Soudage par points
Le soudage par points est l'une des tâches les plus courantes nécessitant l'utilisation d'un logiciel de simulation de robot. Ce guide vous montre comment simuler et programmer un robot pour le soudage par points automatisé de panneaux de carrosserie.
Vous pouvez trouver l'exemple disponible dans notre bibliothèque d'exemples : Lien vers le poste de soudure par points.
Exigences
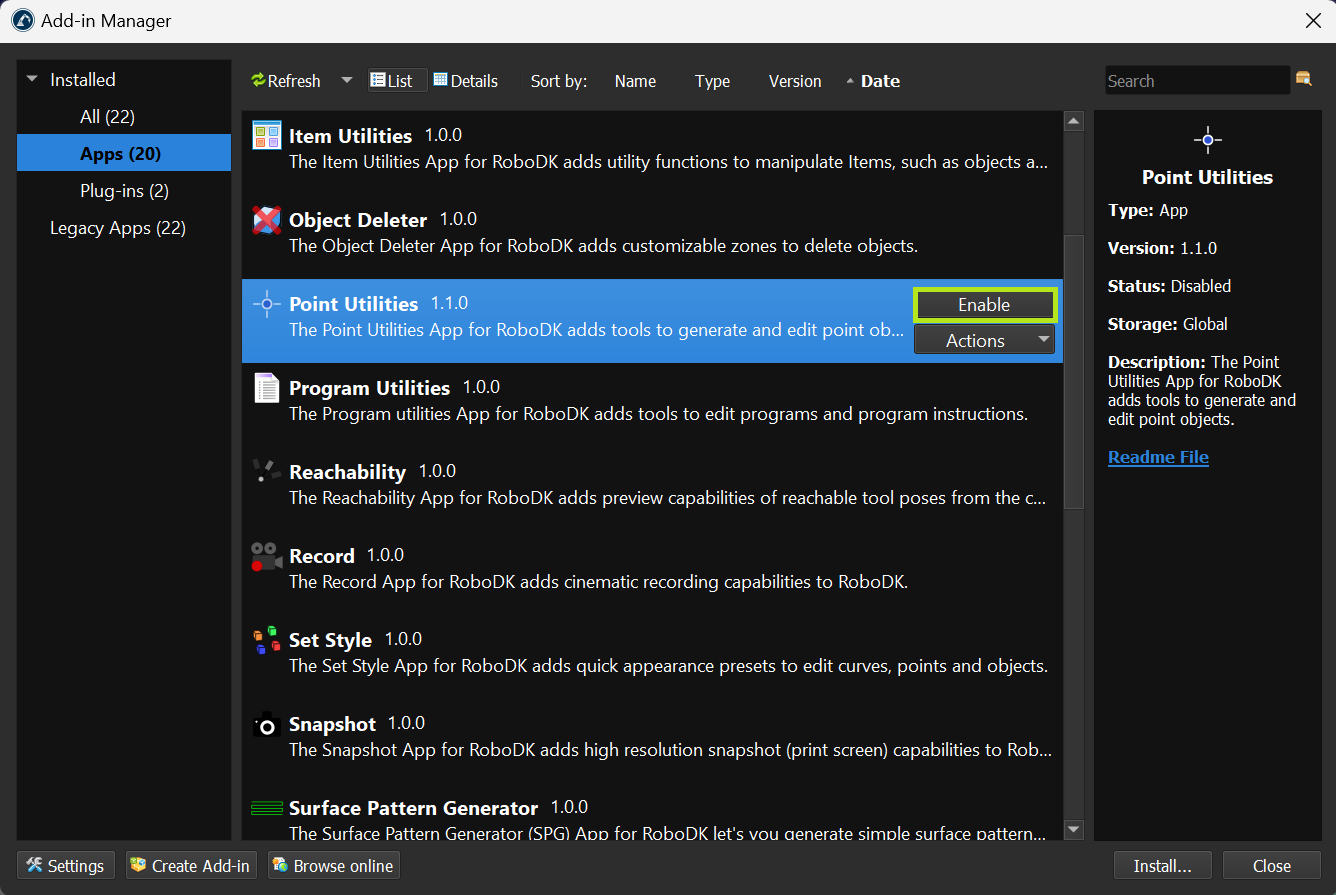
Vous devez utiliser RoboDK v5.5.4 ou une version ultérieure pour créer correctement l'exemple de soudage par points. Cette version de RoboDK comprend les utilitaires de point et l'Add-in de forme qui facilitent la création du projet de soudage par points.
Workflow
Cette section vous guidera pour créer une simulation de soudage par points incluant la génération automatique d'un parcours sans collision à l'aide du plugin Collision Free Planner.
Cette section décompose le processus de création du projet de soudage par points en plusieurs étapes :
1.Chargez tous les modèles, robots et outils nécessaires.
2.Configurer l'outil (CDO).
3.Créez des objectifs.
4.Créer et vérifier les parcours/trajectoires des robots.
5.Analysez le parcours.
6.Organisez le déroulement du programme.
7.Générer des programmes de robots.
