Créer un Mécanisme ou un Robot
Créer de nouveaux mécanismes ou robots dans RoboDK en suivant les étapes suivantes :
1.Sélectionner Utilitaires➔Modéliser un robot ou mécanisme
2.Sélectionner le type de mécanisme ou robot que vous souhaitez créer
3.Sélectionner le système de coordonné représentant l’origine du système.
4.Sélectionner un objet pour chaque joint (partie en mouvement du mécanisme ou robot).
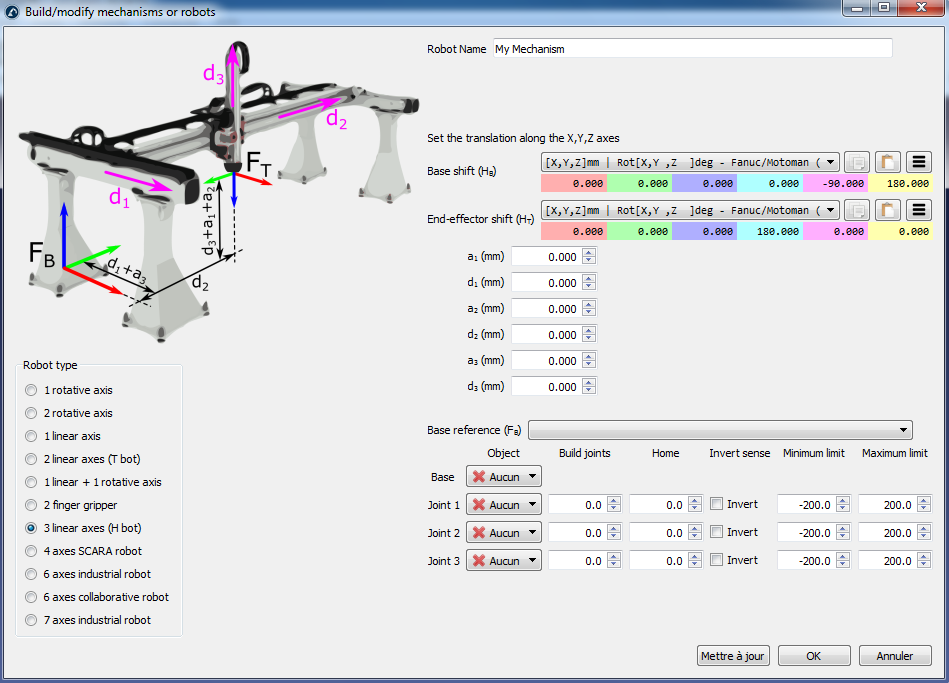
5.Entrer les paramètres robot tel que décrit dans l’image correspondante
6.Sélectionner Mettre à jour pour voir le nouveau mécanisme.
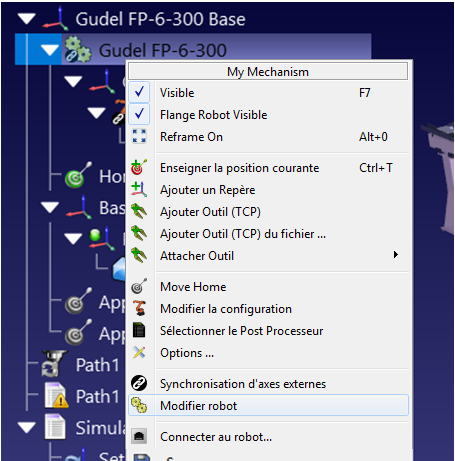
Modifier le mécanisme existant en faisant un clic droit sur la ligne robot dans l’arbre de la station et sélectionner Modifier Robot. Cette option est disponible pour les robots et mécanisme que vous avez créé.
Dans RoboDK, il est possible de créer les types de mécanisme suivants :
●Un axe rotatif (une table tournante ou un préhenseur)
●Deux axes rotatif (par exemple : un positionneur 2 axes)
●Un axe linéaire (tel qu’un rail)
●Deux axes linéaire (tel qu’un T-bot)
●Trois axes linéaire (tel qu’un H-bot)
●Un axe linéaire + un axe rotatif
●Préhenseur à 2 doigts
●Scara robots (4 axes)
●Robot 6 axes
●Robot 7 axes
Comment modéliser une table tournante 1 axe
Cette section montre comment modéliser une table tournante à 1 axe. Les tables tournantes sont souvent utilisées pour des applications d'usinage robotique.
