Esquisse 3D dans Inventor
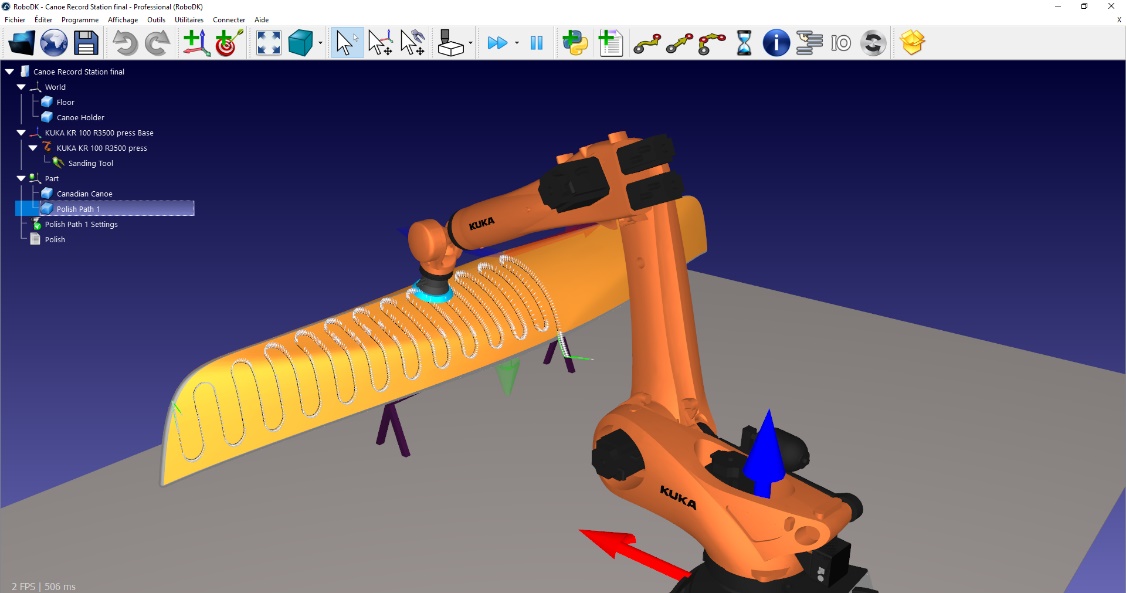
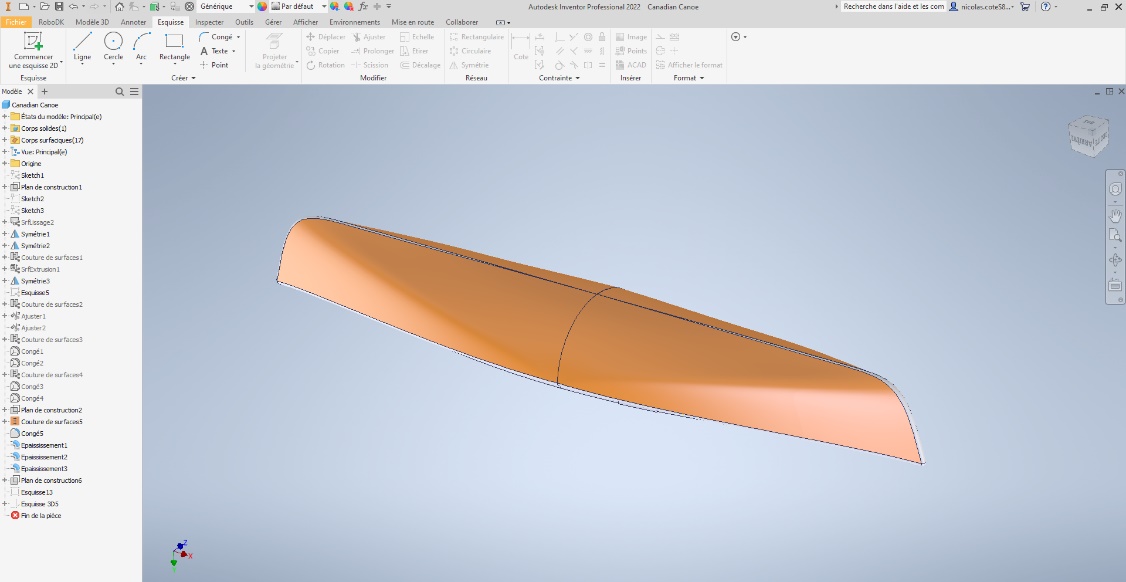
Ouvrir l’objet 3D dans Inventor. Dans cet exemple l’objet 3D est un canoë avec un extérieur courbe que l’on souhaite polir.
