La prochaine étape consiste à vérifier si les segments du parcours 3D sont exécutés dans le bon ordre. Pour ce faire, double cliquer sur Polish Path 1 Settings ➔ Mettre à jour ➔ Simuler. Dans cet exemple, l’ordre sera ajusté.
Note : Pour un projet avec une trajectoire complexe comme le présent exemple, il est recommandé de ne pas sélectionner l’option Mise à jour automatique dans le menu Polish Path 1 Settings afin de ne pas recalculer automatiquement le parcours robot à la suite de chaque petit changement. Le parcours robot devra être mis à jour manuellement en cliquant sur le bouton Mettre à jour.
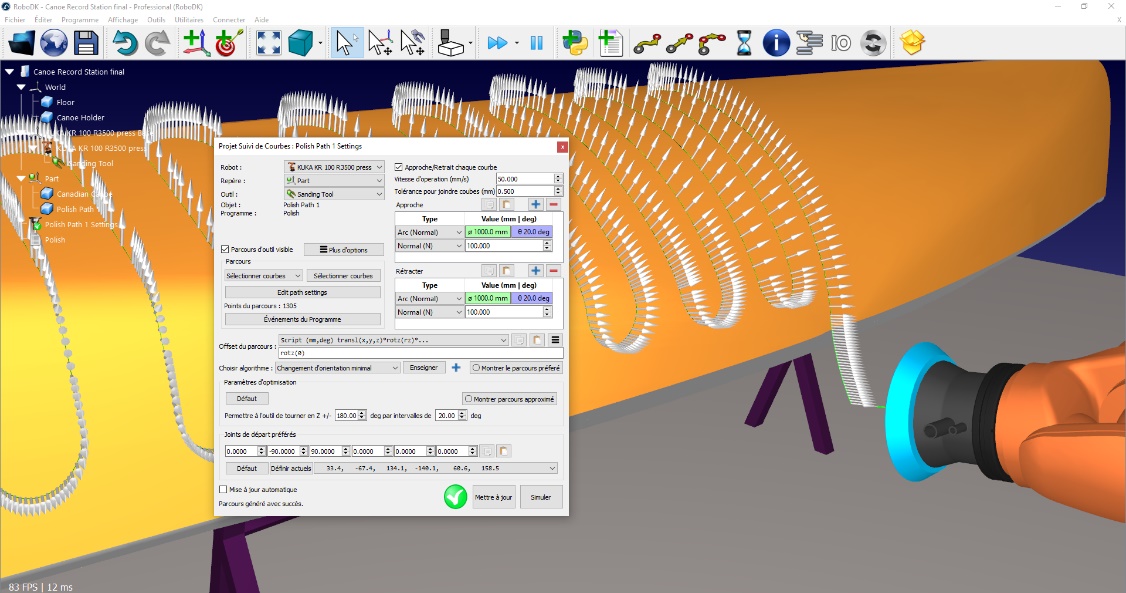
Des petites flèches blanches sont visibles sortant du parcours et perpendiculaires à la surface du canoë. Les petites lignes blanches correspondent aux normales du parcours par rapport à la surface du canoë.
Pour ajuster la direction du parcours :
1.Sélectionner Polish Path 1 Settings.
2.Cliquer sur Sélectionner courbes.
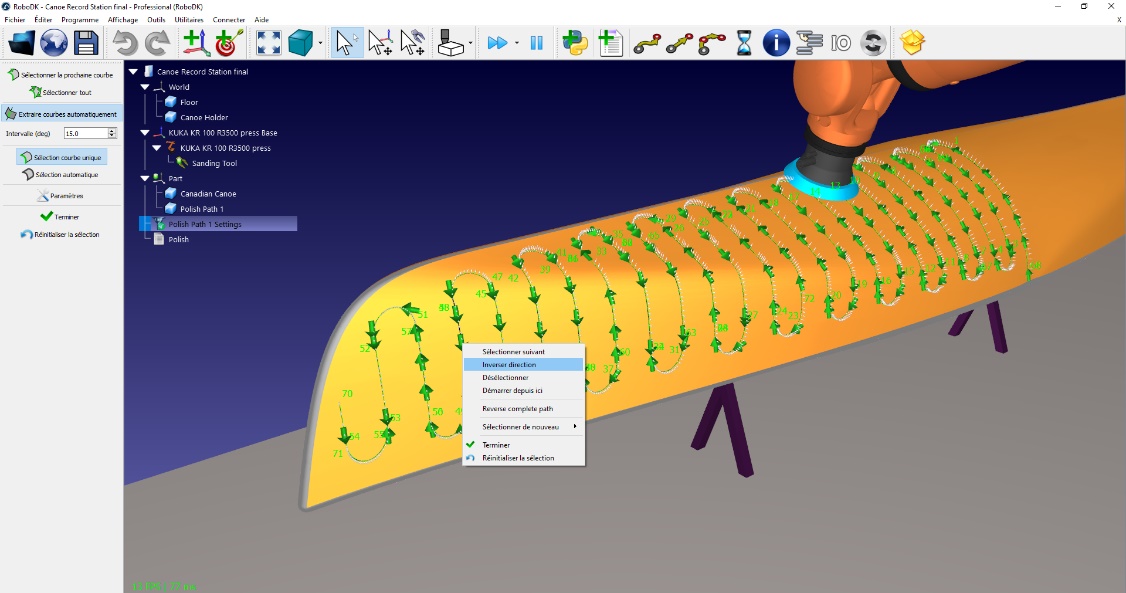
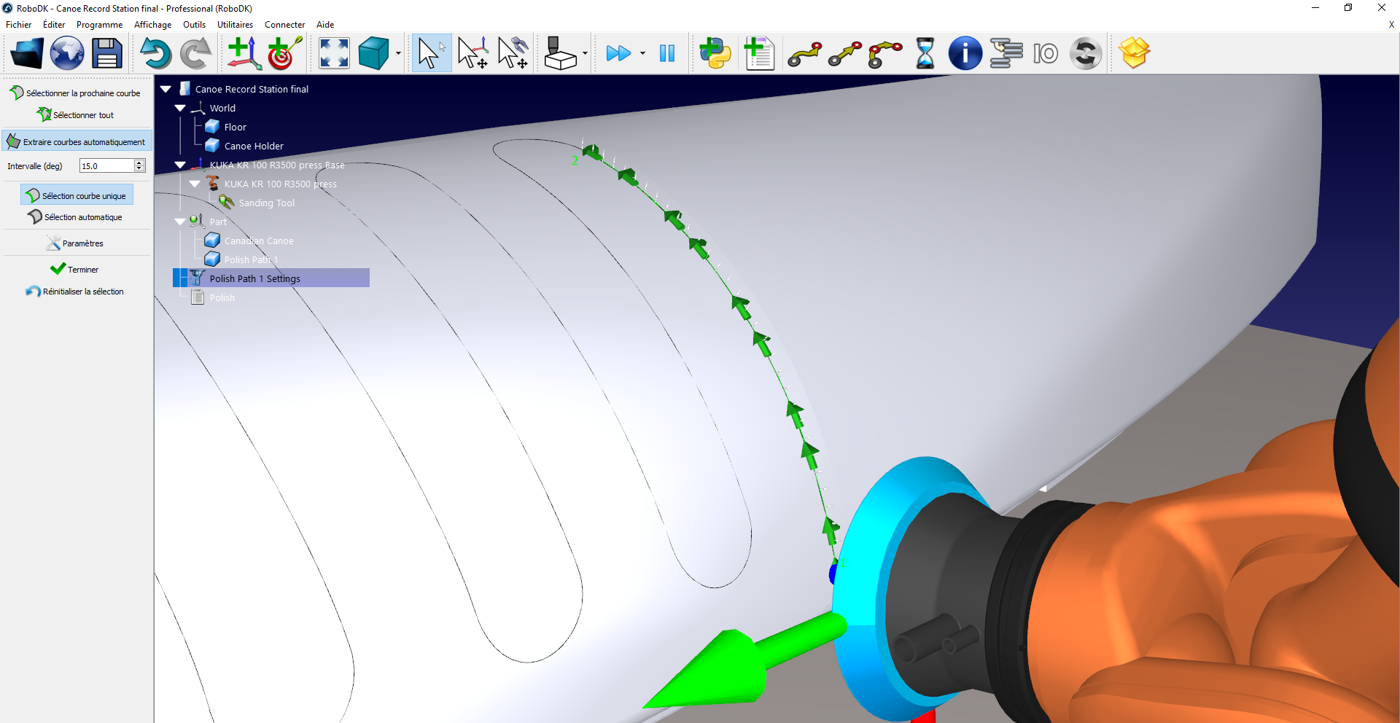
Un menu apparaitra à gauche de l’écran. Les courbes sélectionnées sont affichées en surbrillance verte, une flèche indique la direction de déplacement. Le début et la fin de chaque segment de courbe est numéroté. Le sens des flèches et les numéros des courbes correspondent à l’ordre et la direction de déplacement que le robot empruntera pour chaque segment de courbe.
Dans la photo ici-haut, l’ordre des courbes et la direction de déplacement n’est pas bonne, le parcours devra être refait:
1.Cliquer sur Réinitialiser la sélection dans le menu à gauche
2.Sélectionner le segment de courbe souhaité pour le départ du parcours. Nous allons sélectionner le premier segment droit, au centre du canoë.
3.Il est important que le segment de courbe sélectionné pour le départ pointe dans la bonne direction.
a.Pour inverser la direction de déplacement d’un segment de courbe spécifique, cliquer sur le segment une seconde fois ou cliquer droit sur le segment sélectionner Inverser direction.
b.Pour annuler la sélection d’un segment spécifique, cliquer une troisième fois sur le segment ou cliquer droit sur le segment et sélectionner Désélectionner
4.Une fois le premier segment de courbe sélectionné et dans la bonne direction, le bouton Sélectionner la prochaine courbe permettra de sélectionner un à un les segments de courbe suivants selon la même direction de déplacement. Le bouton Sélectionner tout permet de sélectionner toutes les courbes dans l’ordre.