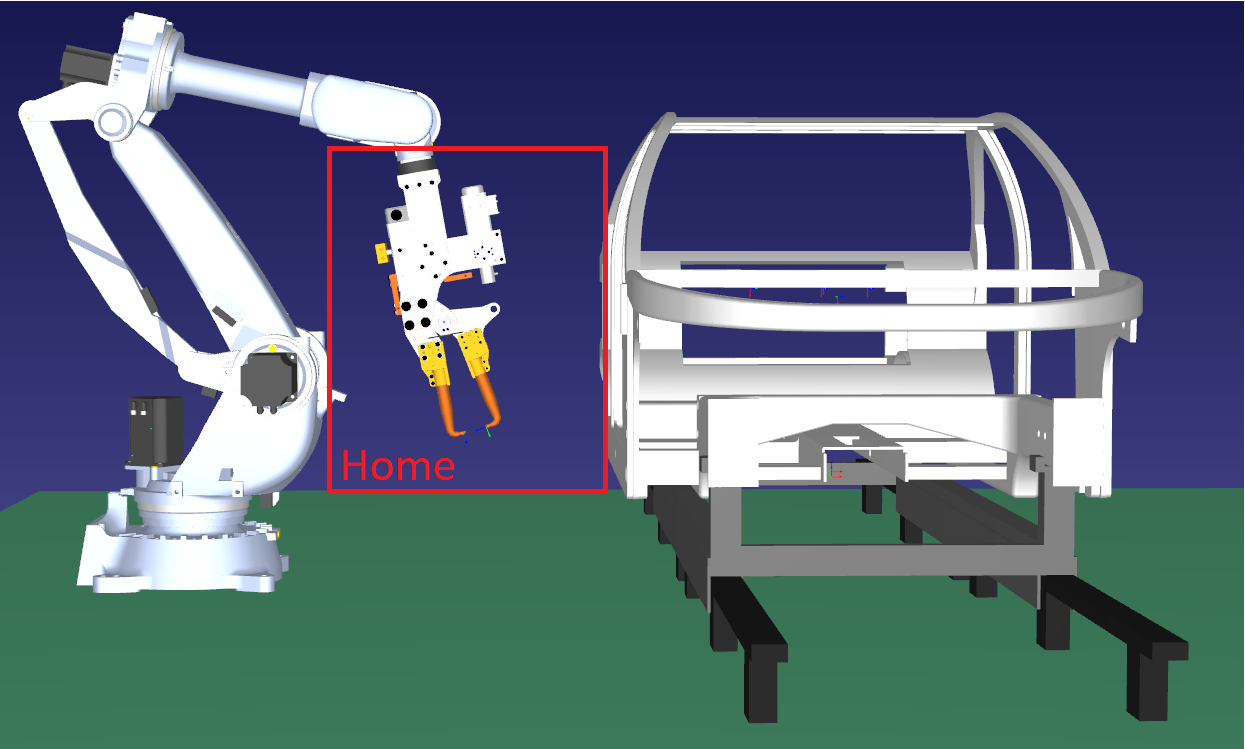
Composants de la station
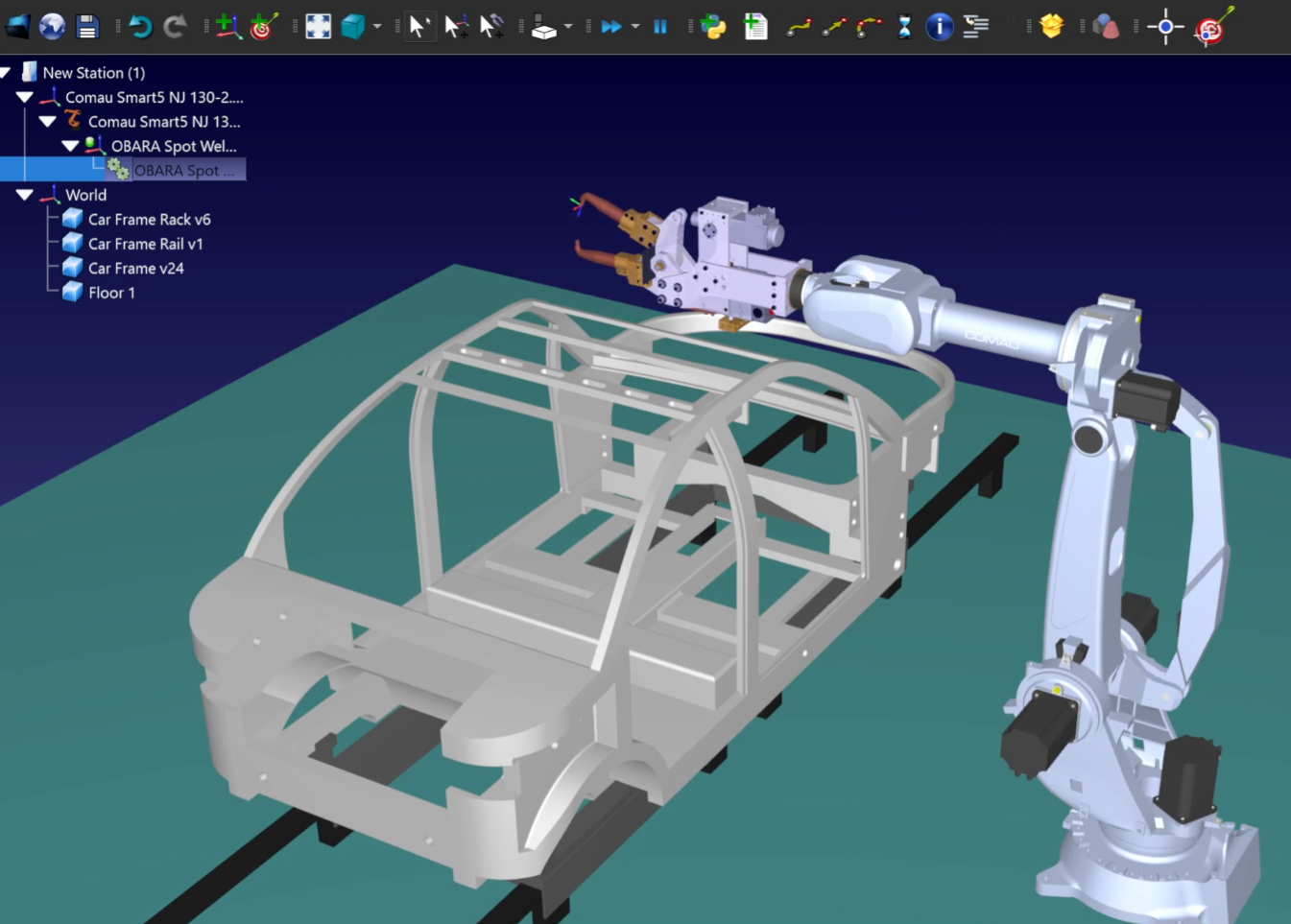
Vous devez d'abord charger un robot et un pistolet de soudage par points comme outil du robot.
Vous pouvez utiliser les composants suivants de la bibliothèque en ligne de RoboDK :
1.Robot : Comau Smart5 NJ 130-2.6
