Welding with Positionner
Introduction
Cet exemple vous montrera comment utiliser RoboDK pour la simulation du soudage d'un réservoir. Cet exemple comprend un modèle de réservoir et une cellule robotique avec un robot de soudage ABB associé à un positionneur à axe unique.
Exemple de soudage robotisé
Pour réaliser ce projet de soudage de robot, vous devez d'abord sélectionner l'exemple de soudage de robot RoboDK avec positionneur dans la bibliothèque par défaut. Ensuite, vous devez sélectionner les parcours de soudage dans Fusion 360. Ensuite, vous devez ajuster le parcours du robot dans RoboDK.
Modèle d'importation
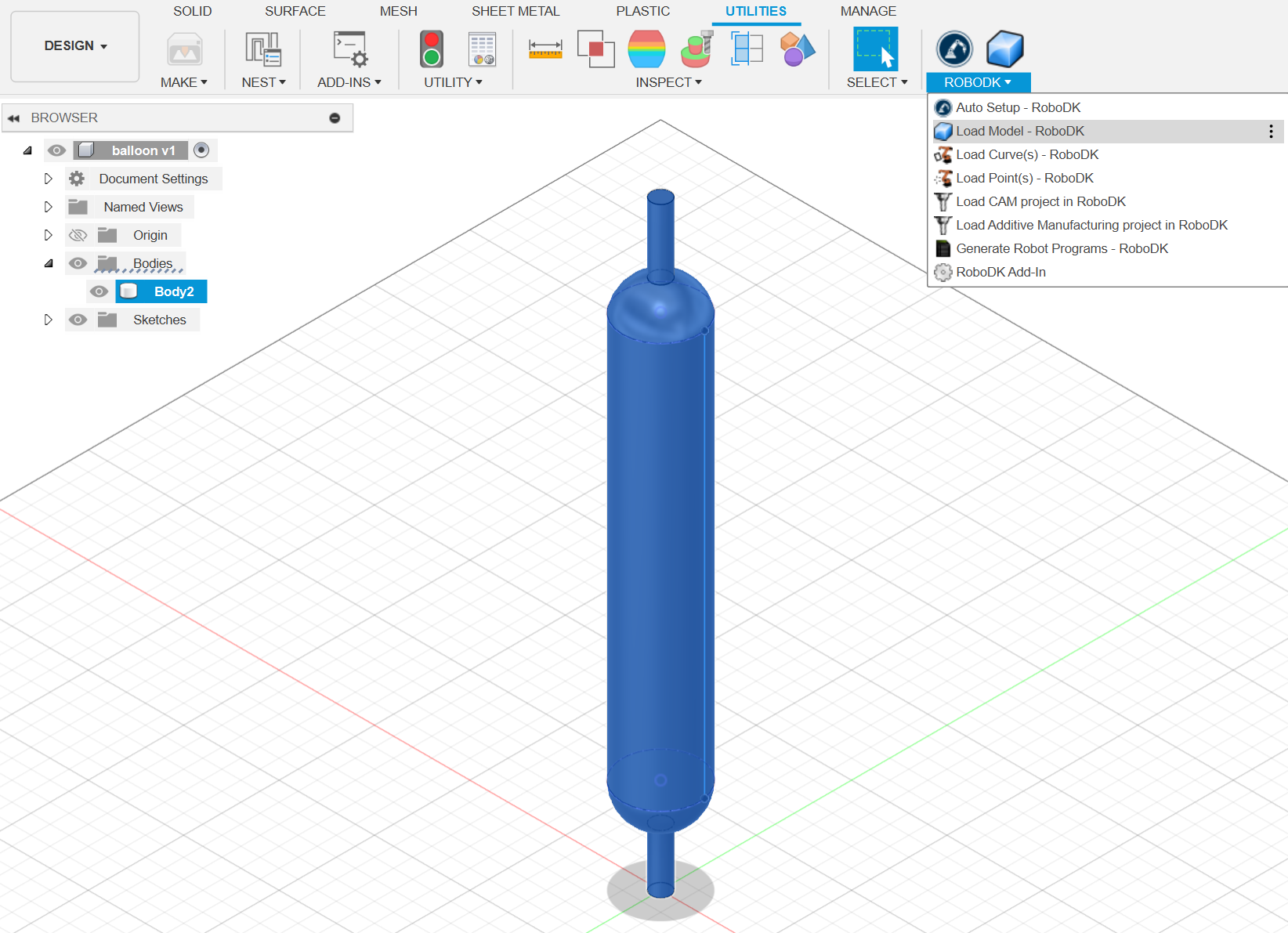
Vous devez d'abord importer la pièce et les parcours de soudage depuis Fusion 360.