Le but du projet est de créer et d’importer un parcours d’outil pour le polissage sur une surface courbe. Le parcours consiste en un mouvement de haut en bas sur le côté du canoë.
Avant de créer le parcours outil vous devrez créer un plan de référence orienté à 45° par rapport à la pièce. Le plan permettra de créer un parcours d’outil en 2D qui sera ensuite projeté sur la surface 3D du canoë. Dans cet exemple, le plan est déjà créé dans l’arborescence, pour l’afficher, cliquer droit sur Plan de construction6➔Visibilité
Dans cet exemple, le parcours 2D a déjà été créé. Vous pouvez l’afficher en cliquant droit sur Sketch13➔Visibilité sur le menu de gauche tel qu’illustré sur l’image ici-bas.
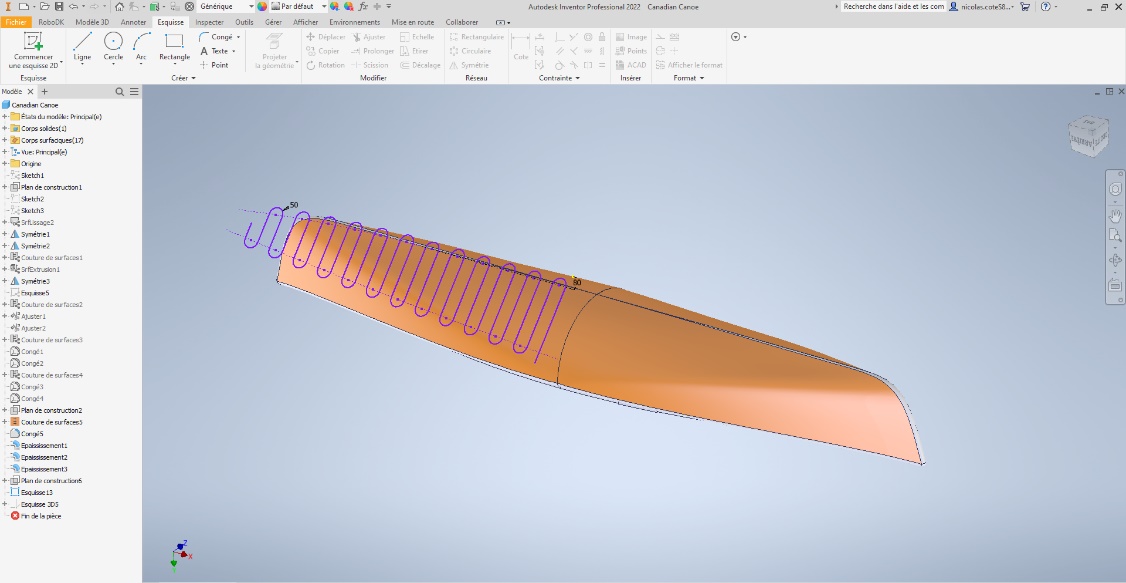
Comme vous pouvez voir, le parcours 2D couvre seulement une portion du canoë. Vous pouvez ouvrir l’esquisse et la modifier en cliquant droit sur Sketch13➔Modifier l’esquisse.