2.Outil : Pistolet de soudage par points OBARA
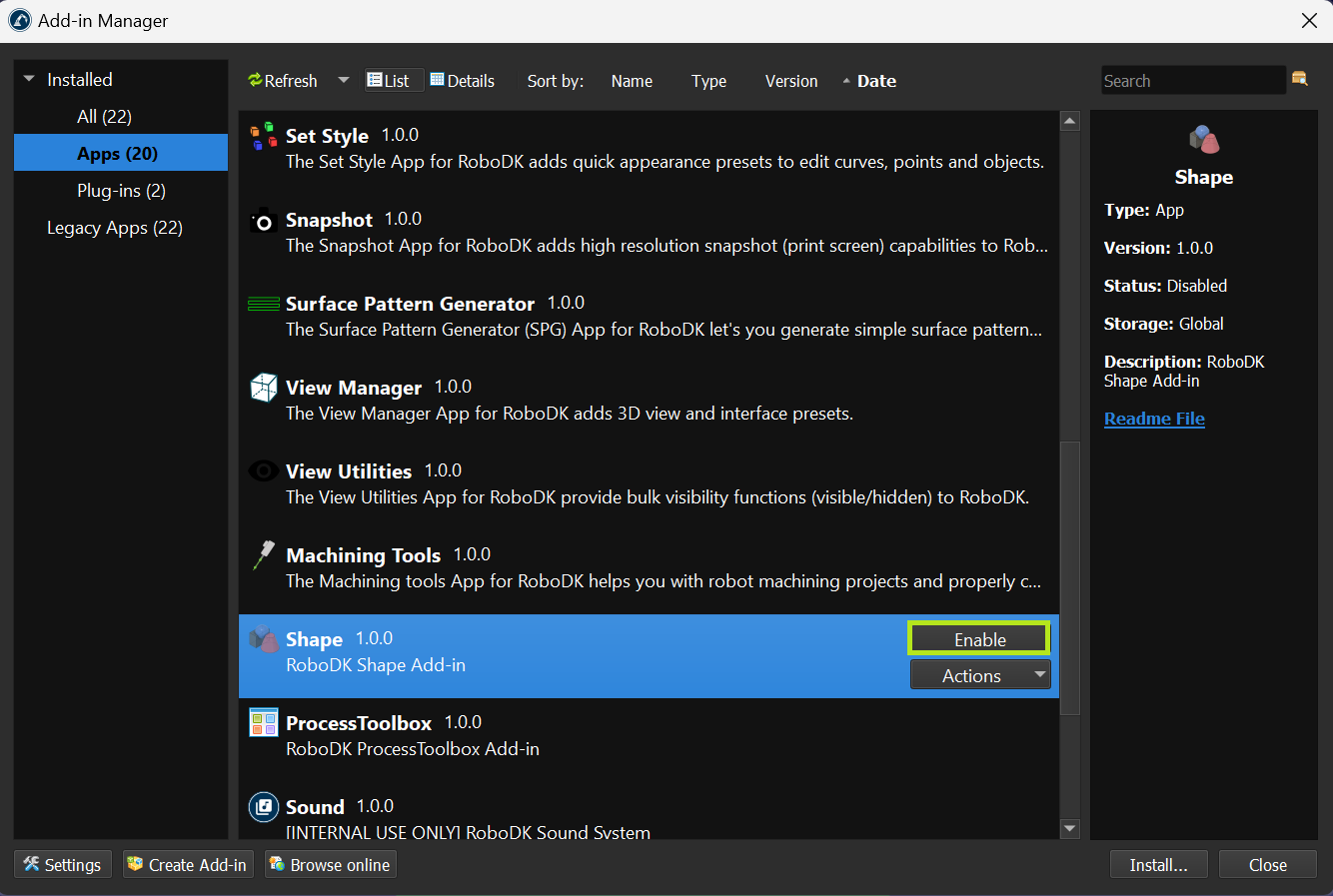
Le socle et l'appareil seront chargés à l'aide de fichiers locaux, et pour créer le sol, nous utiliserons l'Add-in Shape. Vous pouvez consulter notre guide de démarrage et la documentation de l'Add-in Shape pour plus de détails.