Importez le modèle depuis Fusion 360 :
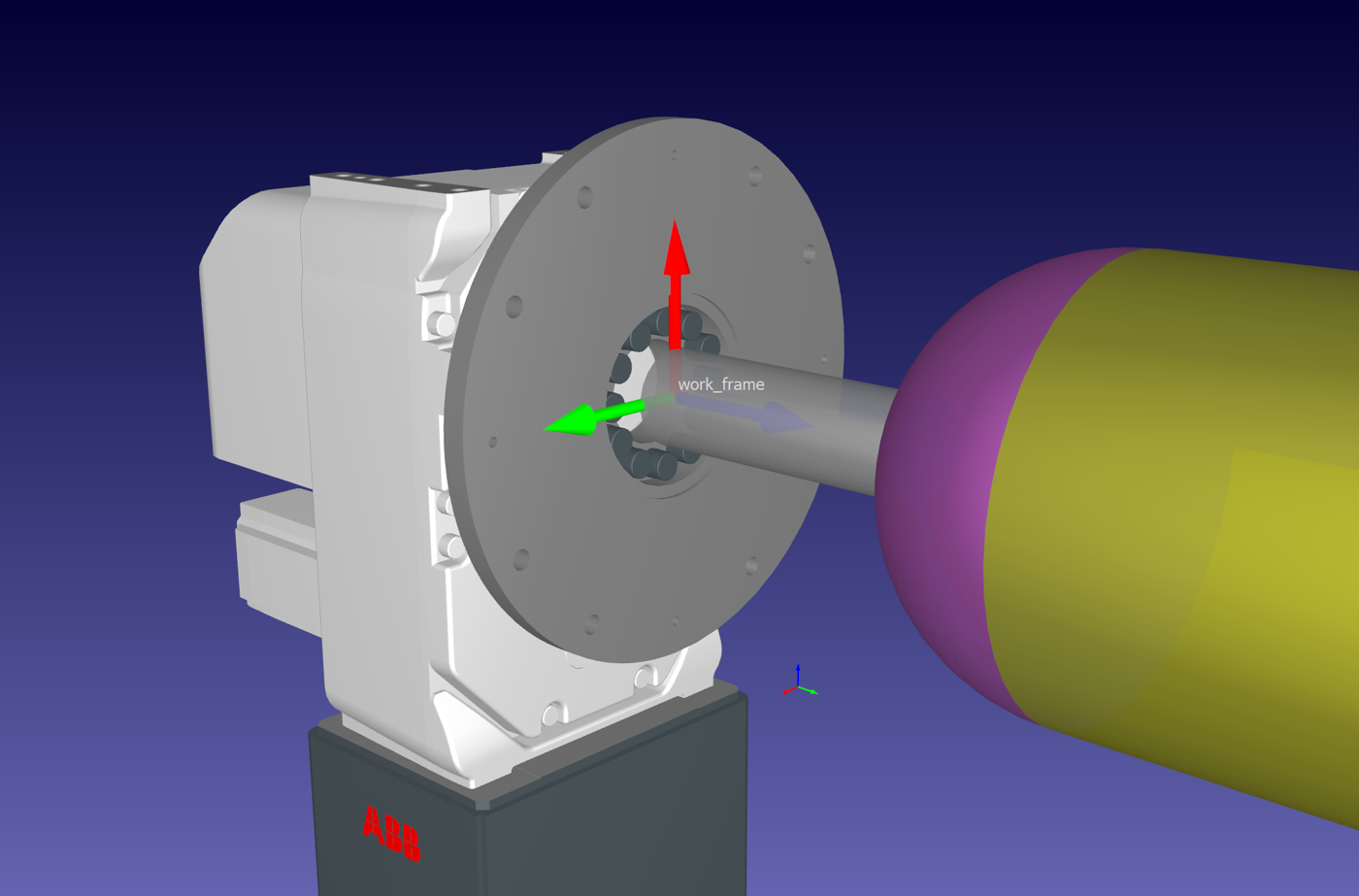
1.Sélectionnez le système de coordonnées de la bride du positionneur pour la fixation du réservoir dans RoboDK.
2.Allez dans l'onglet RoboDK dans les utilitaires de Fusion 360 et sélectionnez Charger le modèle.
3.Vérifiez la position du modèle de réservoir et renommez-le.