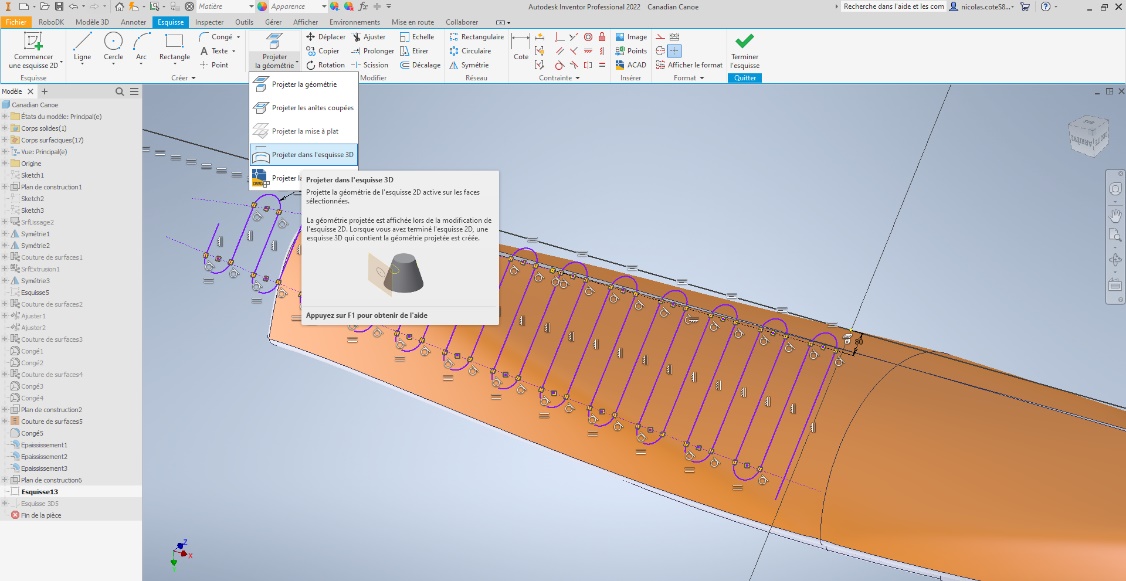
En utilisant les outils d’Inventor, il est maintenant possible de projeter le parcours 2D sur la surface courbe de la pièce :
1.Cliquer droit sur Sketch13➔Modifier l’esquisse.
2.Naviguer vers l’onglet Esquisse dans Inventor, sélectionner Projeter dans l’esquisse 3D
3.Cliquer sur le bouton Faces et sélectionner la surface 3D sur laquelle on souhaite projeter le parcours 2D.Une fois la surface sélectionnée, cliquer sur OK
4.Cliquer sur erminer l’esquisse.
5.Une esquisse 3D sera créée.
6.Dans cet exemple, l’Esquisse 3D5 a déjà été créée
Certaines des lignes créées dans l’esquisse 3D doivent être définies comme des lignes de construction:
1.Cliquer droit sur Esquisse 3D5➔Visibility afin d’afficher le parcours 3D.
2.Cliquer droit sur Esquisse 3D5➔Modifier l’esquisse 3D.