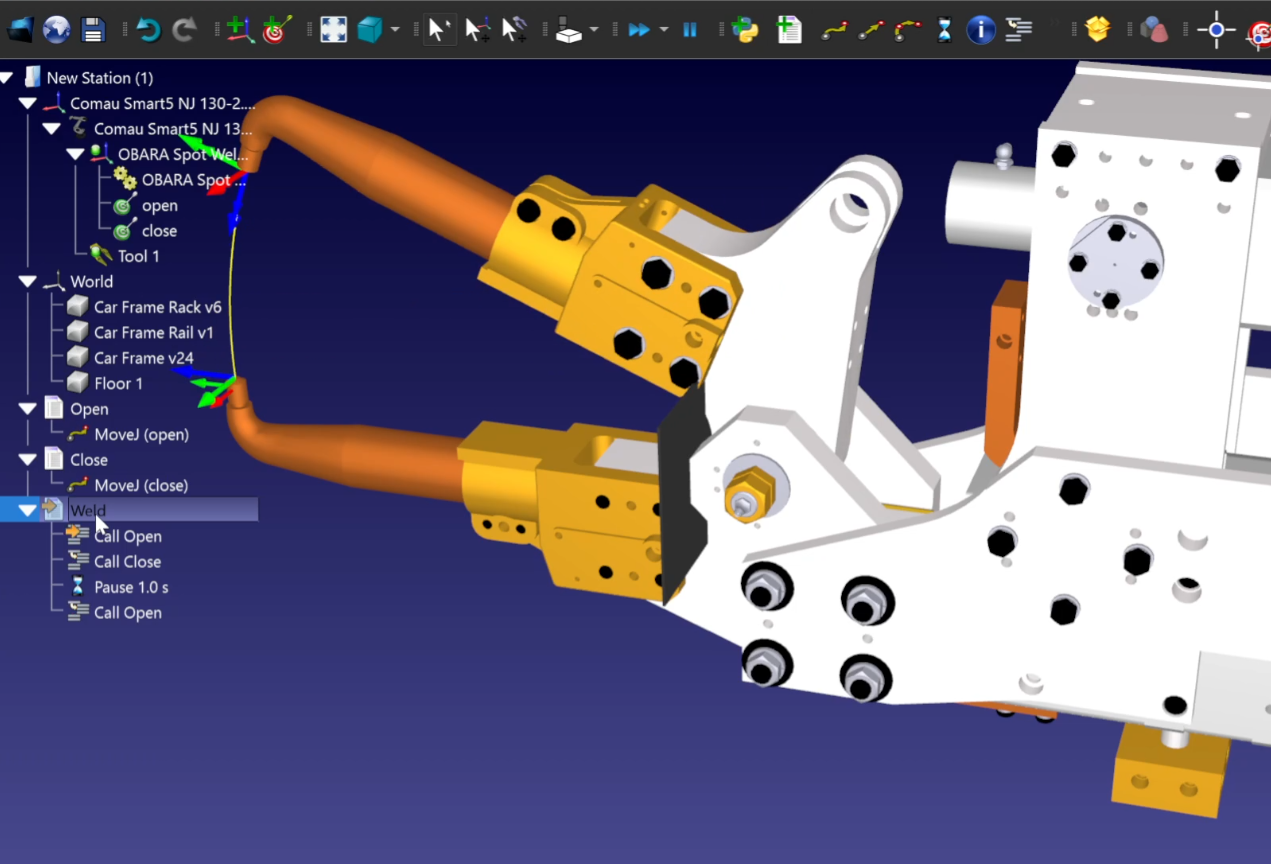
Pistolet de soudage par points
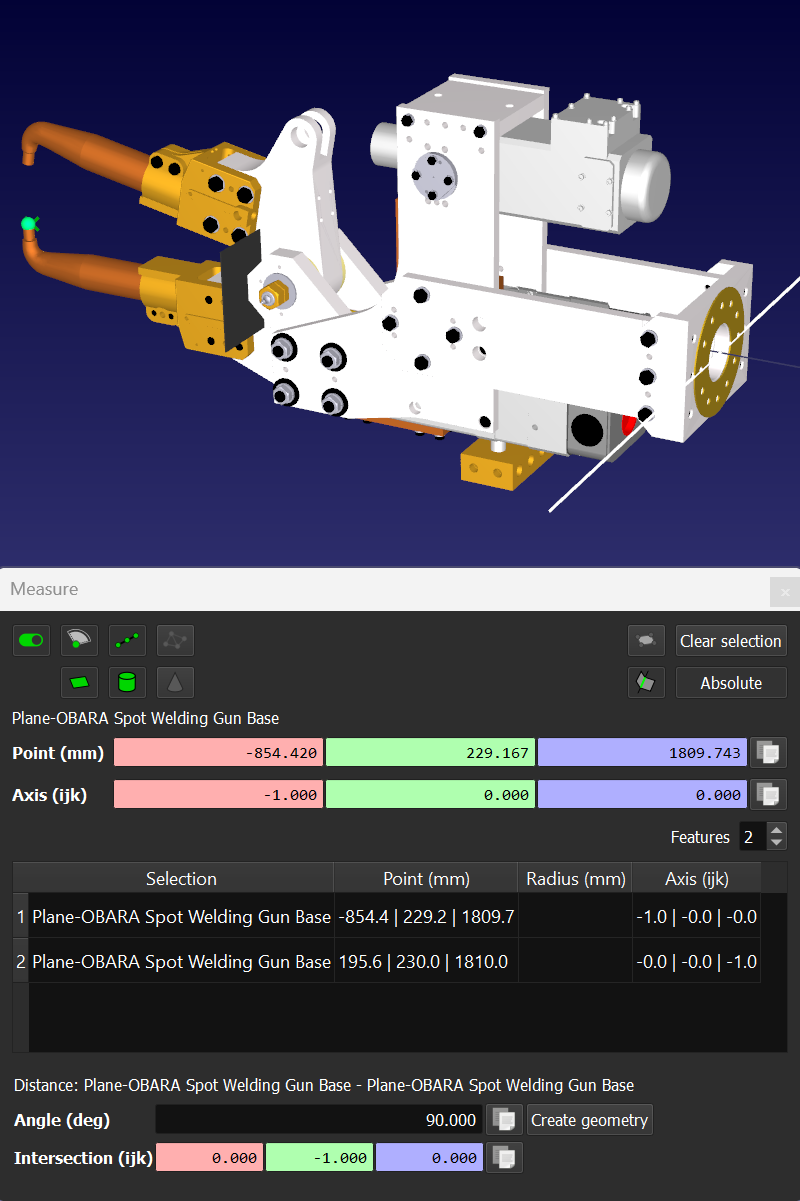
Cette section montre comment vous pouvez animer le mouvement du pistolet de soudage par points et créer le point central de l'outil (CDO).