Importation du parcours
Après avoir importé le modèle, il faut importer les parcours de soudage.
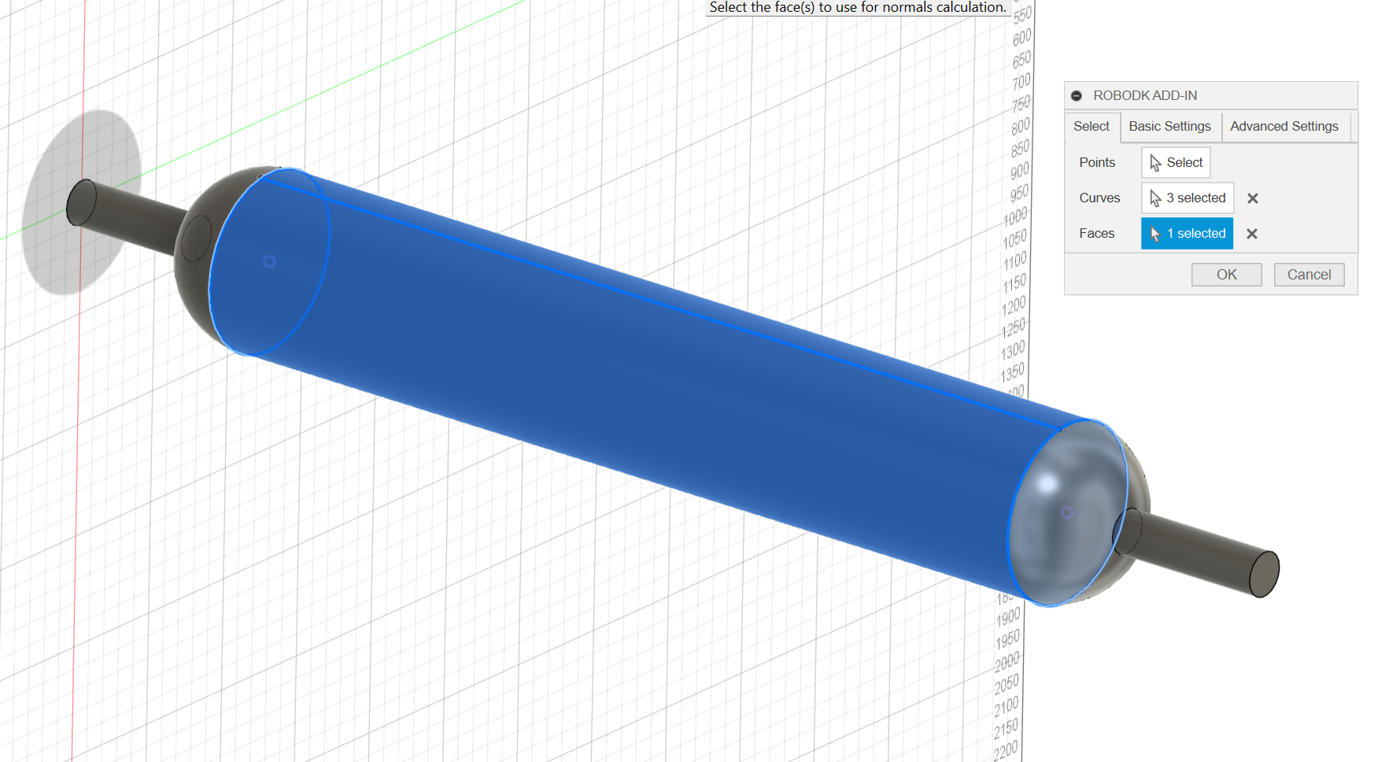
Importez le parcours depuis Fusion 360 :
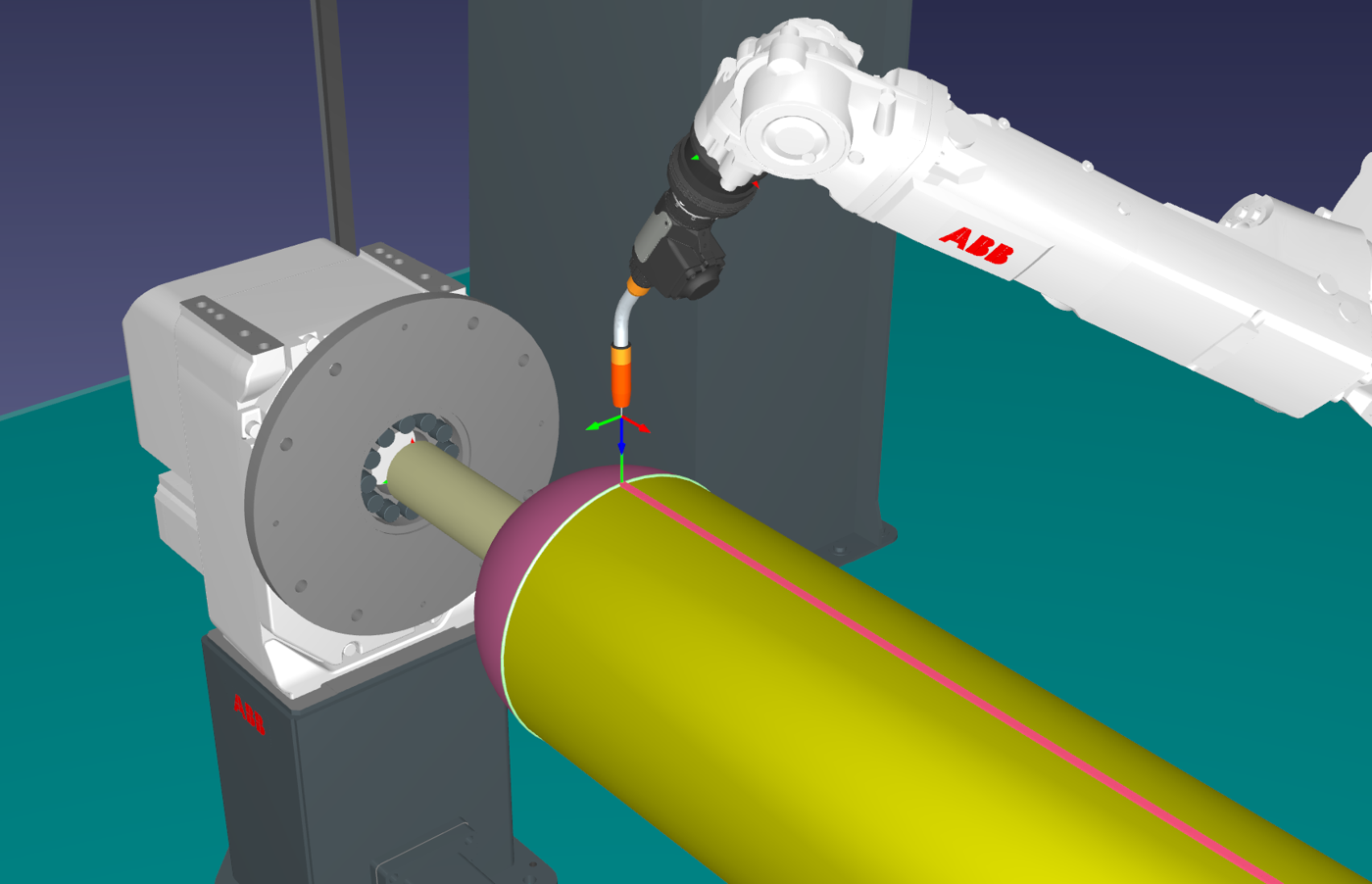
1.Sélectionnez les parcours de soudage. Veillez à sélectionner également les faces, car elles permettent d'orienter l'outil du robot.