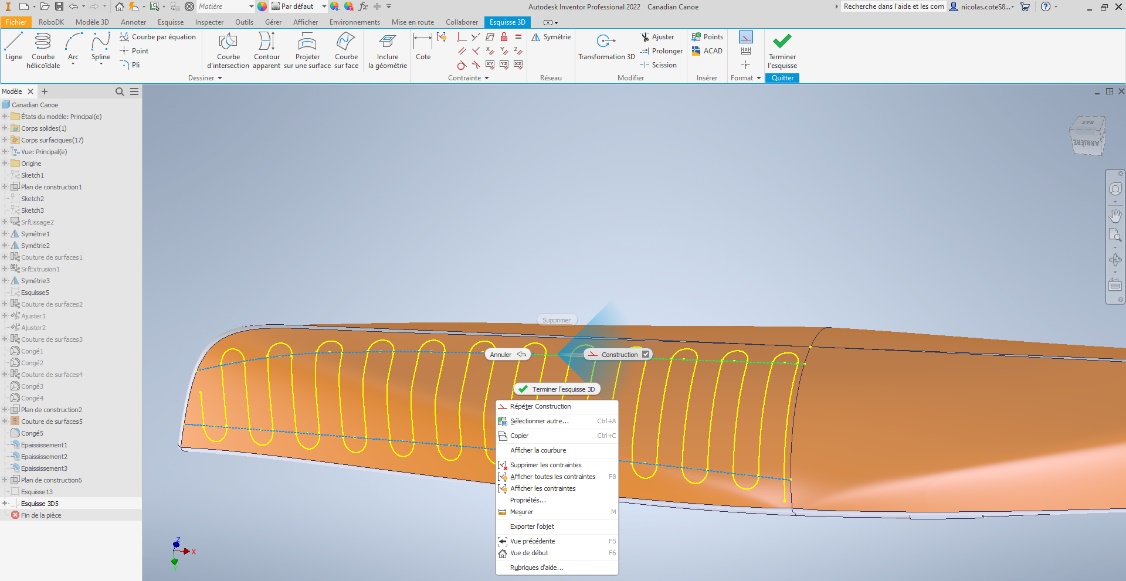
3.Sélectionner les lignes longitudinales qui servent à encrer les rayons dans l’esquisse 2D.
4.Cliquer droit et sélectionner Construction.
5.Cliquer sur Terminer l’esquisse.
Suivez les prochaines étapes pour importer le canoë dans RoboDK:
1.Naviguer vers l’onglet RoboDk dans Inventor et sélectionner 
2.Entrer le nom de l’objet, dans ce cas-ci nous allons l’appeler Canadian Canoe.
3.Entrer le nom de la référence par rapport à laquelle la pièce sera importée. Dans cet exemple, nous allons utiliser la référence Part telle que définie dans la cellule RoboDK de l’exemple. Si aucun nom de référence n’est entré, la pièce sera importée selon la référence active dans la cellule.
4.Fermer la fenêtre Settings ou appuyez sur OK.
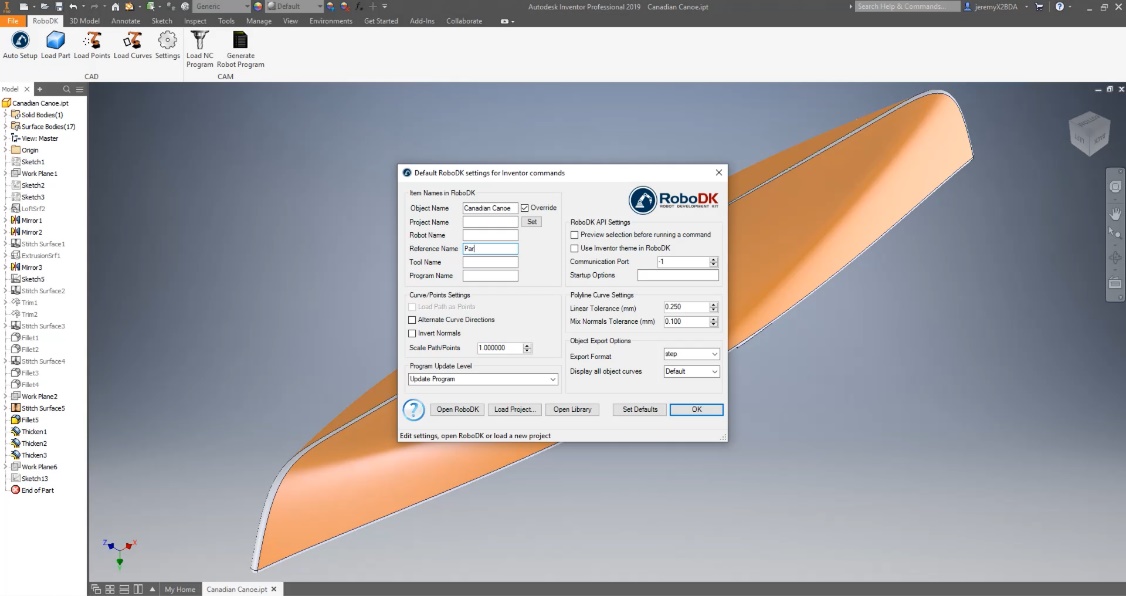
5.Cliquer sur Load Part
Suivez les prochaines étapes pour importer l’esquisse dans RoboDK:
1.Naviguer vers l’onglet RoboDK dans Inventor et sélectionner
2.Entrer le nom de l’objet, dans ce cas-ci nous allons l’appeler Polish Path 1.
