La section précédente Définir un repère décrit deux façons d’étalonner la position d’une table tournante par rapport à un robot. L’étalonnage/identification de la table tournante peut être effectué à l’aide du robot avec un outil correctement défini ou avec un système de mesure (tel qu’un pointeur laser).
Vous devez récupérer la position d’un point sur la plaque tournante plusieurs fois, pendant que vous déplacez les axes de la plaque tournante. RoboDK prend en charge l’étalonnage des platines 1 et 2 axes.
Important : Définir correctement le TCP avant d’identifier le repère (sauf si vous utilisez des points mesurés à partir d’un système de mesure externe). Ceci est important car le repère est identifié à l’aide de la cinématique robot. Cela s’applique également si vous récupérez des points du robot avec un teach pendant. Toute erreur d’étalonnage de l’outil (TCP) sera transférée pendant la calibration de la position de la plaque tournante.
Calibrer une table tournante 1 axe
Suivre les étapes suivantes pour calibrer une table tournante 1 axe :
1.Sélectionner Utilitaires➔ Définir Repère
2.Sélectionner le repère à définir/calibrer. Sinon faire un clic droit sur le repère et choisir Définir Repère.
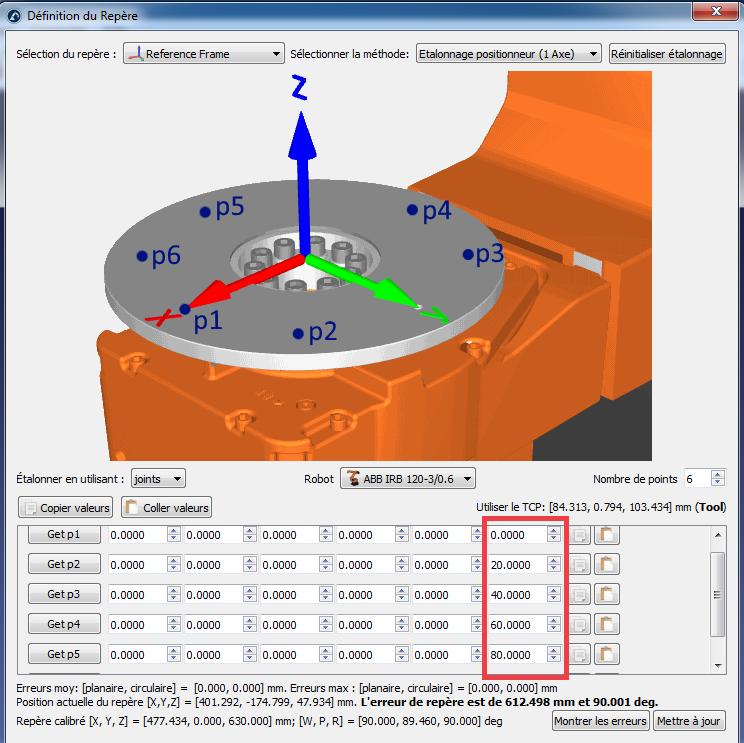
3.Sélectionner la méthode Etalonnage positionneur (1 axe)
4.Sélectionner l’étalonnage en utilisant Joints (par défaut). Changer à points si vous avez la position XYZ de chaque point par rapport à la base du robot.
5.Spécifier le robot si plus d’un robot est disponible dans la station.
6.Sélectionner le nombre de points que vous souhaitez prendre. (Le minimum étant 3).
Important : Sonder le même point de la plaque tournante, avec le robot, au fur et à mesure que vous déplacez la plaque tournante. La plaque tournante doit être déplacée dans le sens positif de la rotation (comme le montre l’image précédente). Il est recommandé d’utiliser un minimum de 6 à 10 points pour mieux comprendre les erreurs impliquées dans le déplacement de la platine.
Important : Le premier point va définir l’axe X de la table tournante (référence statique)
Important : Le plan XY de la calibration du repère va correspondre avec le plan décrit par un arc/cercle. Ajuster ce réglage si vous n’avez pas pris de points sur ce plan. Par exemple, il est possible d’ajouter un nouveau repère imbriqué au repère de référence afin de représenter le pied de la table tournante.
7.Commencer à remplir le tableau avec des valeurs de Joints ou Points.
