Modèle d'importation
Vous devez d'abord importer la pièce et les parcours de soudage depuis Fusion 360.
Astuce : Reportez-vous à notre vidéo connexe pour plus d'informations sur l'importation de pièces, de courbes et de points depuis Fusion : https://www.youtube.com/watch?v=gxob-94fNLo.
Importez le modèle depuis Fusion 360 :
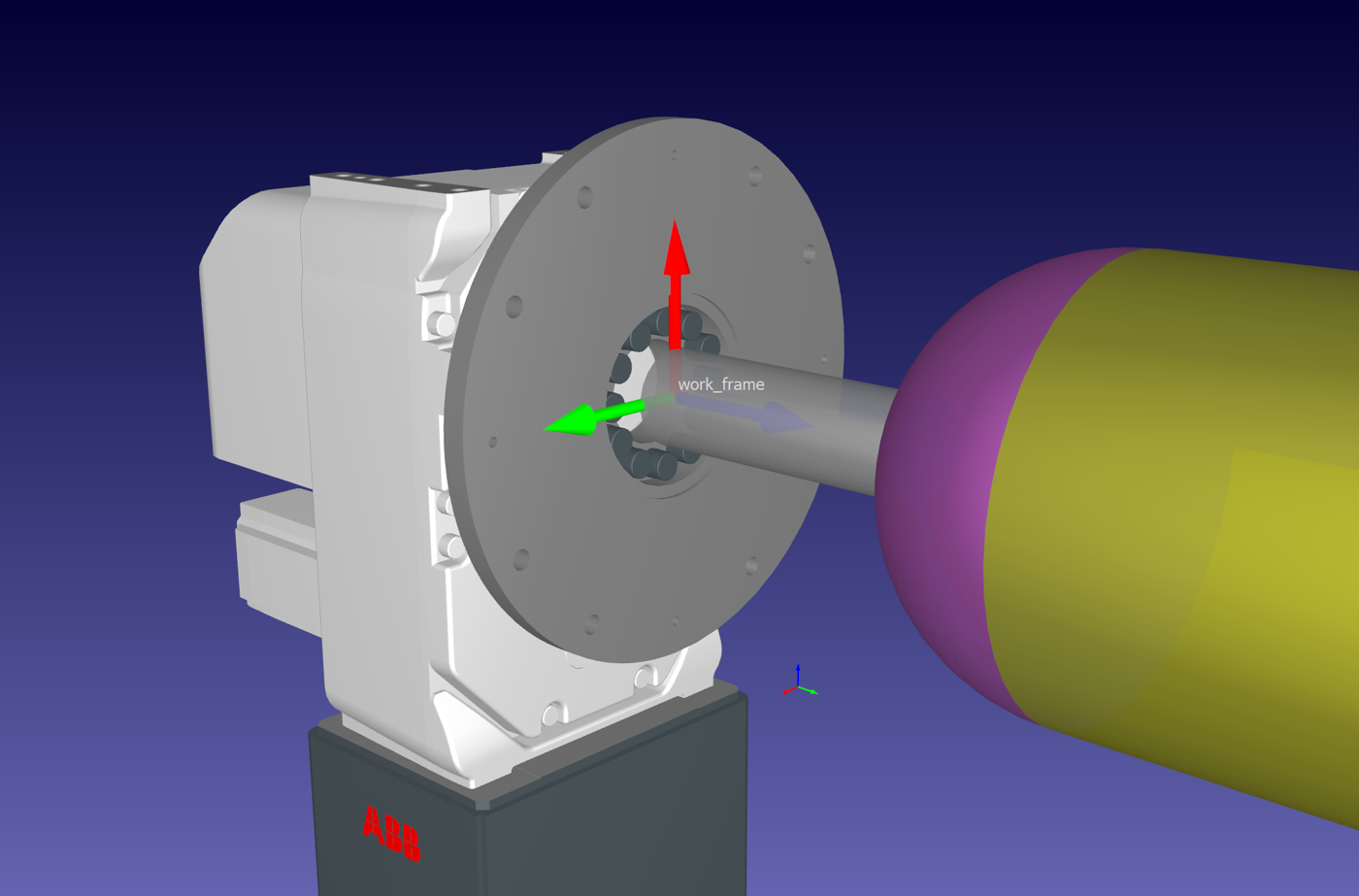
1.Sélectionnez le système de coordonnées de la bride du positionneur pour la fixation du réservoir dans RoboDK.