Pour ajouter un pistolet de soudage par points avec une pièce de serrage mobile, le CDO correspondant doit être défini, et le mécanisme doit être attaché séparément. Vous pouvez mesurer la position du point CDO par rapport à la bride en sélectionnant Outils-Mesure.
Vous pouvez créer deux cibles d'articulation pour ouvrir et fermer le pistolet de soudage par points. Ces cibles peuvent être utilisées dans des programmes pour simuler le processus de soudage par points :
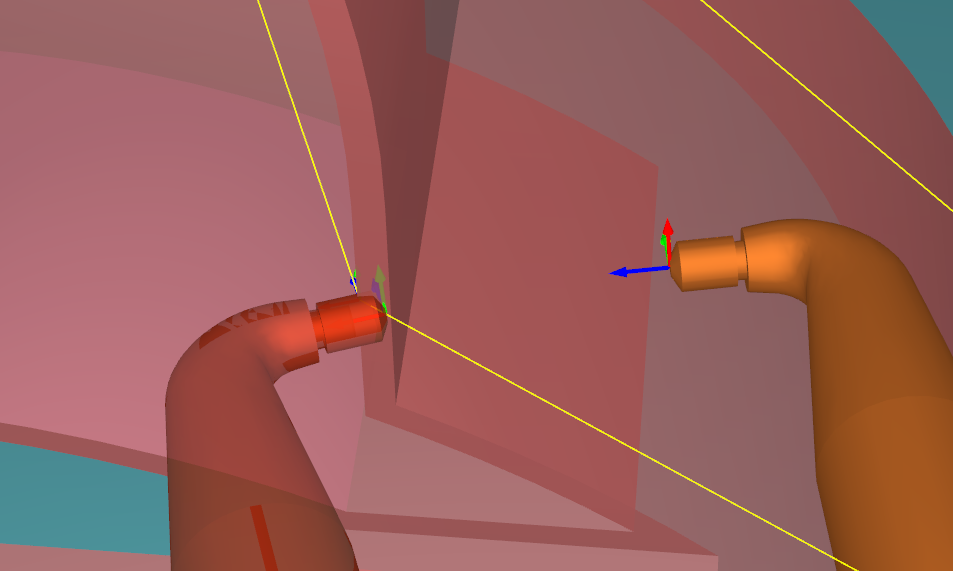
Points de soudure par points
Cette section montre comment créer les points de soudage par points sur le châssis de la voiture pour déplacer le pistolet de soudage par points.
Supposons que vous deviez souder par points les parties avant et arrière du châssis de la voiture. À l'aide de l'Add-in Utilitaires de point, vous pouvez placer des points de soudure par points directement sur des surfaces. Après avoir converti les points en cibles (il s'agit d'une fonctionnalité intégrée de l'Add-in Point Utilities), vous pouvez réaligner l'orientation des cibles par rapport aux angles du CDO :
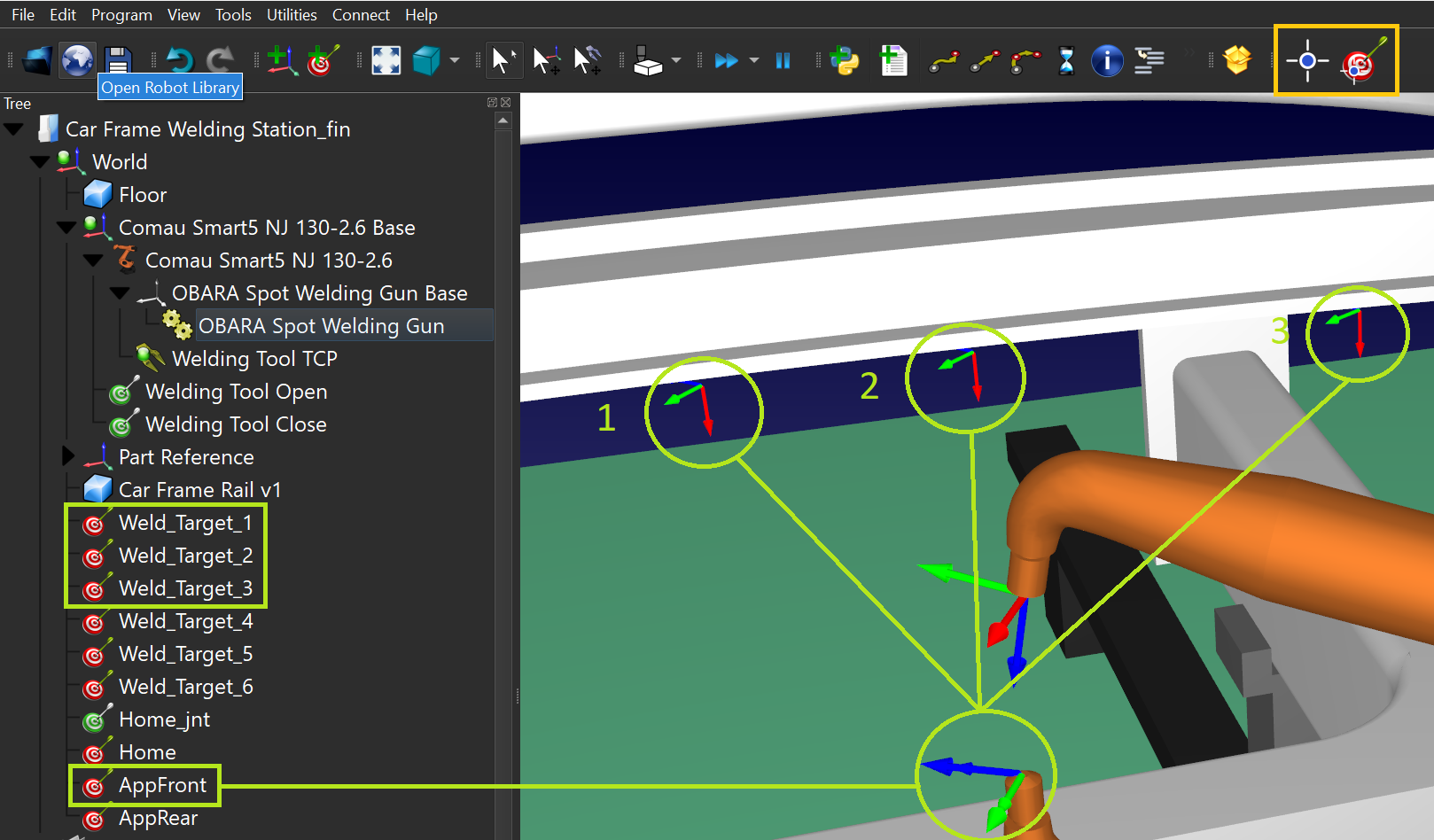
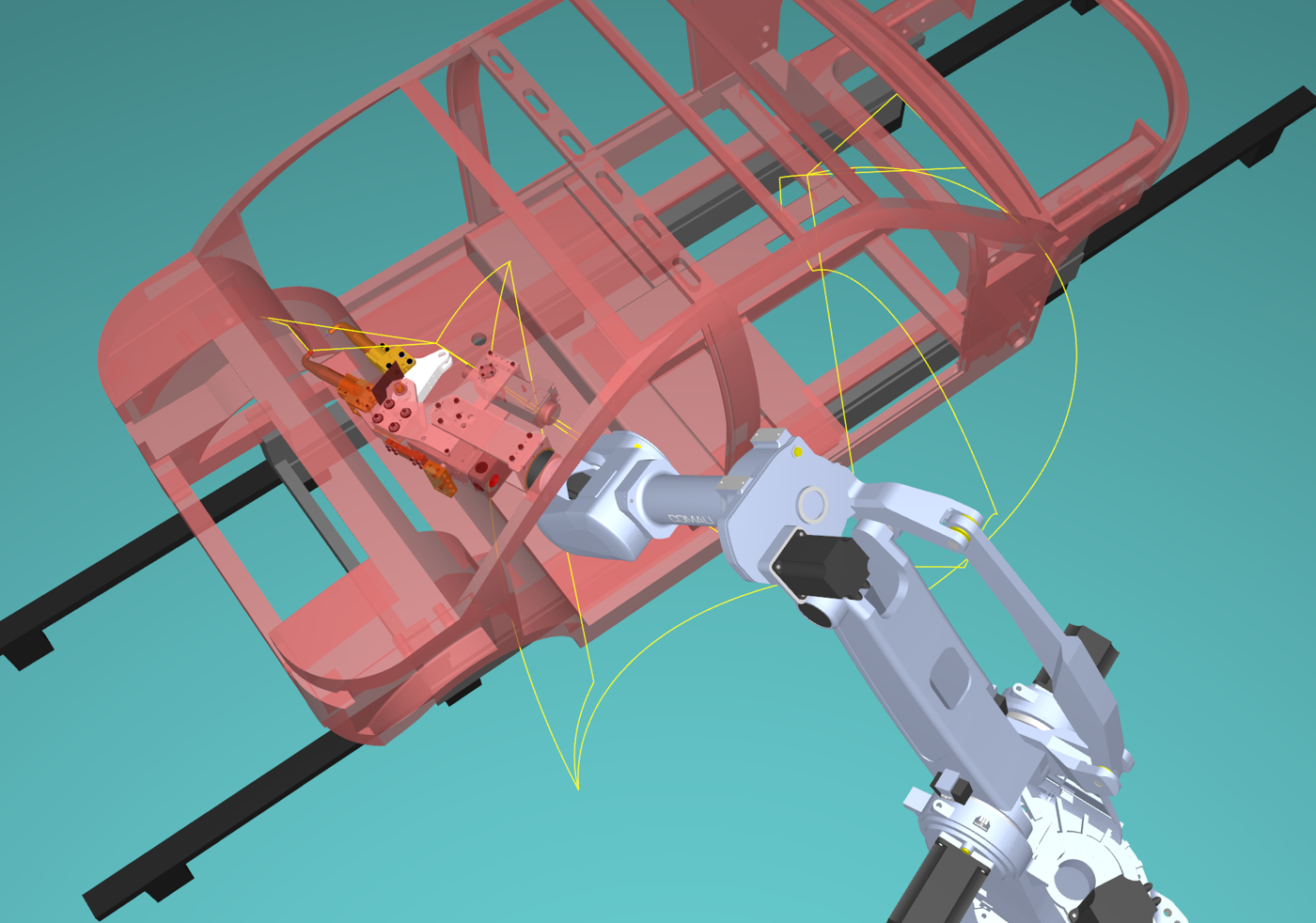
Planification de la trajectoire
Cette section montre comment vous pouvez créer un parcours sans collision entre deux points à l'intérieur du châssis de la voiture.
Le châssis du véhicule est doté d'une poutre de force qui empêche un accès facile de l'avant à l'arrière, vous devez créer deux cibles d'approche qui permettent de passer à l'intérieur du châssis.