Astuce : La liste de configurations peut être remplie manuellement ou en utilisant l’option copier/coller.
Astuce : Si vous êtes connecté au robot, sélectionner le bouton Get p afin de récupérer les valeurs du robot. Plus d’information pour régler cette option dans la sectionRobot Drivers. Cette option n’est pas disponible pour tous les robots et peut demander des logiciels supplémentaires vendu par le fabriquant robot.
Important : Si vous entrez les valeurs manuellement, il est recommandé de définir des valeurs avec une précision à 4 chiffres après la virgule. Modification possible du nombre décimal dans Outils➔Options➔Précision➔Joints max digit.
Note : RoboDK gardera une copie des données apportées dans la station une fois que vous aurez mis à jour.
8.Finalement, sélectionner Mettre à jour afin d’appliquer la nouvelle position du repère sélectionné dans la station.
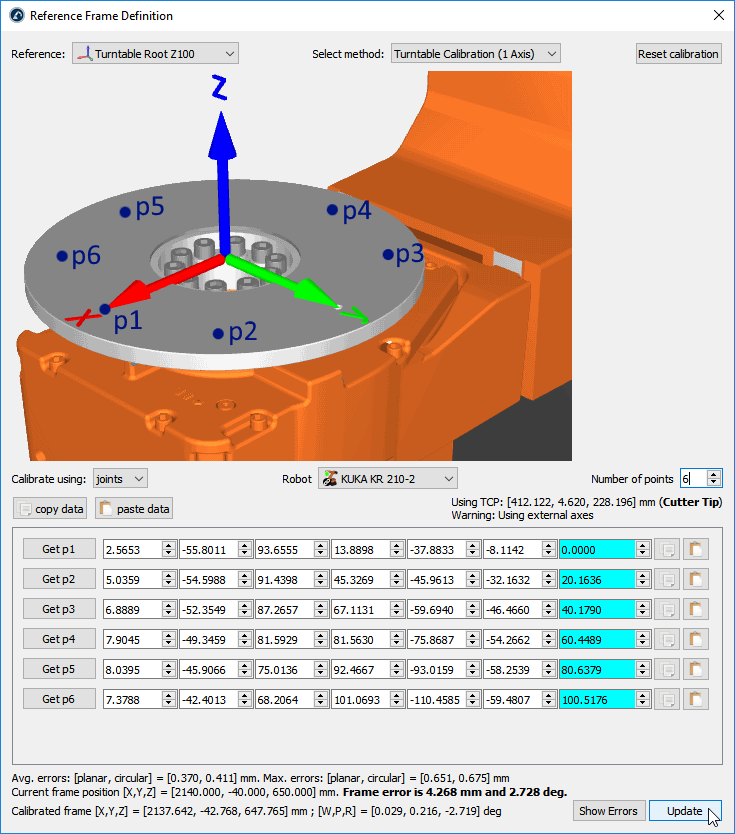
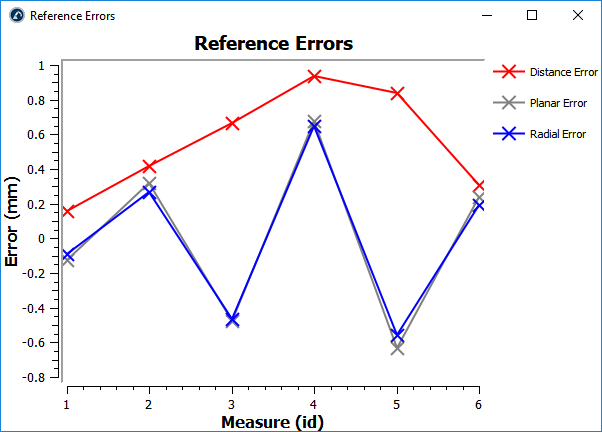
9.Sélectionner Montrer les erreurs pour afficher le niveau d’erreur pour chaque point (l’erreur de distance est équivalent à une erreur plan et radial combiné).
Calibrer une table tournante 2 axes
Suive cette procédure pour calibrer une table tournante 2 axes.
1.Sélectionner Utilitaires➔ Définir Repère
2.Sélectionner le repère à définir/calibrer. Sinon, faire un clic droit sur le repère et Définir Repère.