2.Allez dans l'onglet RoboDK dans les utilitaires de Fusion 360 et sélectionnez Charger le modèle.
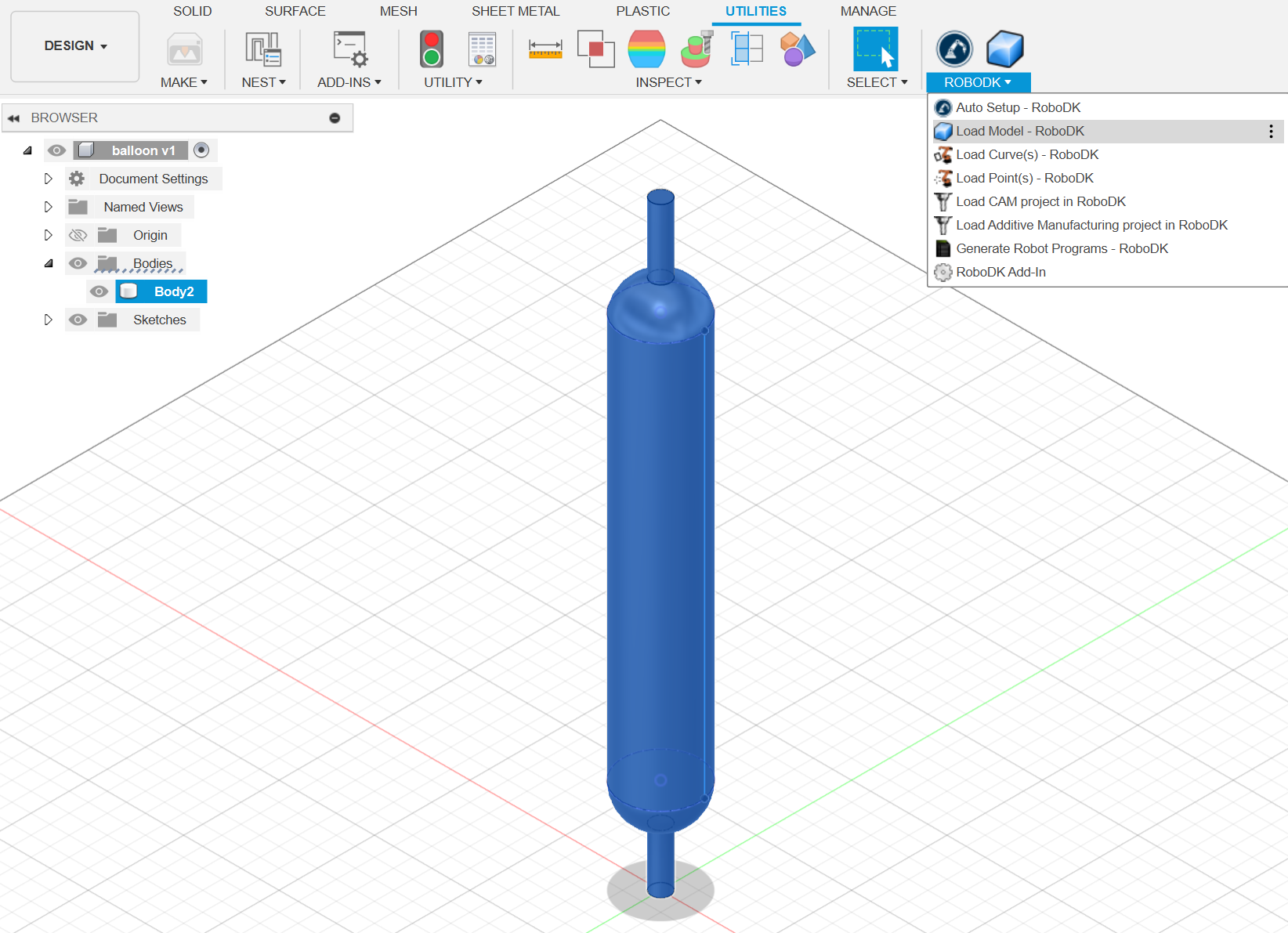
3.Vérifiez la position du modèle de réservoir et renommez-le.