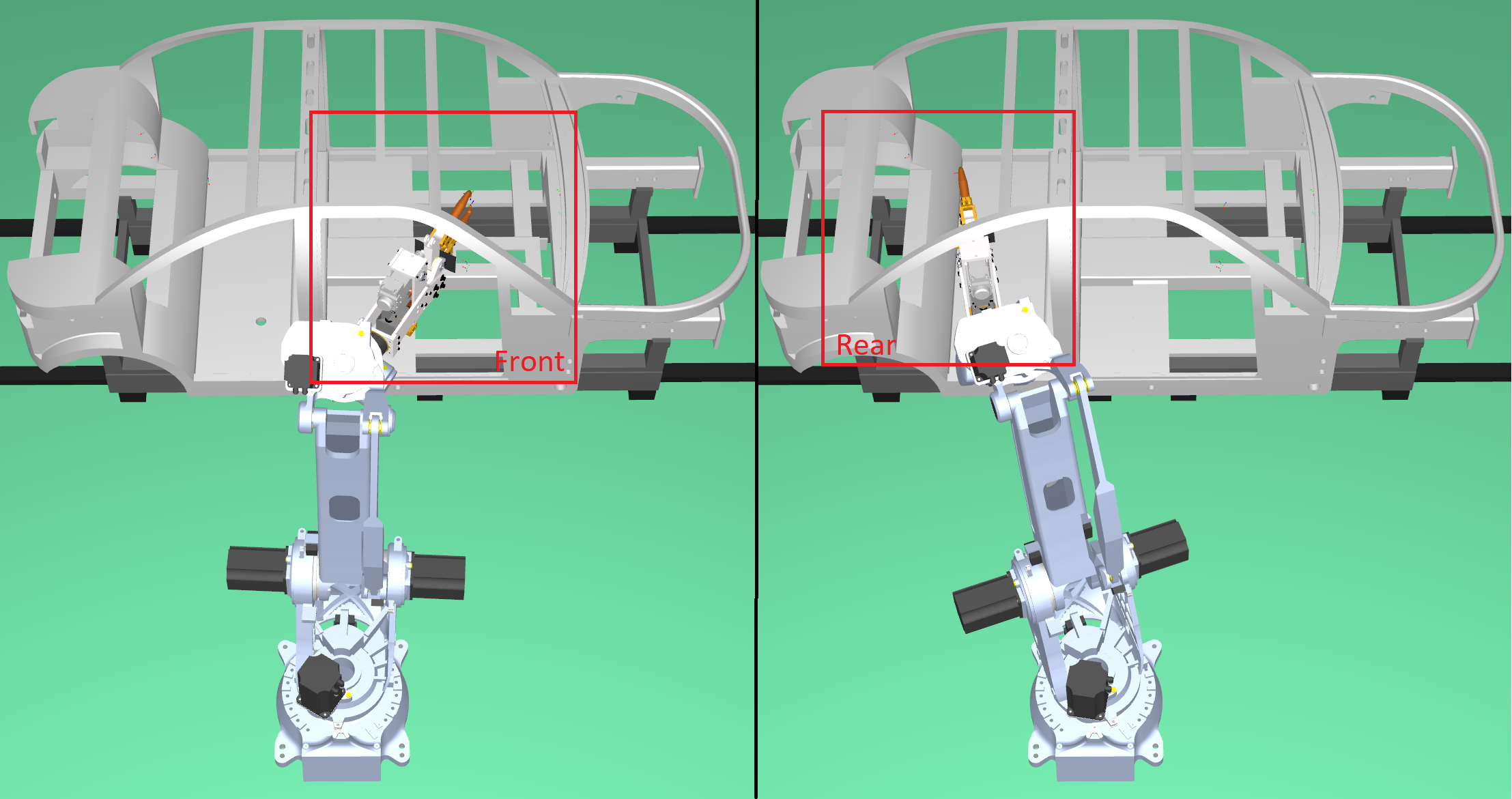
Nous devons également créer une cible intermédiaire entre les deux cibles d'approche. Nous pouvons créer des cibles d'approche basées sur la position de l'outil pour les cibles de soudage par points.
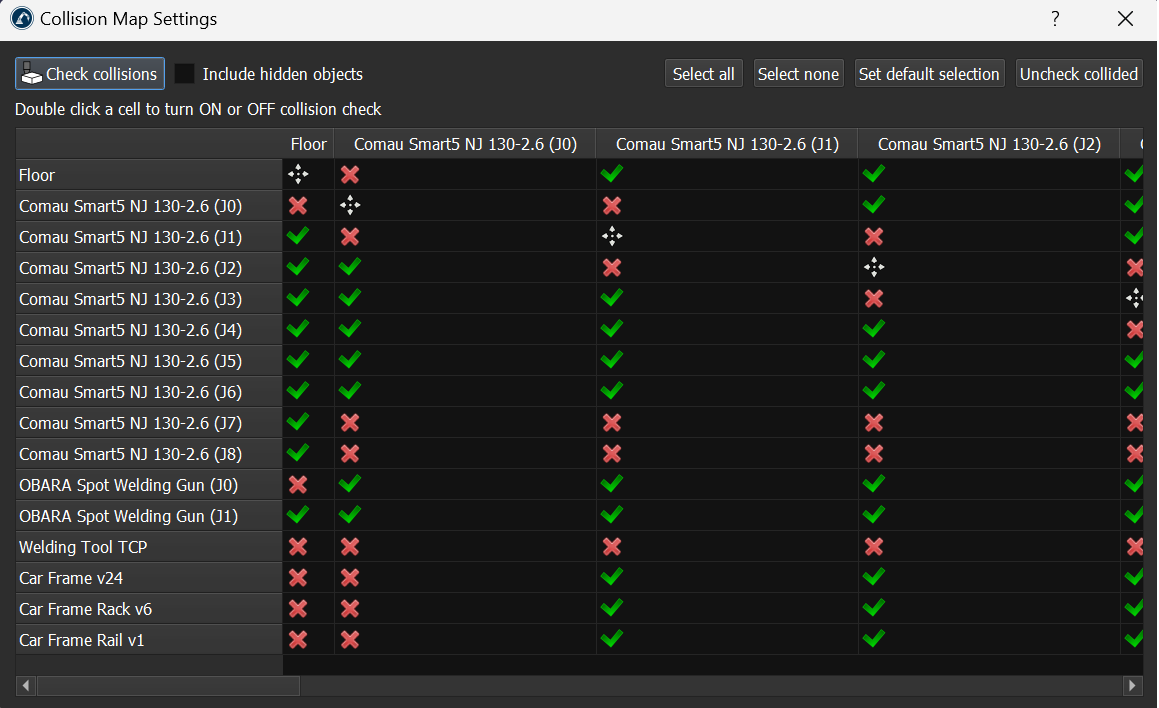
Détection de collision
Une fois que vous avez un parcours, vous pouvez vérifier s'il y a des collisions et vous assurer que vous avez correctement défini votre carte de collision.
Vous pouvez vérifier si des pièces entrent en collision en sélectionnant OutilsàVérifier les collisions. Cela permet d'activer/désactiver la détection des collisions.
Vous pouvez ensuite configurer la carte de collision en sélectionnant Outils->Carte de collision.
