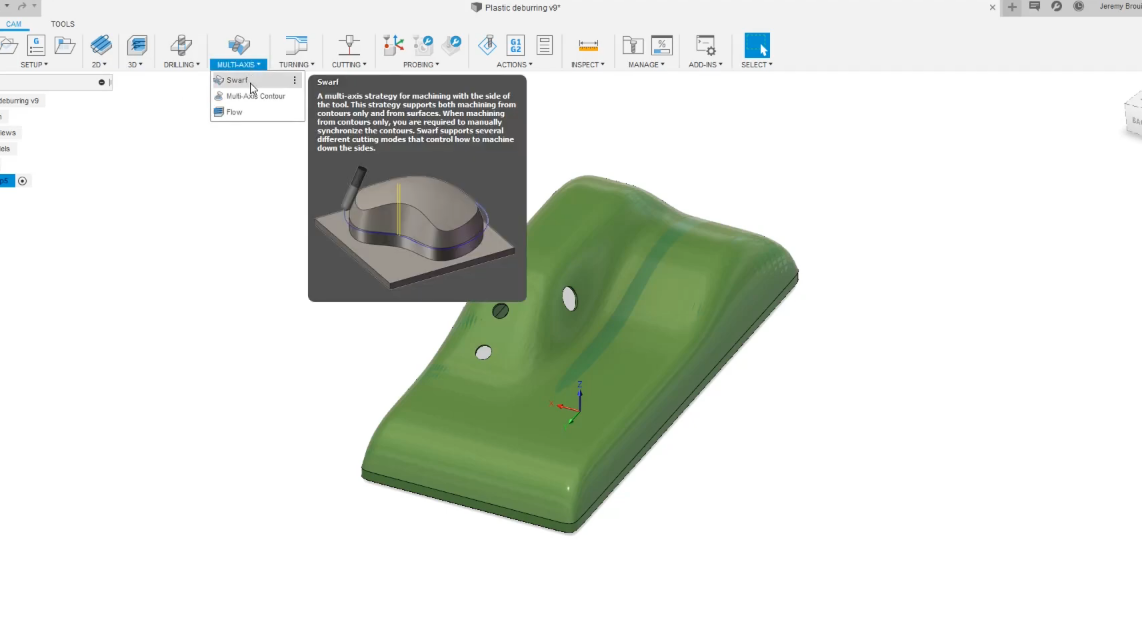
Tout d'abord, vous devez vous assurer que vous êtes dans l'espace de travail "Fabrication" de Fusion. Nous devons suivre les étapes suivantes pour créer le parcours de l'outil :
1.Sélectionnez Multi-Axis, puis l'outil Swarf.
2.Sélectionnez l'outil que vous souhaitez utiliser (dans cet exemple, nous utiliserons un outil personnalisé de notre station RoboDK), puis sélectionnez le trou pour créer le premier parcours.
3.Pour obtenir le parcours de l'outil sur le côté droit de la surface, nous allons sélectionner Usiner l'autre côté, puis Ok. Suivez cette procédure pour chaque trou.
4.Pour faire la même chose avec la partie inférieure, vous sélectionnerez l'outil Copeaux, puis la partie inférieure.