3.Sélectionner la méthode Etalonnage positionneur (2 Axes)
4.Sélectionner Etalonner en utilisant Joints (Par défaut). Vous pouvez le changer à Points si vous avez les coordonnées XYZ de chaque point dans le repère du robot.
5.Spécifier le robot si plus qu’un robot est disponible dans la station.
6.Sélectionner le nombre de points que vous souhaitez prendre (minimum est 6 points, 3 points par axe).
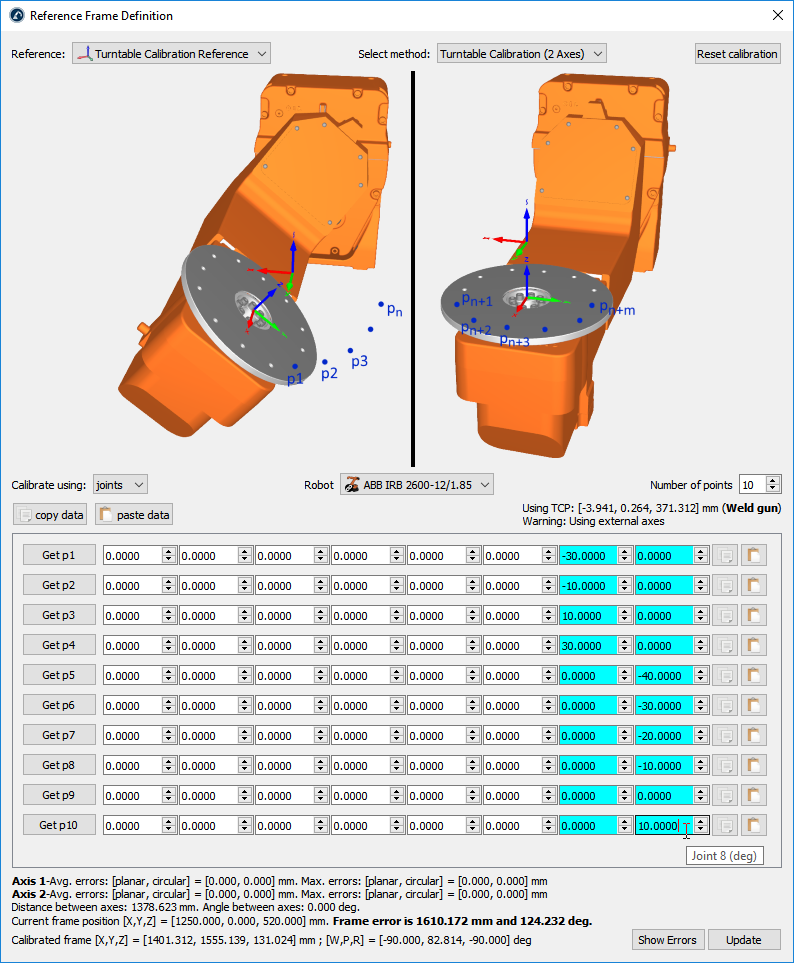
Important : Vous devez sonder le même point de la plaque tournante, avec le robot, lorsque vous déplacez la plaque tournante. La plaque tournante doit être déplacée dans le sens positif de la rotation pour chaque axe. Il faut d’abord déplacer l’axe 1, puis l’axe 2 (comme sur l’image précédente). Il est recommandé d’utiliser un minimum de 12 à 20 points pour mieux comprendre les erreurs impliquées dans le déplacement de la platine.
Note : Le nombre de points nécessaire pour identifier l’axe 1 ne doit pas forcement correspondre au nombre de points pour identifier l’axe 2 (Par exemple, utiliser 4 points pour l’axe 1 et 6 points pour l’axe 2).
Important : L’axe Z de la référence étalonnée correspondra à l’axe 2. L’axe X de la référence étalonnée correspondra à la normale commune. De plus, l’origine de la référence étalonnée sera placée à l’intersection entre l’axe 2 et la normale commune (point sur l’axe 2 le plus proche de l’axe 1).
7.Commencer à remplir la table avec les positions robot Joints. (ou points).
Astuce : La liste des configurations peut être remplie manuellement ou en utilisant les boutons copier/coller.
