Aligner les références robots
Cette section explique comment deux robots ou plus peuvent être programmés hors-ligne tout en partageant un repère commun.
Dans une application typique de programmation hors-ligne, la position de l’objet est mise à jour par rapport au robot. Cependant, lorsque deux ou plusieurs robots sont utilisés pour la même application, la position de chaque robot doit être mise à jour par rapport à une référence commune (un objet de référence ou un repère commun).
Suivre ces étapes pour mettre à jour la position des robots par rapport à un repère :
1.S’assurer que les repères des robots et le repère de l’objet ne dépendent pas les uns des autres. S’il y a une dépendance, il faut attacher les repères à l’élément station.
2.Ajouter un nouveau repère attaché à chacun des repères de base du robot comme si vous alliez définir un nouveau repère individuel pour chaque robot (Real Ref. A et Real Ref. B).
Ce repère représentera l’emplacement réel de la pièce par rapport à chaque robot.
3.Calibrer chacun de ces repères (Real Ref. A et Real Ref. B) séparément, utilisant la Procédure standard de calibration. (méthode des 3 points par exemple)
Pour le moment, vous voyez 3 repères qui devrait être coïncident mais qui ne le sont pas. Le repère de chaque robot doit être mis à jour pour régler le problème :
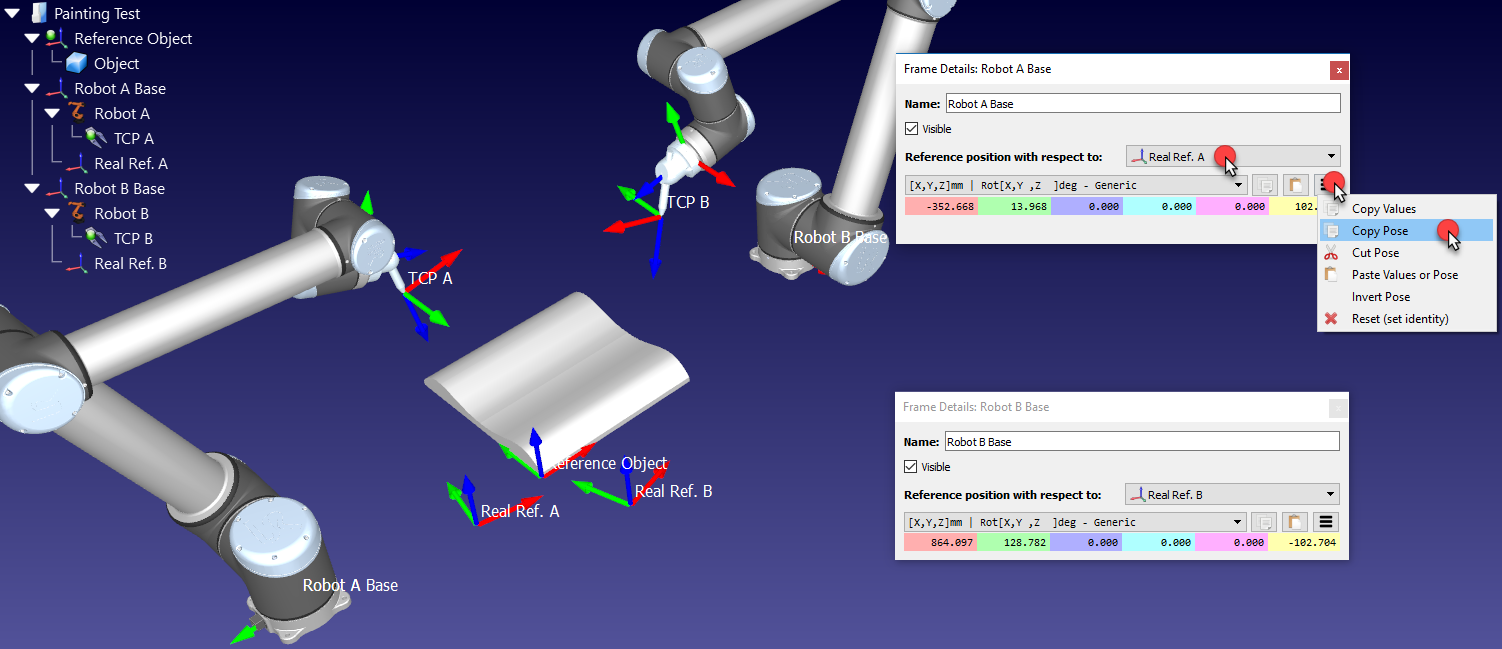
4.Double-cliquer sur l’un des repères robot, tel que la Robot A Base afin d’ouvrir la fenêtre de repère.
5.Copier la position du repère de la base robot en respectant le repère calibré de ce robot (Real Ref. A), en sélectionnant le bouton Copier.
6.Dans la même fenêtre, changer La position du repère par rapport à : choisir l’Objet de référence.
7.Coller la Position. Le robot va bouger et Real Ref. A sera coïncident avec Le repère de l’objet.
8.Répéter les étapes 4-7 de cette procédure pour les autres robots.
A la fin de cette procédure, tous les repères doivent correspondre et les relations entre toutes les références calibrées et les Objets de références doivent être les mêmes.