Le point central de l’outil du robot (Tool Center Point - TCP) est le point utilisé pour positionner le robot dans chaque programme robot définissant dans l’espace des cibles en coordonnées cartésiennes. Le TCP est défini comme une transformation à partir de la bride du robot. Définir un TCP juste et précis est important pour toutes les applications robotiques que ce soit de la programmation en ligne ou hors-ligne.
Suivre ces étapes pour définir ou calibrer un outil robot (TCP) :
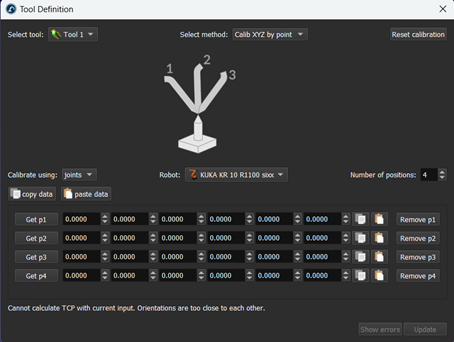
1.Sélectionner Utilitaires➔ Définir outils (TCP)
2.Sélectionner l’Outils pour le définir/calibrer. Sinon, faire un clic droit sur l’outil et choisir Définir Outil (TCP).
3.Sélectionner la méthode :
a.Calib XYZ par point : Toucher un point avec la pointe de l’outil TCP, en utilisant différentes orientations d’outils
b.Calib XYZ par plan : Toucher un plan avec le TCP, en utilisant différentes orientations d’outils. Le point TCP peut être un point ou une sphère.
Note : Toucher le même point avec différentes orientations. Cette méthode est disponible sur presque l’ensemble des « teach pendants » des robots. L’utilisation de RoboDK permet d’avoir une meilleure idée des erreurs de calibration TCP.
Note : Si le centre d’une sphère a besoin d’être calculé, il est recommandé d’utiliser un plan pour calculer le TCP. Cette méthode récupère automatiquement le centre de la sonde tactile.
4.La calibration/étalonnage TCP utilise les valeurs des joints par défaut. Changer-le à Poses si vous avez une cible en coordonnées Cartésienne.
Important : Si le TCP est défini à l’aide de poses, la position de la bride du robot doit être définie en tant que pose (position et orientation), par rapport à la base du robot ou au repère de référence. De plus amples renseignements sur la façon de définir ces valeurs se trouvent dans la section Repère de référence.
Astuce : Il est possible d’utiliser plus de 3 ou 4 configurations pour définir ou étalonner correctement le TCP. Cela permet d’obtenir un résultat plus précis et définit une bonne estimation de l’erreur TCP. Il est recommandé d’utiliser 8 points ou plus pour définir un TCP avec précision, ou 3 points si la précision n’est pas importante.
5.Sélectionner le robot si plus d’un robot est disponible.
6.Ajuster le nombre de points que vous voulez utiliser pour calibrer le TCP. Cette valeur peut être modifié plus tard.
7.Commencer à remplir le tableau avec la configuration de mesure sélectionnée (valeurs des joints ou position et orientation de la bride).
Astuce : La liste des configurations peut être remplie manuellement ou en utilisant copier/coller (bouton à droite des lignes)
Important : Il est recommandé de définir chaque valeur de joint avec une précision de 4 chiffres après la virgule. La quantité de chiffre décimal accepté peut être modifié Outils➔Options➔Précision➔Décimales Max.
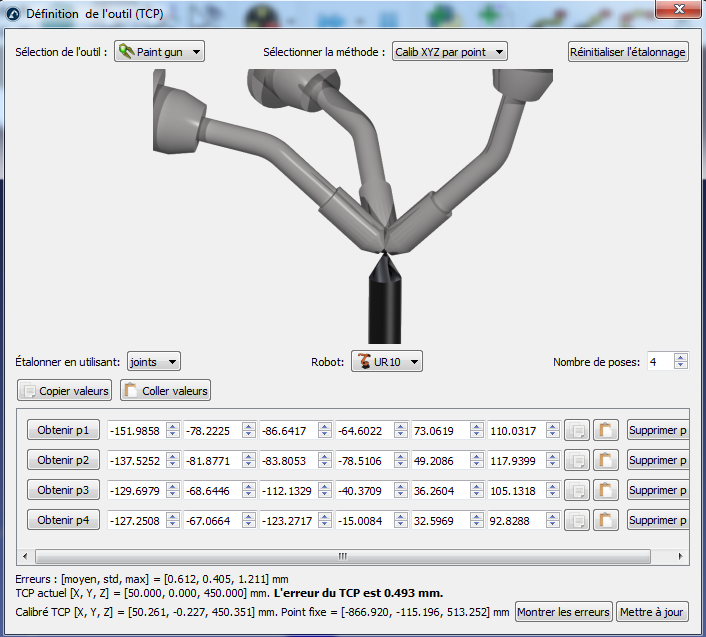
Astuce : Il est aussi possible de sélectionner Obtenir p1 pour récupérer la valeur de joint depuis le robot vers RoboDK. Si le driver a été correctement configuré, il est très facile de récupérer les coordonnées sur le PC. Plus d’information dans la section Robot Drivers.
Important : Il est recommandé de garder une copie séparée des valeurs obtenues. Sélectionner Copier Valeurs et Coller valeurs afin de copier/coller tout le contenu.
8.Finalement, sélectionner Mettre à jour pour appliquer la nouvelle position de l’outil sélectionné dans RoboDK.
Note : Le nouvel outil (TCP) est calculé automatiquement une fois que les valeurs ont été entrées.
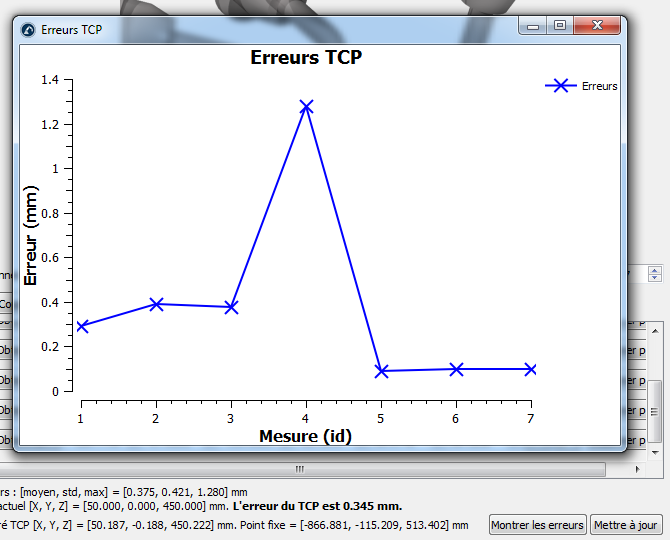
Astuce : Quelques statistiques d’erreur utiles sont définies comme l’erreur moyenne, l’écart-type (std) et l’erreur maximale. Sélectionner Montrer les erreurs pour afficher un graphique avec les erreurs pour chaque point par rapport à la moyenne calculée. Puisque cette méthode implique beaucoup d’opérations manuelles, il est courant d’introduire des erreurs dans des points spécifiques. Pour isoler ces erreurs, nous pouvons supprimer les points qui présentent une erreur plus importante que la moyenne.
Comme exemple, l’image suivante montre les erreurs avant que le point 4 ne soit supprimé en utilisant l’option Supprimer p4.