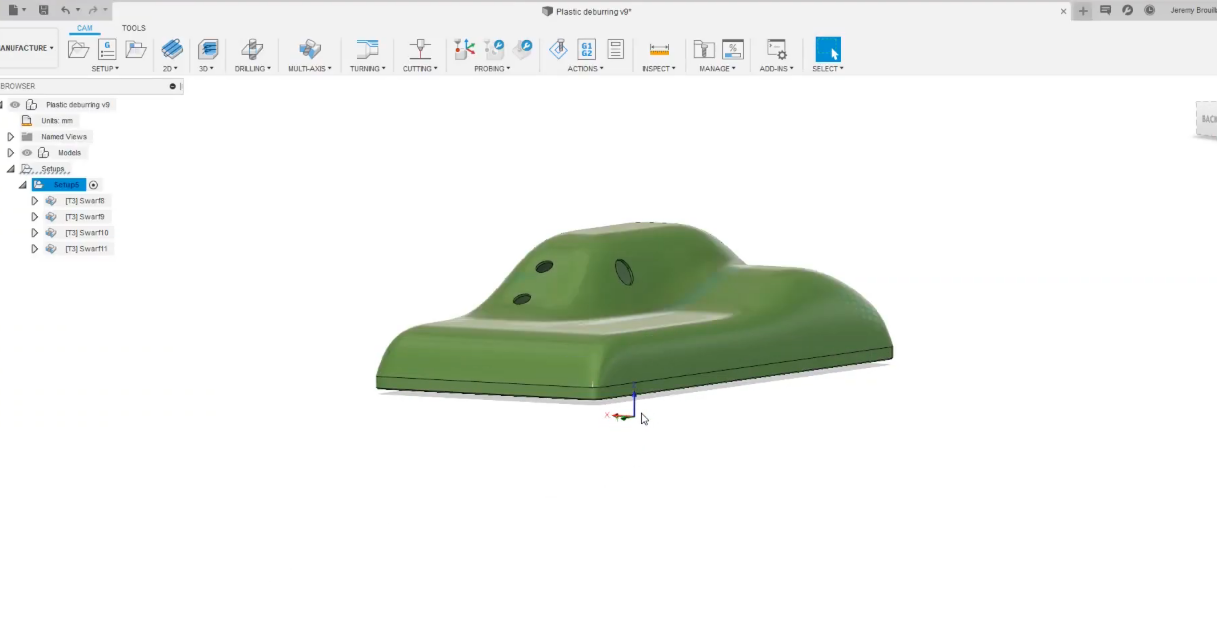
5.Une fois le calcul effectué, nous allons simuler les parcours que nous venons de créer : Sélectionnez votre configuration, puis Simuler.
Vous disposerez d'un parcours d'outil complet pour votre robot. Nous devons retourner dans RoboDK pour nous assurer que le système de coordonnées "Ebavurage" est activé. Pour ce faire, nous devons
Allez dans RoboDK : sélectionnez Deburring (ébavurage), puis Activate Reference Frame (activation du système de coordonnées).
Maintenant que le système de coordonnées de l'ébavurage est activé, le programme sera exporté par rapport à ce système de coordonnées. Nous allons retourner dans Fusion 360 et vérifier que l'image est telle qu'elle est montrée :
Suivez ces étapes pour charger votre esquisse dans RoboDK :
1.Dans Fusion 360, vous disposez du plugin RoboDK. Il vous suffit de sélectionner Charger le projet FAO dans RoboDK
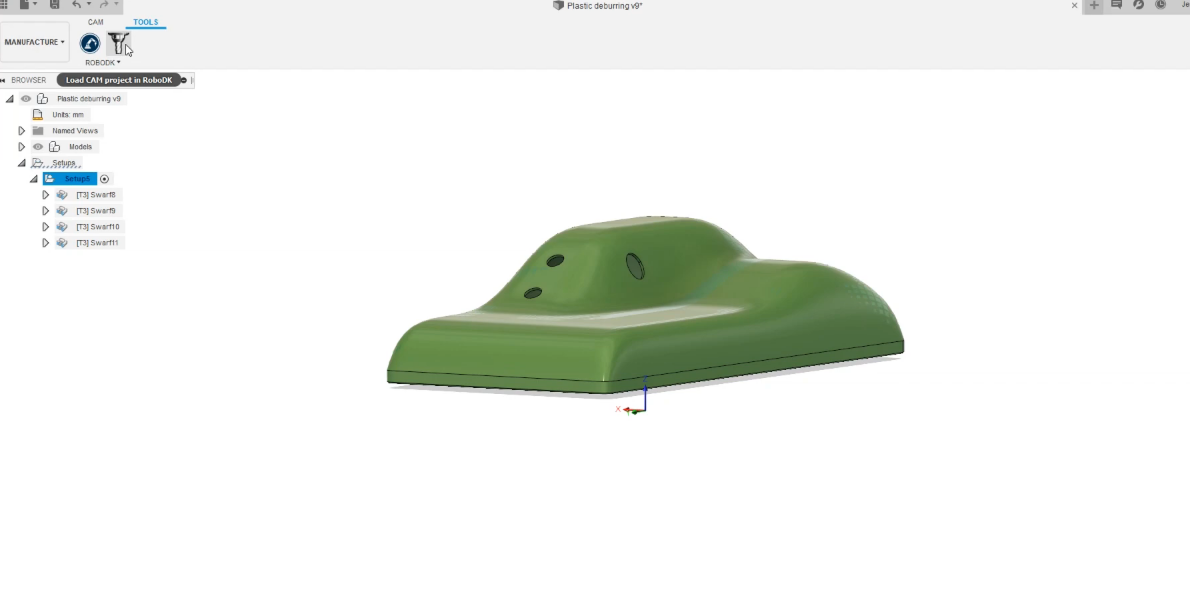
2.Si nous retournons dans RoboDK, nous pouvons retrouver le parcours de coupe à sa place. Un "Projet d'usinage" appelé "Ébarbage plastique" a été créé : Sélectionnez Ébavurage, puis Visible.