Suivez ces étapes pour créer une table tournante :
7.Chargez les modèles 3D de la table tournante : faites glisser et déposez les modèles 3D dans la fenêtre RoboDK (fichiers STL, STEP ou IGES).
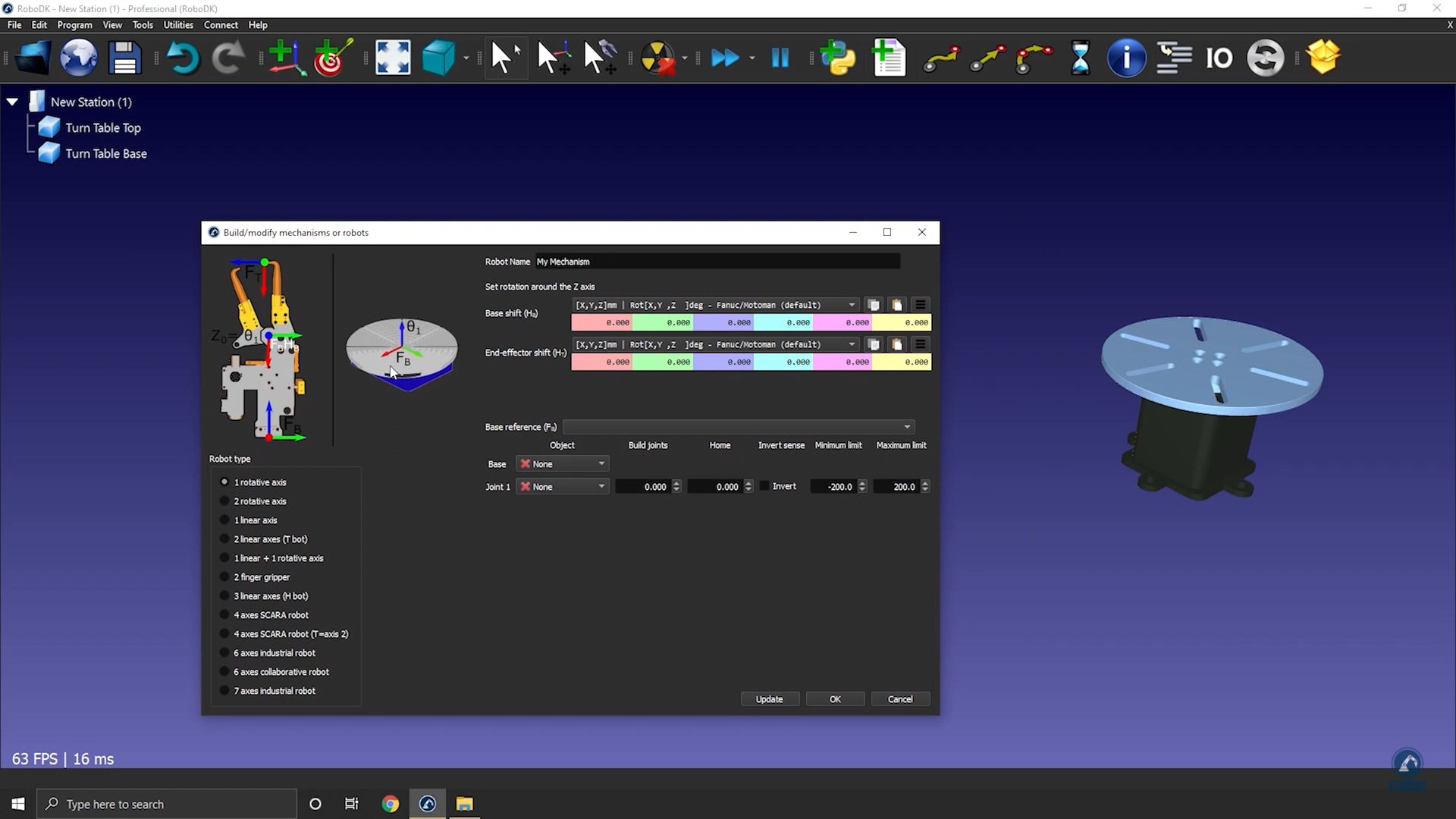
8.Sélectionnez Utilitaires→Modéliser un robot ou mécanisme.