3.Entrer le nom de la référence par rapport à laquelle la pièce sera importée. Dans cet exemple, nous allons utiliser la référence Part telle que définie dans la cellule RoboDK de l’exemple. Si aucun nom de référence n’est entré, la pièce sera importée selon la référence active dans la cellule.
4.Fermer la fenêtre Settings ou appuyez sur OK.
5.Sélectionner le bouton 
6.Sélectionner toutes les lignes du parcours 3D ainsi que la surface du canoë sur laquelle l’esquisse 3D est projetée. Cette étape est essentielle car elle permet à RoboDK de calculer la normale du parcours 3D par rapport à la surface du canoë. Ceci permettra d’orienter correctement l’outil de polissage par rapport à la surface courbée de la pièce.
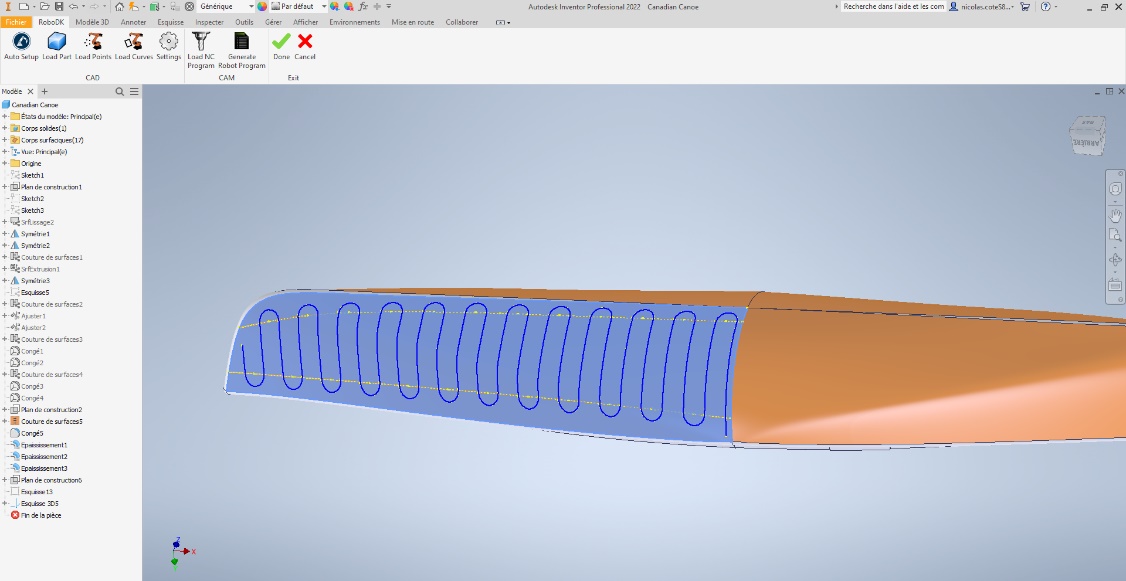
7.Sélectionner 
La pièce (Canadian Canoe) ainsi que le parcours 3D (Polish Path 1) seront importés sous la référence (Part).