2.Maintenant que vous avez importé le parcours depuis Fusion 360, vous pouvez aller dans RoboDK.
3.Vérifiez la position du parcours et renommez-le.
Configuration du projet Curve Follow
Après l'importation des modèles et des parcours de soudage, l'étape suivante consistera à créer les projets de suivi de courbe correspondants.
1.Créez le nouveau projet de suivi de courbe (Utilitaires->Projet de suivi de courbe).
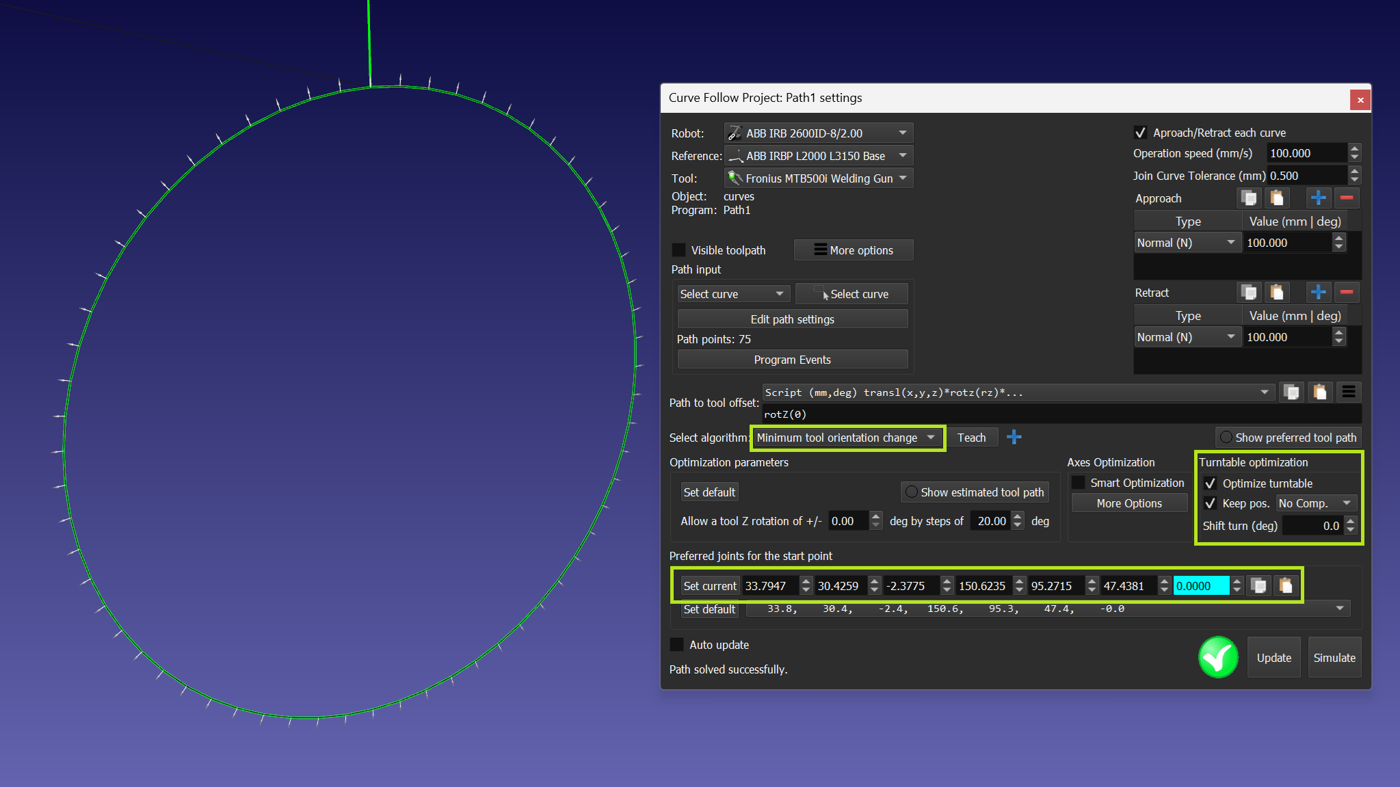
2.Sélectionnez la première courbe circulaire.
3.Utiliser la position CDO fixe sans compensation.
4.Définissez explicitement le point de départ et l'orientation du CDO.