3.Nous pouvons renommer le parcours de coupe en "Station1 Settings" : Cliquez avec le bouton droit de la souris sur Ébarbage plastique pour le renommer.
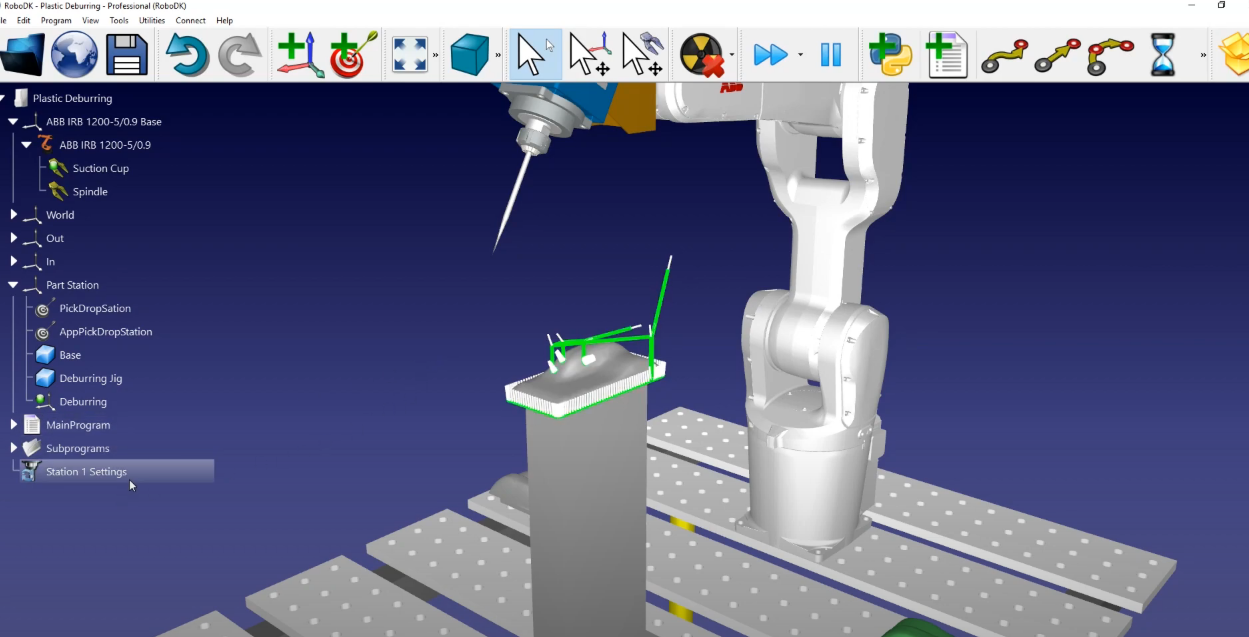
Station RoboDK
Une fois que la trajectoire du robot est prête dans RoboDK, nous devons nous assurer que la cellule virtuelle du robot correspond à la configuration réelle. Dans RoboDK, nous nous assurons que nous utilisons l'outil et le système de coordonnées corrects pour l'opération de fabrication avant de générer le programme du robot.
Dans cet exemple, nous avons sélectionné la référence Ebavurage et l'outil Broche. Sélectionnez Mise à jour➔ Simuler.
