Aligner un objet avec une référence
Cette section explique comment le repère (système de coordonnées) d’un objet peut être aligné avec sa propre géométrie. Cette section permet le mouvement du repère d’un objet vers une localisation qui peut être identifiée en réglage réel.
Suivre ces étapes pour aligner virtuellement le repère d’un objet par rapport aux points spécifiques liés à la géométrie de l’objet.
1.Charger l’objet 
2.Sélectionner la station active 
3.Sélectionner Programme➔
Vérifier que le repère est directement rattaché à la racine de la station (Et non à un autre repère).
4.Faire un clic droit sur le repère et choisir 
La procédure est similaire à la section précédente. La différence principale est que vous devez sélectionner les points de l’objet virtuel au lieu de l’objet réel.
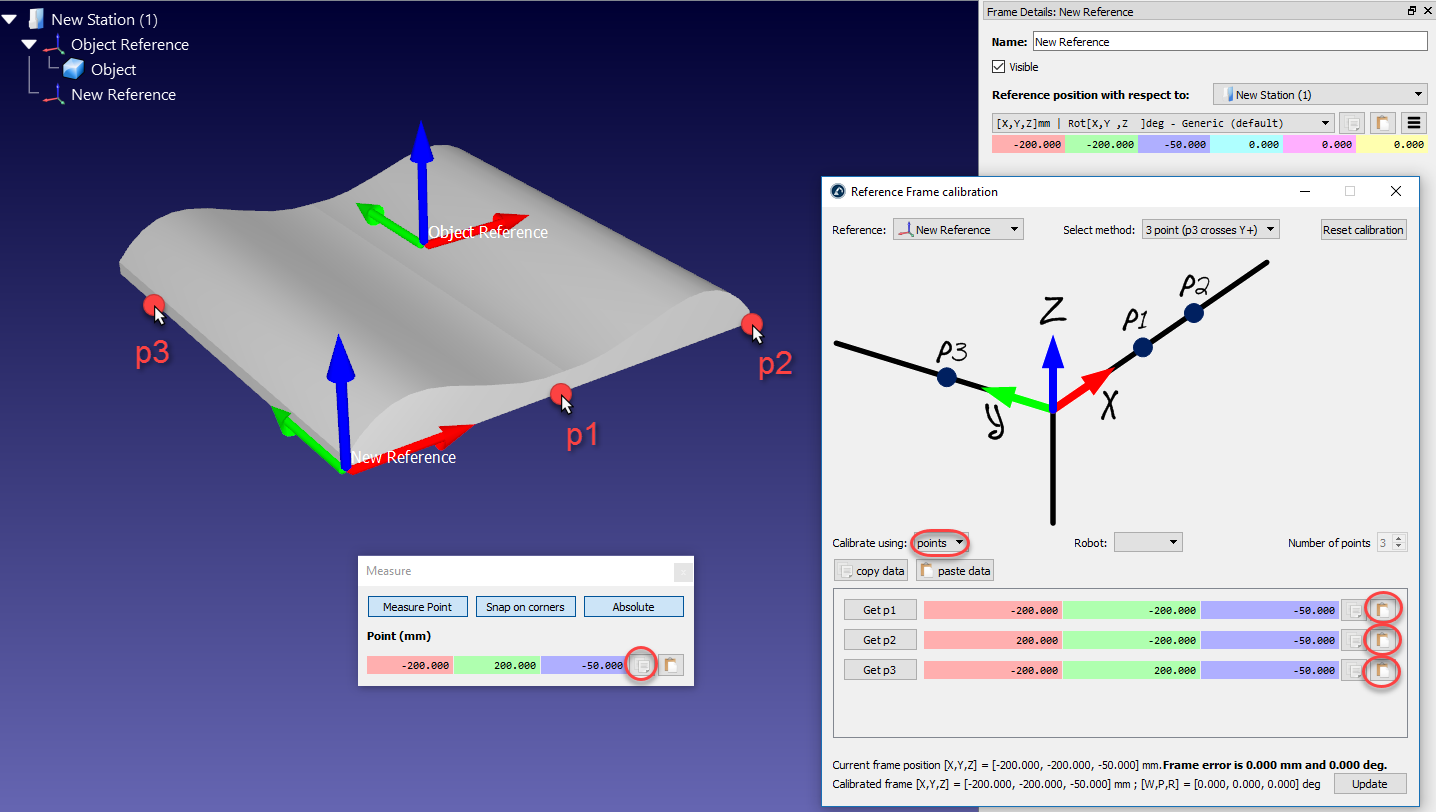
5.Sélectionner la méthode de calibration.
Par exemple : La méthode des 3 points (avec le 3ème point traversant l’axe Y+)
6.Sélectionner Etalonner en utilisant Points
7.Sélectionner Outils➔Mesure pour ouvrir l’outil de Mesure
8.Sélectionner le bouton Absolu, les points seront mesurés en rapport à la station (référence absolue)
9.Sélectionner 3 points sur l’objet virtuel (un par un) et entrer les dans la fenêtre de calibration du repère.
10.Sélectionner Mise à jour. Le repère devrait apparaitre à l’endroit désiré.
11.Cliquer droit sur l’objet et sélectionner Changement du support. Sélectionner le nouveau repère. La position absolue de l’objet ne changera pas. Cependant, la position relative de l’objet par rapport au nouveau repère sera correctement définie.
12.L’objet et sa propre référence sont prêts pour une programmation Hors-Ligne : Sélectionner et faire glisser le nouveau repère sur le repère du robot.