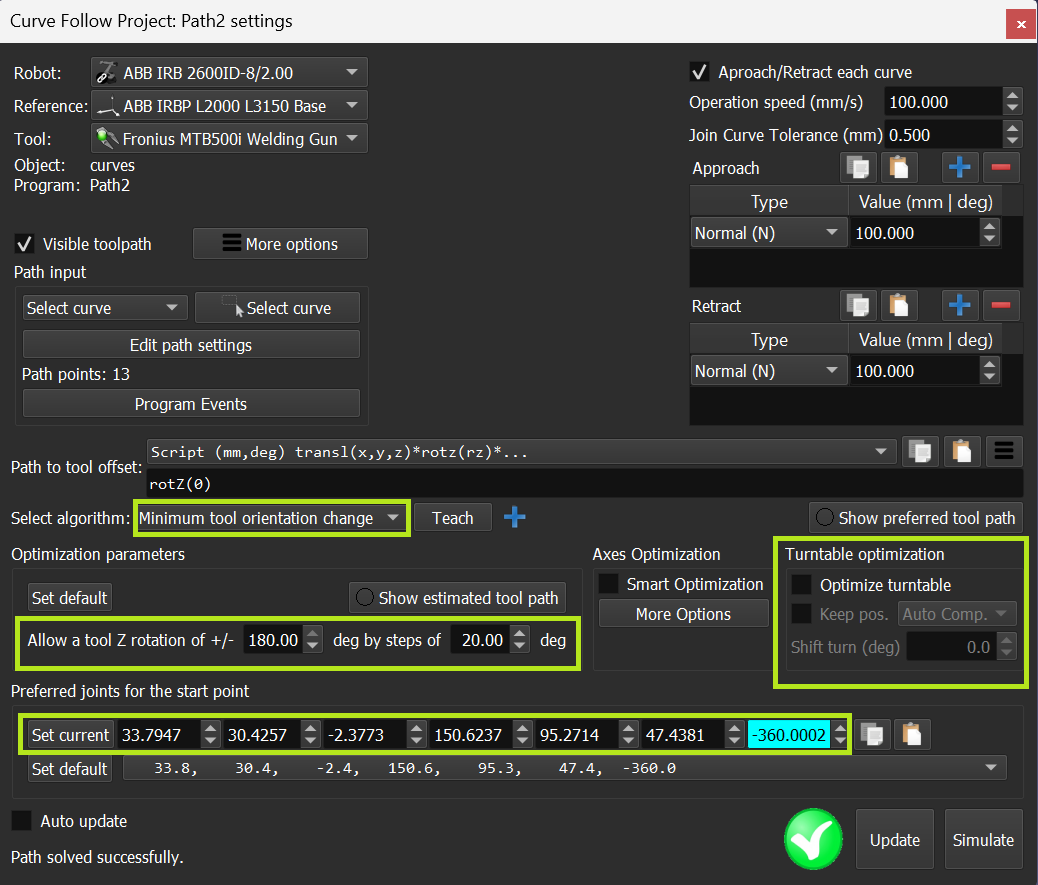
5.Créez le nouveau projet de suivi de courbe (Utilitaires->Projet de suivi de courbe) pour une couture droite.
6.Exclure l'utilisation de la rotation du positionneur et définir explicitement le point final de la trajectoire précédente comme point de départ de la nouvelle trajectoire.
7.Créez une trajectoire pour la deuxième couture circulaire et utilisez les mêmes paramètres que pour la première.
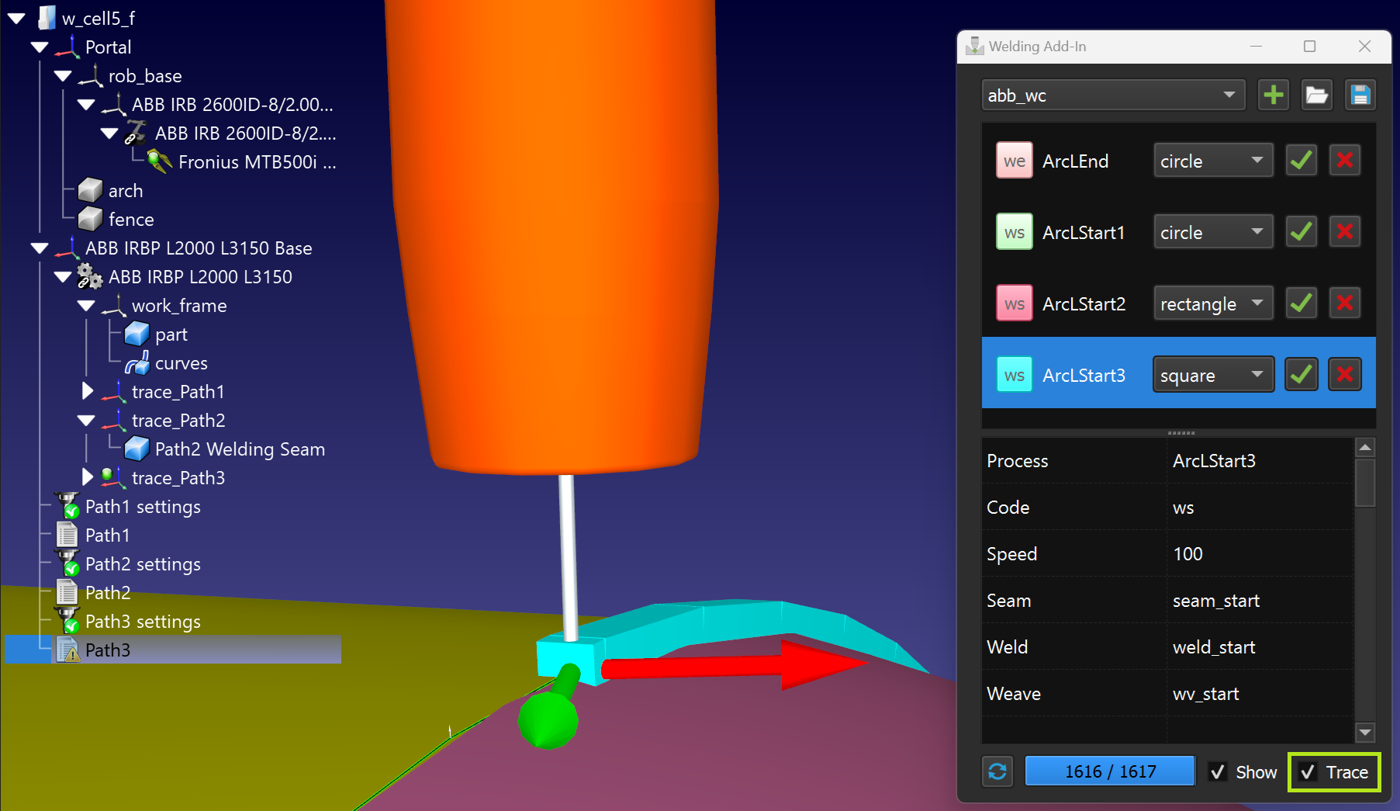
Utilisation de l'Add-in de soudage
Dans cette section, vous apprendrez à appliquer l'Add-in de soudage et à personnaliser chaque opération de soudage. Nous utiliserons les modèles pour les instructions de soudage des robots ABB.