9.Sélectionnez 1 axe rotatif.
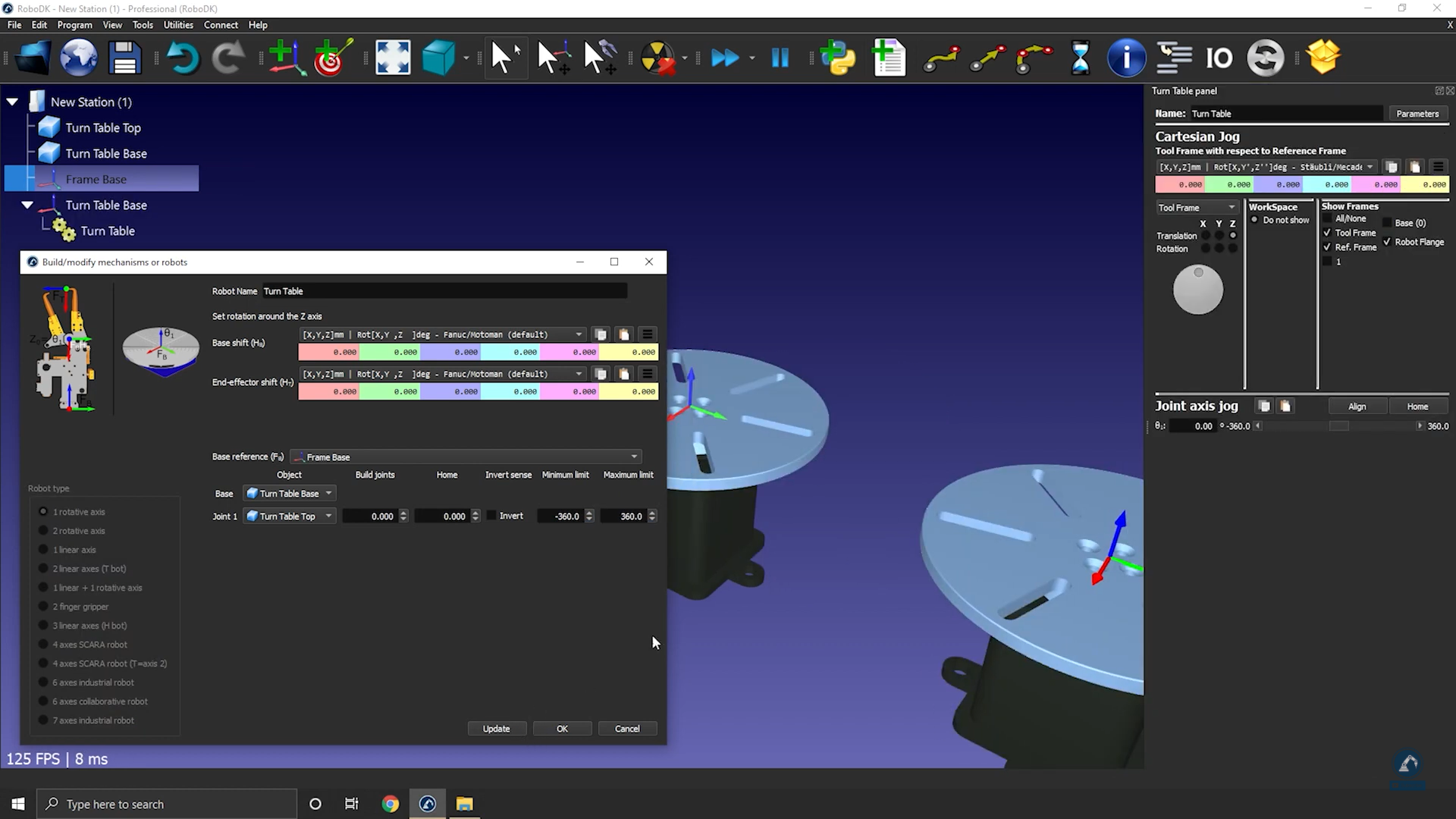
10.Si vous regardez l'image, elle devrait vous montrer comment la base et le plateau supérieur doivent être positionnés. Dans le cas d'un axe rotatif, le mécanisme tournera autour de l'axe Z de Fb (Frame Base).