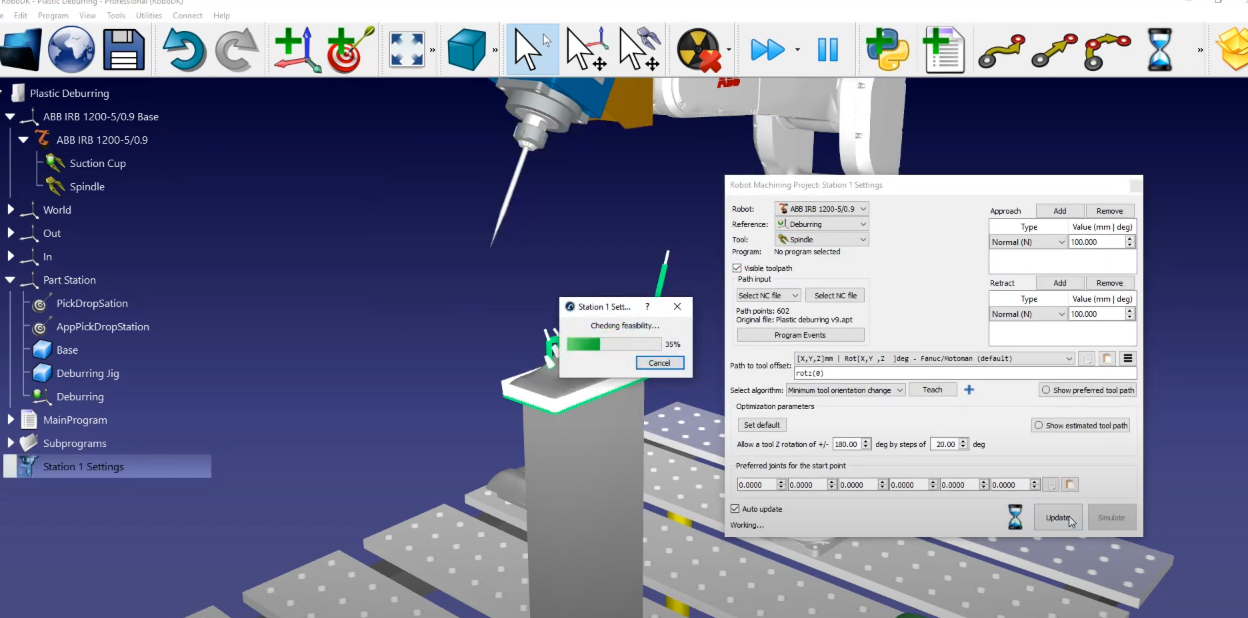
Si vous souhaitez réorganiser ou changer le sens d'une section de parcours, procédez comme suit :
1.Les projets de la FAO sont généralement déjà accompagnés de leurs mouvements d'approche et de rétraction, nous pouvons donc supprimer les nôtres : Il suffit d'aller sur "Approche" et "Rétraction" et de sélectionner Supprimer. Sélectionnez Mettre à jour, puis Simuler.
2.Dans cet exemple, les paramètres par défaut produisent un résultat valide. Le seul paramètre supplémentaire que nous pourrions vouloir modifier est l'activation et la désactivation de la broche : Ouvrez le programme Événements➔ Ajoutez un sous-programme dans "Approche du parcours" et "Retrait du parcours" en cochant chaque option et écrivez "Broche (1)" dans Approche du parcours et "Broche (0)" dans Retrait du parcours. Cela suppose que vous avez une fonction définie dans le contrôleur qui peut accepter un paramètre pour activer ou désactiver la broche.
3.Sélectionnez Mise à jour.
Nous devons maintenant modifier le nom du programme que nous avons créé "Station 1" et lancer le "Programme principal"
La dernière chose à faire est de générer le programme du robot. Comme nous utilisons un robot ABB, nous devons exporter un fichier mod pour le contrôleur de robot ABB qui utilise le langage de programmation RAPID d'ABB.
1.Assurez-vous que nous utilisons le bon post-processeur : Sélectionnez la station➔ Sélectionnez le post-processeur➔ ABB RAPID IRC 5.
2.Cliquez avec le bouton droit de la souris sur le programme Station1 et sélectionnez Generate Robot Program.
Vous devriez voir automatiquement le programme du robot dans un éditeur de texte. Vous pourrez voir toutes les commandes de déplacement spécifiques et la syntaxe requise par le contrôleur de robot ABB.