1.Lancez l'Add-in de soudage et ajoutez successivement les modes de soudage nécessaires que nous allons utiliser.
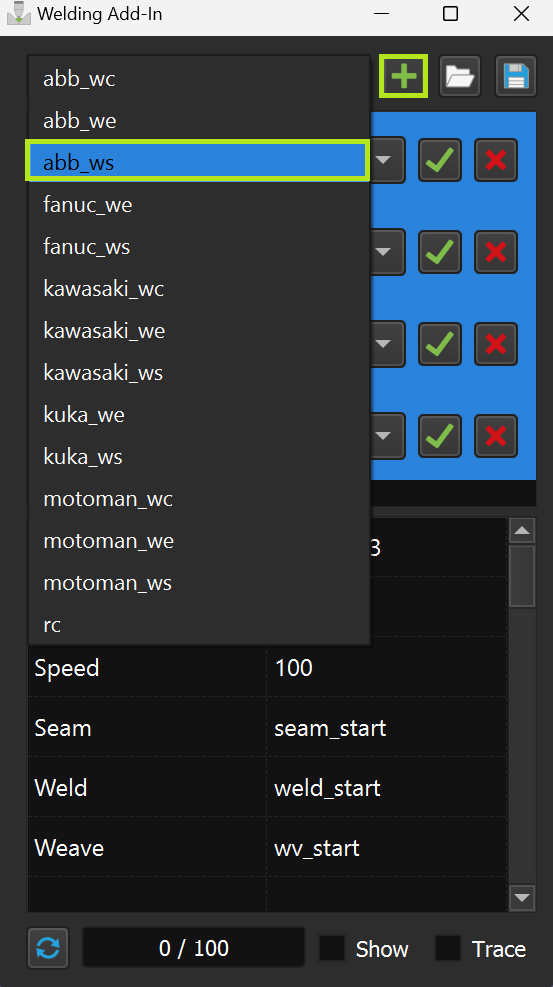
2.Modifiez les noms des modes, car ils doivent être différents, et définissez les paramètres
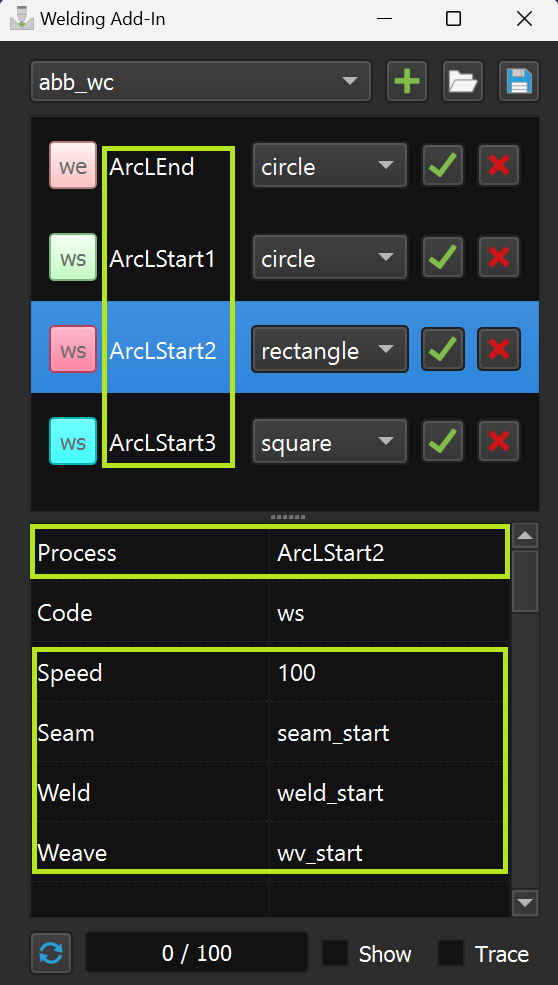
3.Pour chacun des projets de suivi de courbe, sélectionnez et appliquez des instructions pour le début et la fin du soudage (à l'aide de la touche Ctrl).
Veuillez prêter attention à la séquence de sélection sur la capture d'écran ci-dessous.