11.Renommez votre mécanisme en TurnTable.
Définissez la référence de votre table tournante en créant un nouveau système de coordonnées :
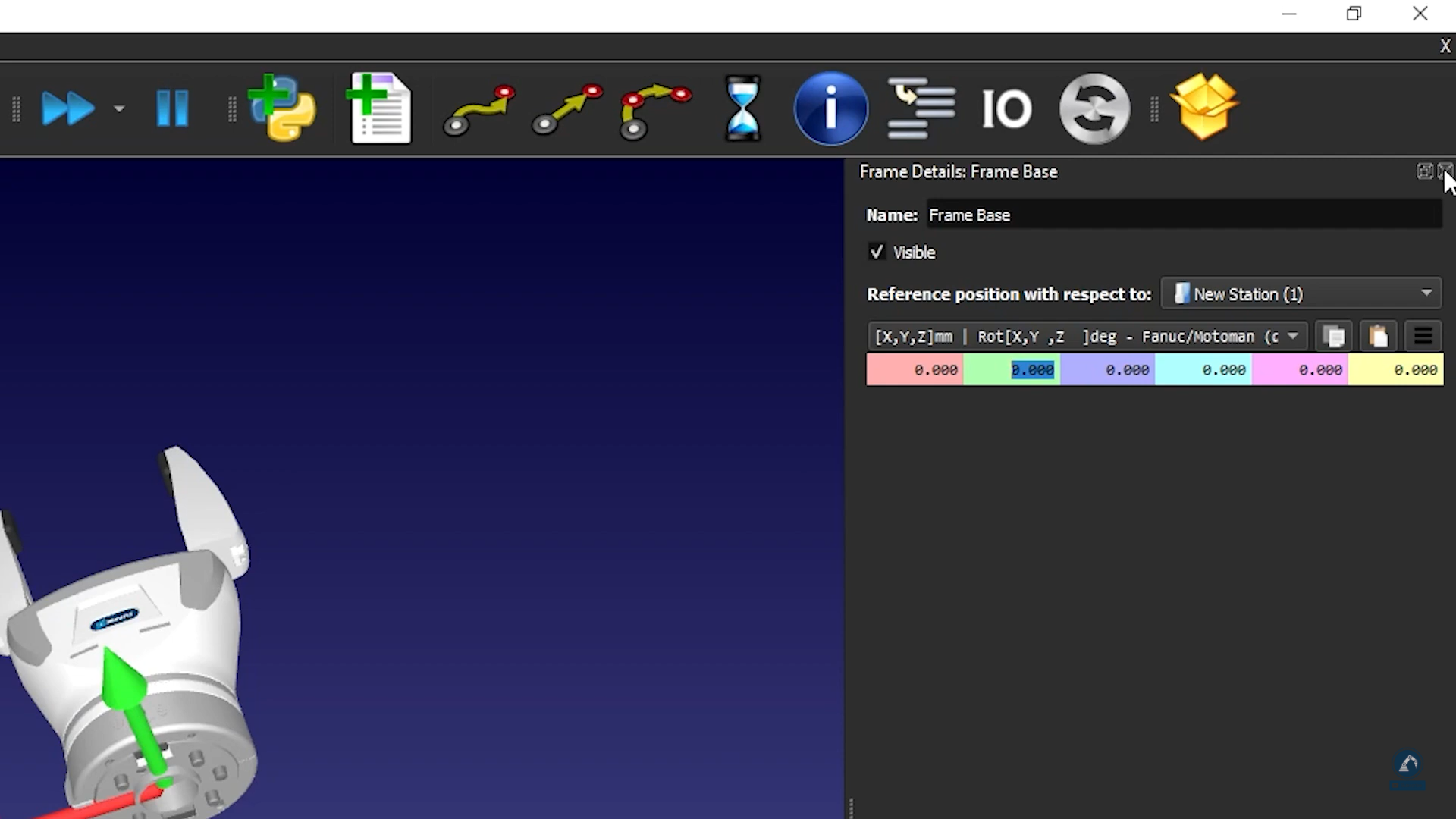
12.Créez un repère et sélectionnez F2 pour le renommer en Frame Base.