Astuce : Si vous êtes connecté au robot, sélectionner le bouton Get p afin de récupérer les valeurs du robot. Plus d’information pour régler cette option dans la sectionRobot Drivers. Cette option n’est pas disponible pour tous les robots et peut demander des logiciels supplémentaires vendu par le fabriquant robot.
Important : Si vous entrez les valeurs manuellement, il est recommandé de définir des valeurs avec une précision à 4 chiffres après la virgule. Modification possible du nombre décimal dans Outils➔Options➔Précision➔Joints max digit.
Note : RoboDK gardera une copie des données apportées dans la station une fois que vous aurez mis à jour.
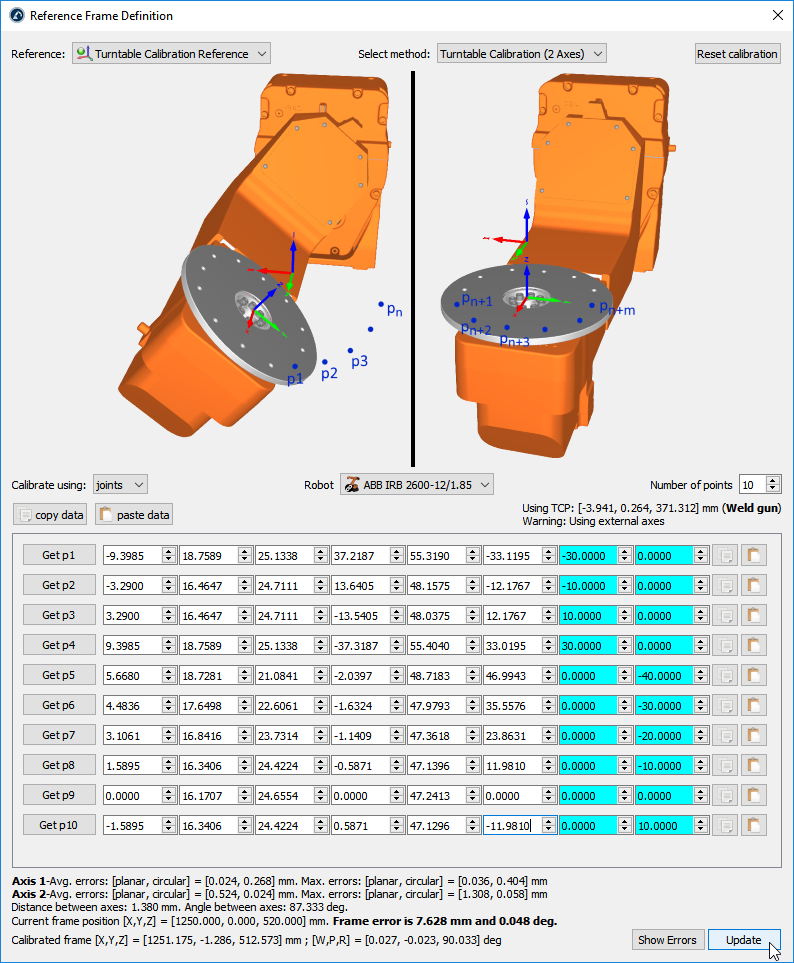
8.Pour finir, sélectionner Mettre à jour afin d’appliquer la nouvelle position au repère sélectionné dans la station.
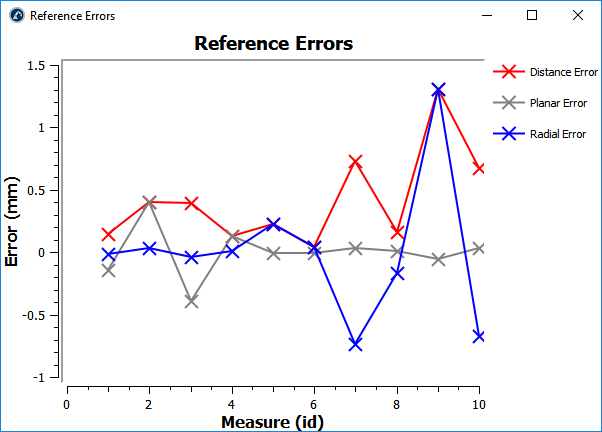
9.Sélectionner Montrer les erreurs pour afficher le niveau d’erreur pour chaque point (l’erreur de distance est équivalent à une erreur plan et radial combiné).