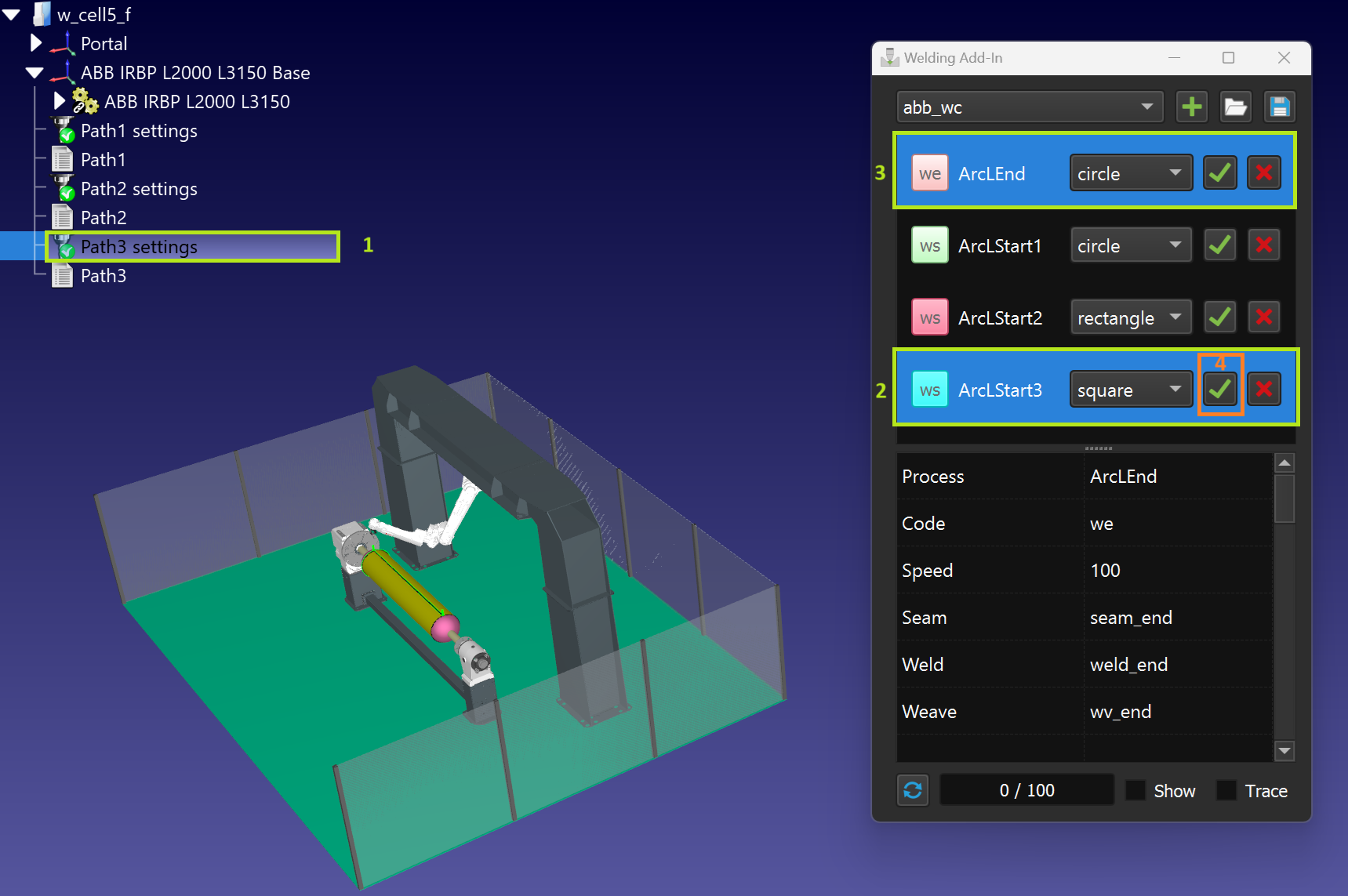
4.Sélectionnez les projets de suivi de courbe appropriés et appuyez sur le raccourci clavier Ctrl + U pour la mise à jour.
5.Vous pouvez créer une visualisation des trajectoires de soudage.
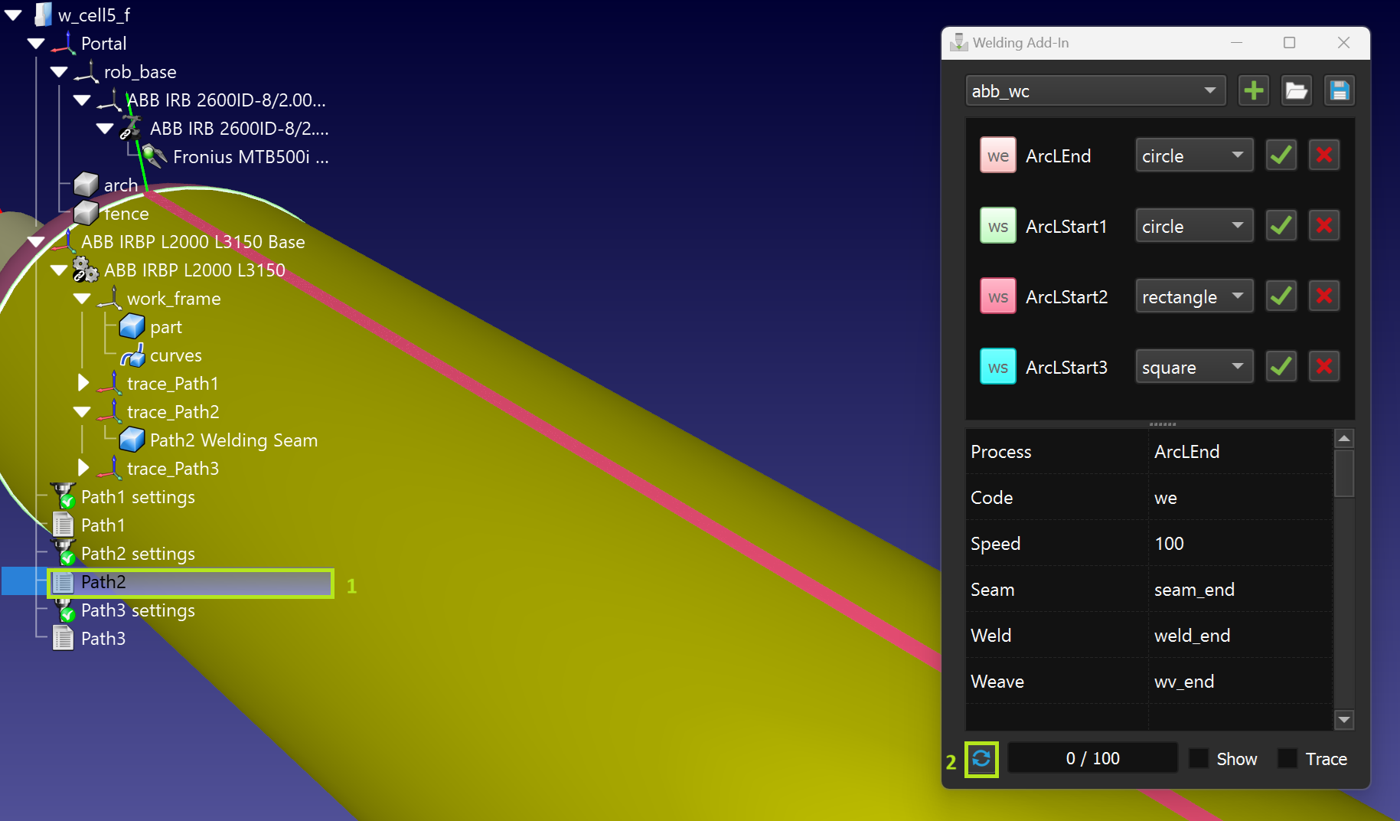