13.Modifiez la position du repère en ouvrant le panneau du repère (Frame Panel).
14.Sélectionnez Outils puis Mesure.
15.Mesurez la position de la surface en cliquant sur le mécanisme ; vous pouvez voir la différence entre l'origine et le centre. Vous pouvez copier les valeurs et les coller comme indiqué dans l'image ci-dessous.
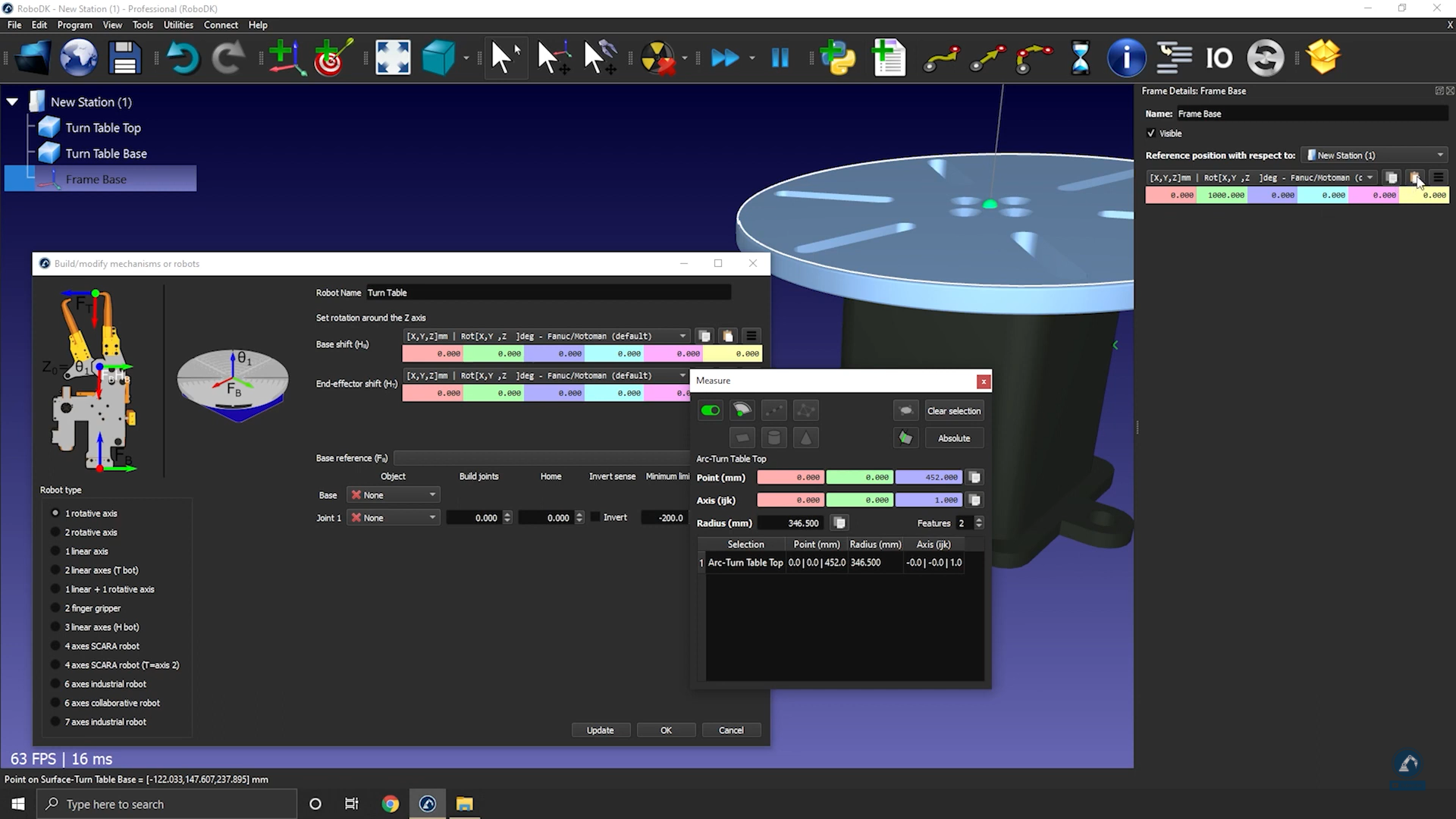
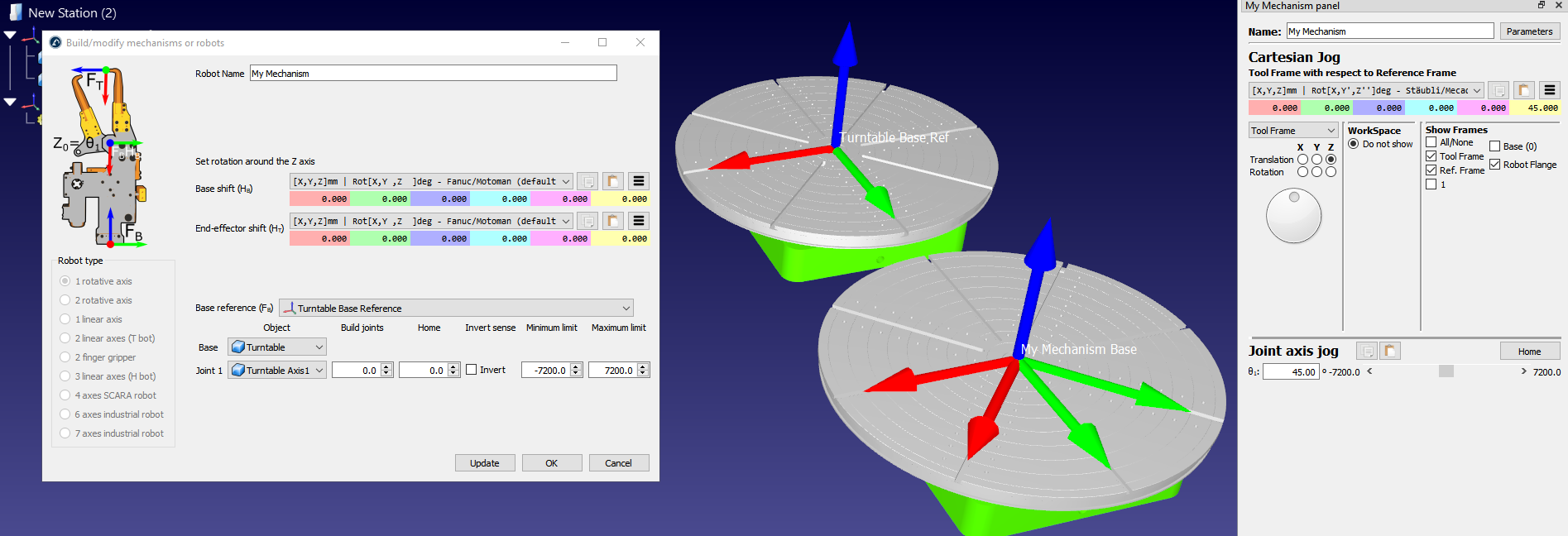
La position du repère devrait maintenant correspondre à la référence de l'image. Le repère et les éléments objets devraient être remplis automatiquement. Si la sélection automatique n'est pas correcte, vous pouvez la mettre à jour en conséquence.
16.Vous pouvez mettre à jour les limites de l'articulation, par exemple, si vous souhaitez avoir +/-20 tours, vous pouvez saisir +/-7200 deg. Vous pouvez également modifier les limites de l'articulation plus tard en double-cliquant sur les étiquettes de limite d'articulation du panneau du robot.