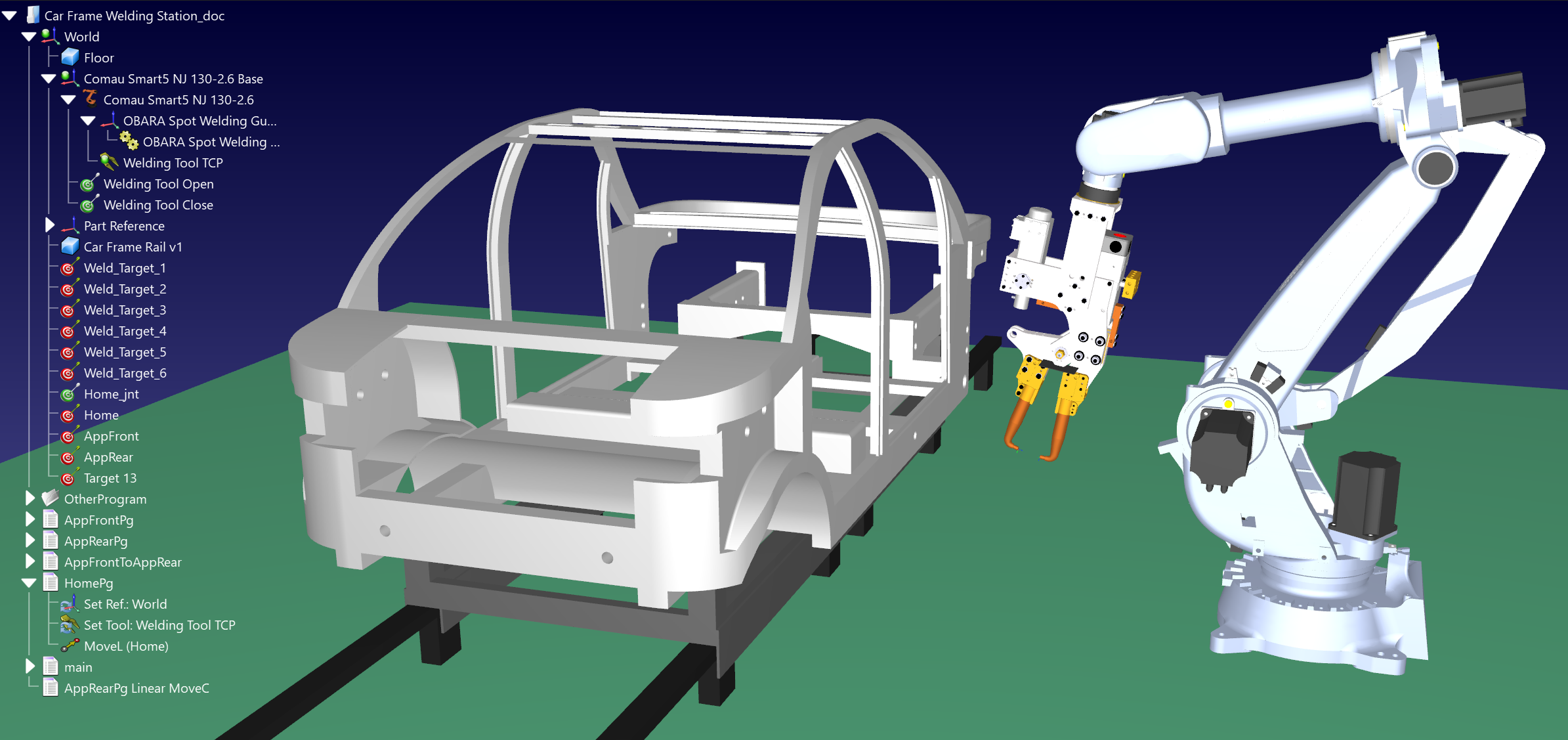
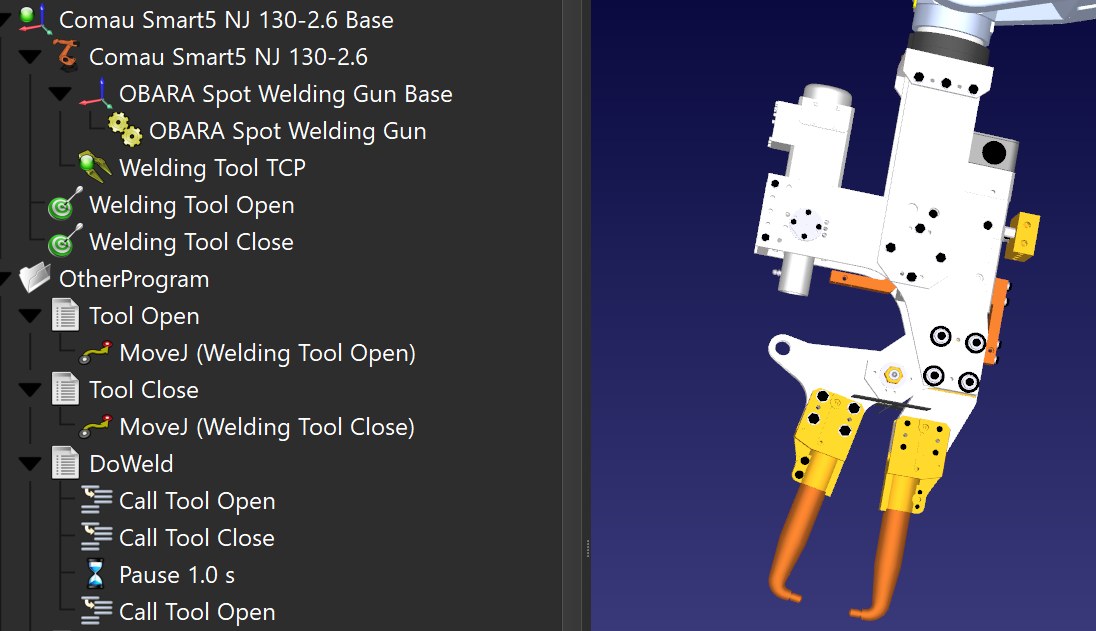
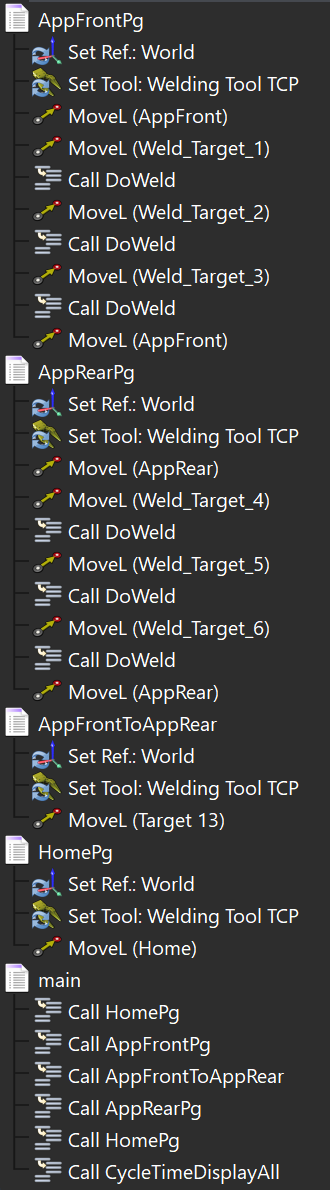
Séquence de programmes
Cette section vous aide à créer la séquence de soudage par points divisée en un programme principal et des sous-programmes afin d'organiser la simulation et les programmes générés.