6.Utilisez la case à cocher Trace pour évaluer la façon dont le matériau de soudure est appliqué au fur et à mesure de l'exécution du programme.
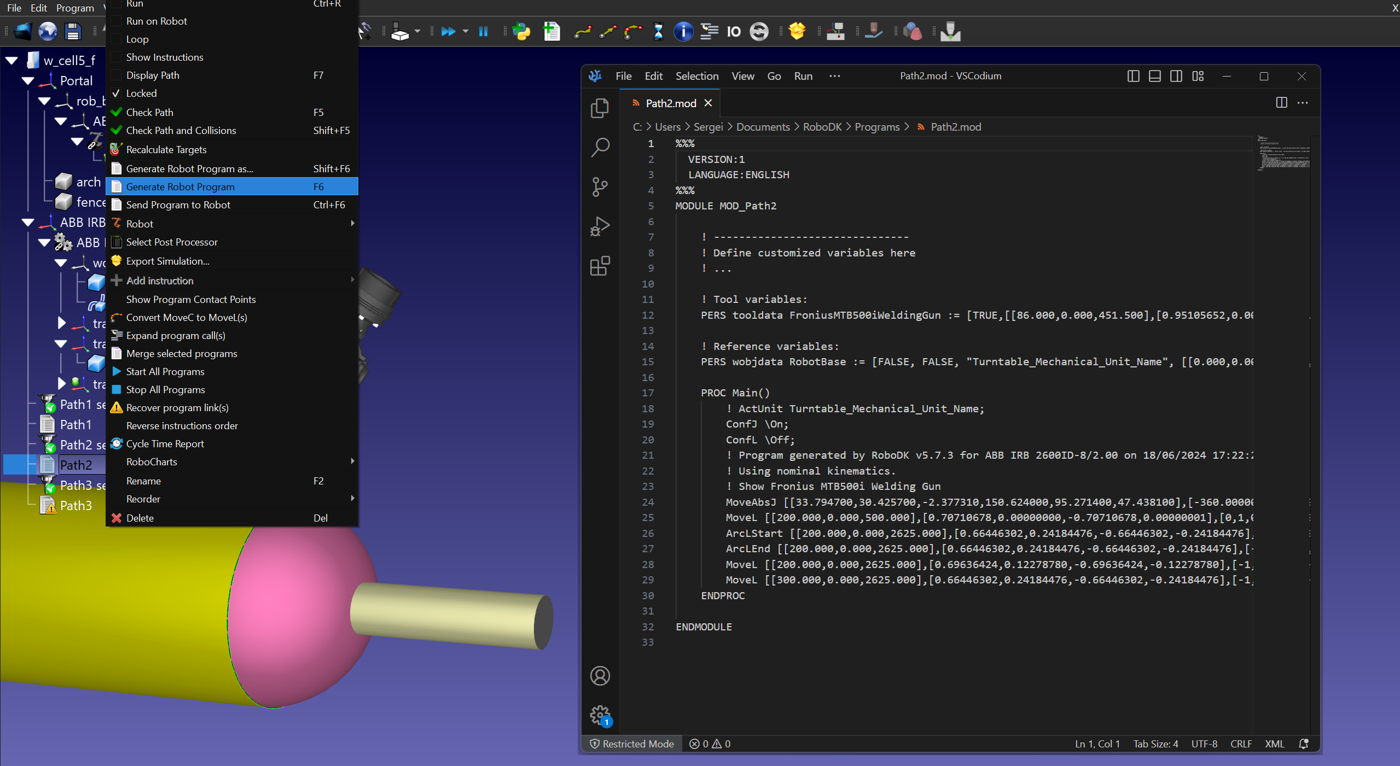
Génération de programmes
Choisissez un post-processeur approprié et vérifiez le programme généré à l'aide de commandes de soudage :