5.Une fois que la courbe est sélectionnée au complet, cliquer sur Terminer
La station peut maintenant être mise à jour en cliquant sur le bouton Mise à jour et simulée en cliquant sur Simuler.
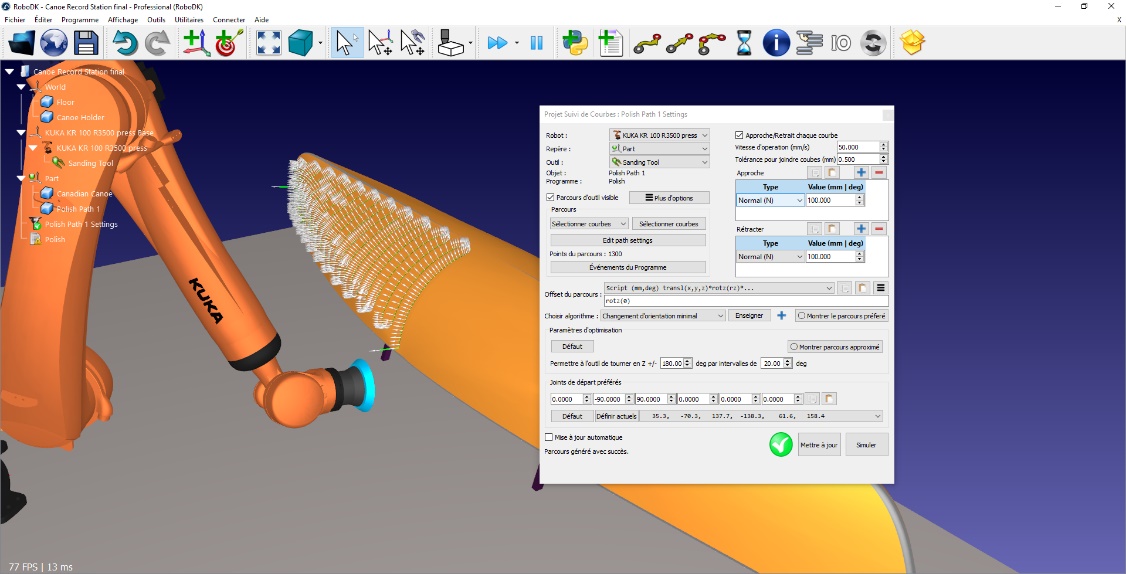
Note : Par défaut, l’approche utilisée dans la démo est une approche de 100 mm normale à la trajectoire. Une approche normale veut dire que le robot fera son approche perpendiculairement à la surface à polir. Une approche Arc (Normal) de rayon 1000 mm et d’angle de 20° permettra une amorce graduelle de la polisseuse sur la surface du canoë. Une combinaison de stratégies d’approches peuvent-être utilisées. Ici la stratégie Arc (Normal) est combinée avec une approche Normal de 200 mm afin d’éviter une collision entre le robot et le canoë. La même stratégie peut être employée pour la sortie.
La vitesse de polissage peut être modifiée Vitesse d’opération (mm/s). une vitesse de 50 mm/s sera utilisée pour l’exemple.
Astuce : Naviguer vers Polish Path 1 Settings ➔ Événements du programme afin de gérer plusieurs paramètres en lien avec le parcours robot.
Astuce : Dans le menu Événements du programme, la vitesse d’approche et de retrait peut être modifiée dans la case Mouvement rapide (mm/s). Une vitesse de 200 mm/s peut être entrée.
Astuce : Chaque courbe est approximée en une série de lignes. Les lignes sont définies entre deux points, chaque flèche blanche correspond à un point. Par défaut le contrôleur robot fera un arrêt à chaque point avant de passer au point suivant. Pour une opération de polissage, cette action n’est pas idéale. Dans le menu Événements du programme, l’option Set Rounding (mm or %) peut être cochée afin d’activer l’option du mouvement continu dans le contrôleur du robot. Tout dépendant du robot et de la marque du robot cette option peut prendre différents noms : «Blending radius, zone data, CNT». Nous allons mettre cette valeur à 0,5mm.
Astuce : Dans le menu Événements du programme, vous pouvez gérer les activations des sorties (Par exemple : si vous souhaitez activer la polisseuse durant l’approche de l’outil ou lorsque l’outil est sur le début du parcours)
Pour géner un vrai programme robot, un fichier .src devra être créé pour être lu par un contrôleur KRC :
1.Cliquer droit sur Polish ➔ Sélectionner post processeur. Dans cet exemple, sélectionner l’option KUKA KRC4.
2.Sélectionner OK.
3.Cliquer droit sur Polish ➔ Générer programme robot ou appuyer sur F6. Un éditeur de texte apparaitera avec le fichier .src qui pourra ensuite être envoyé au robot.