Il est conseillé de diviser la simulation en plusieurs programmes afin de faciliter les modifications futures et/ou la collaboration entre les membres de l'équipe. Pour cette station, nous utilisons un programme principal avec plusieurs routines :
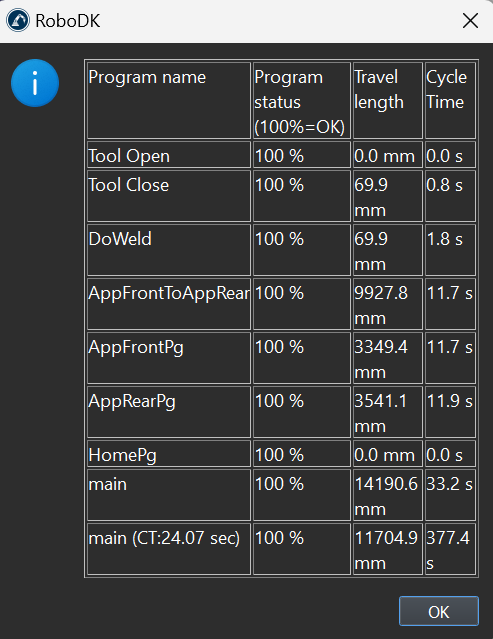
Estimation du temps de cycle
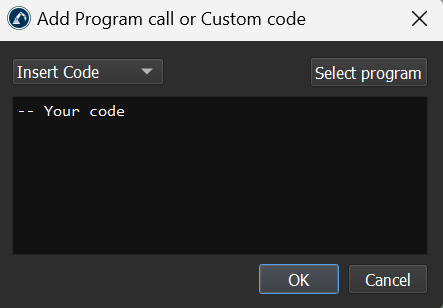
Cette section montre comment vous pouvez calculer et afficher l'estimation du temps de cycle de la simulation de soudage par points.
Vous pouvez facilement ajouter l'estimation du temps à votre programme en chargeant simplement le script CycleTimeDisplayAll.py depuis le dossier C:\RoboDK\Library\Scripts. Vous pouvez ensuite l'appeler à partir du programme principal :
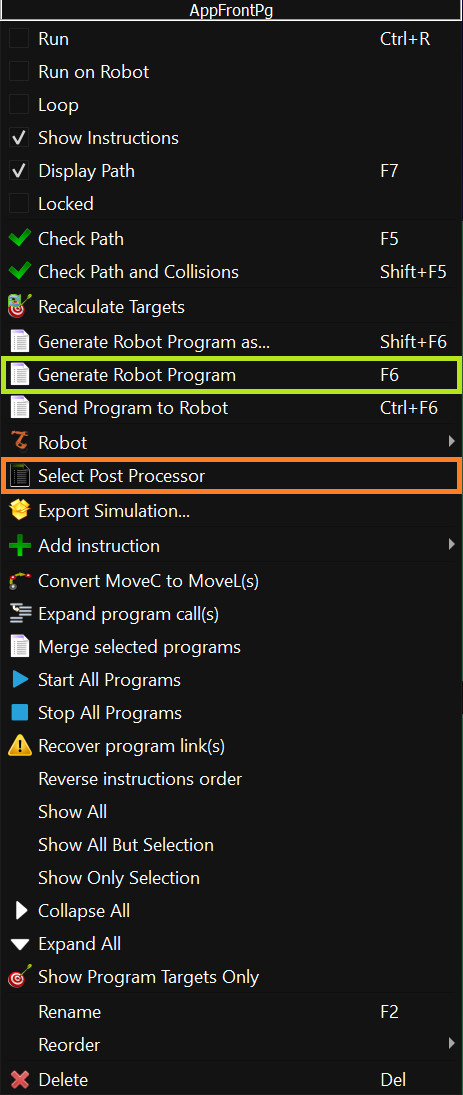
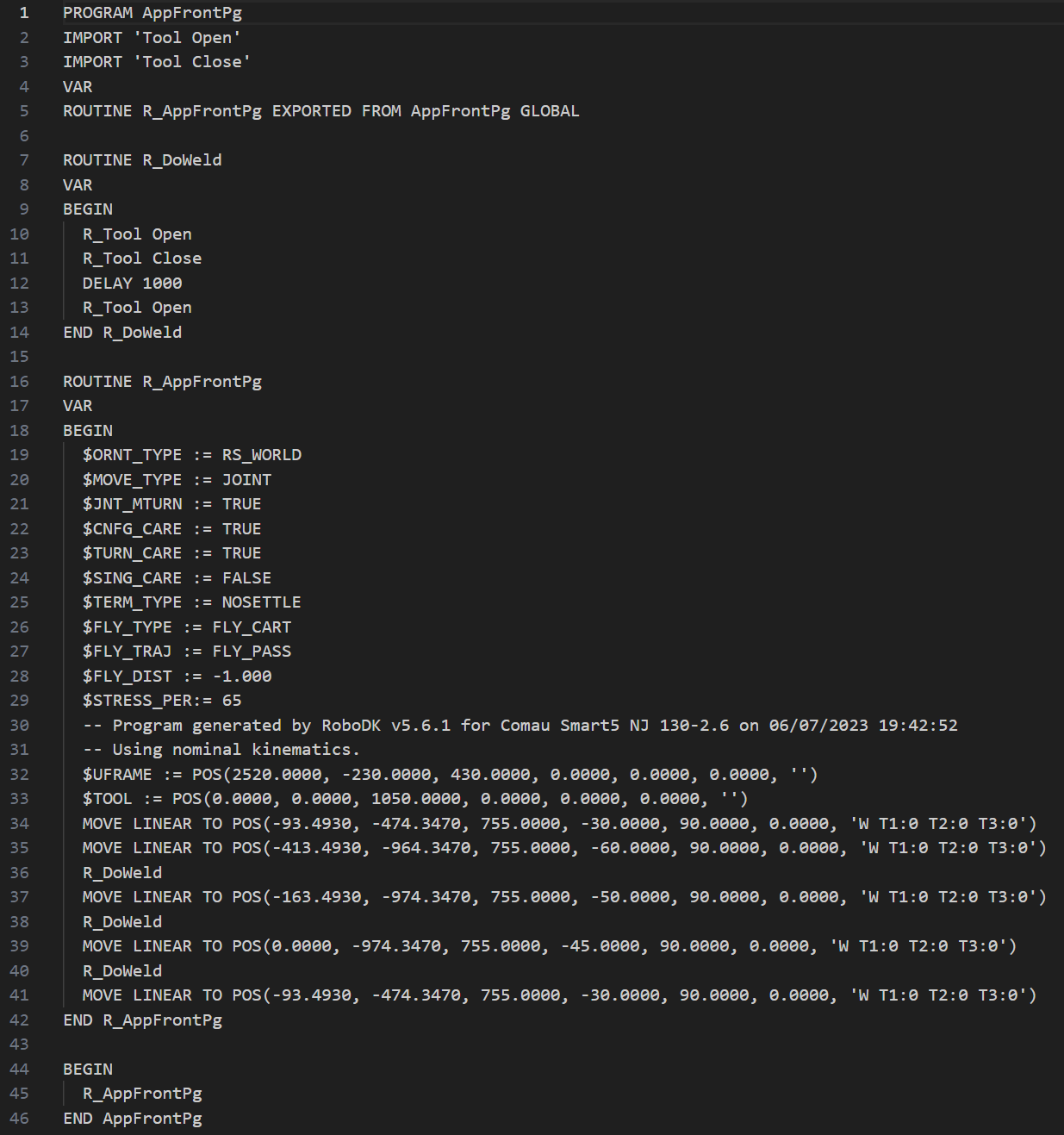
Générer un programme de robot
Une fois que vous disposez d'une séquence de simulation valide pour votre application de soudage par points, vous pouvez générer le programme en quelques clics.
Sélectionnez le programme que vous souhaitez générer pour votre robot en cliquant avec le bouton droit de la souris sur le programme et en sélectionnant Générer le programme du robot.