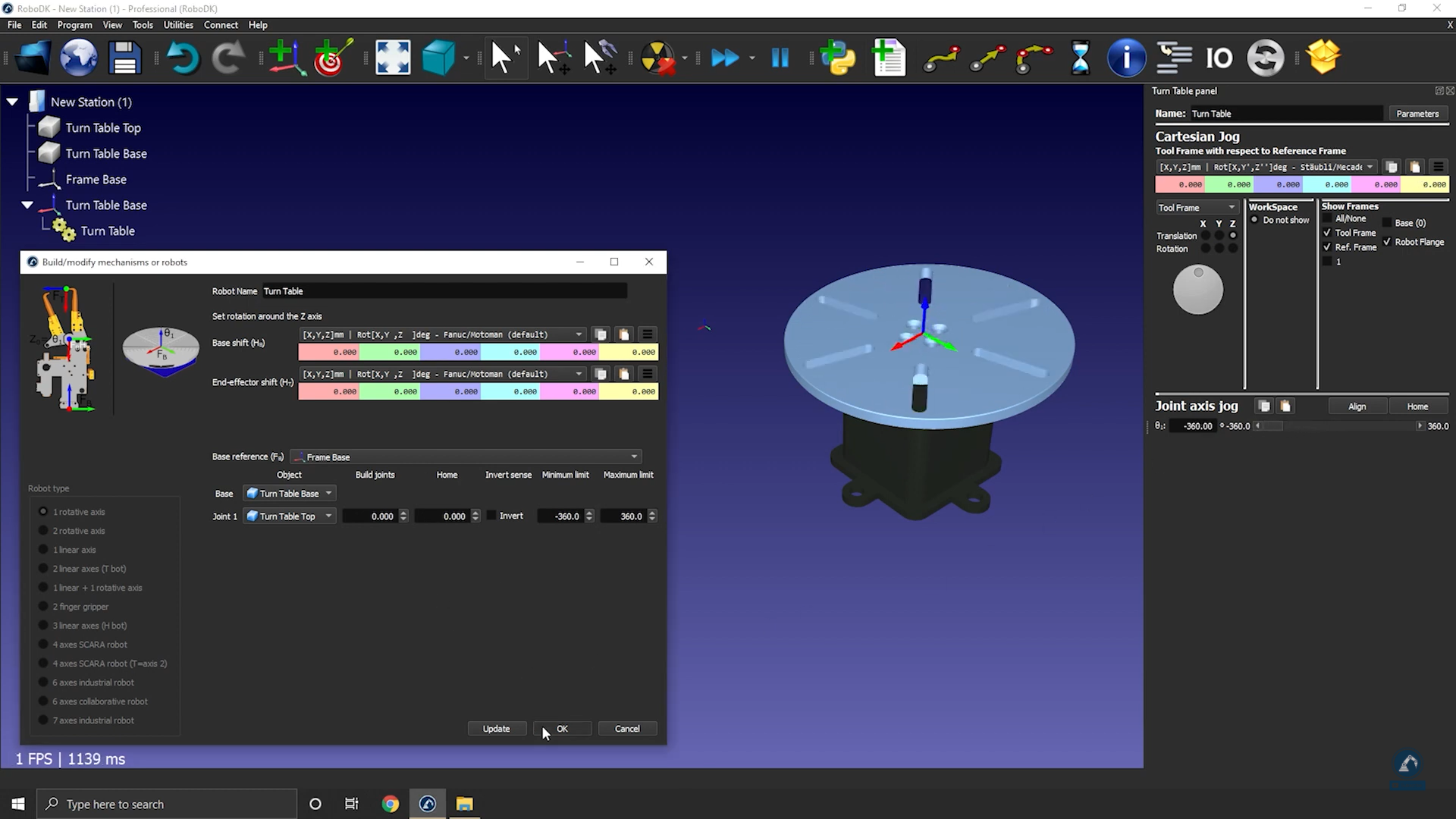
17.Sélectionnez Mettre à jour pour générer le mécanisme : le nouveau mécanisme apparaîtra.
18.Vous pouvez sélectionner OK pour fermer le menu ou apporter des modifications supplémentaires à votre table tournante si nécessaire.
19.Vous pouvez supprimer les fichiers d'objet d'origine que vous avez utilisés pour créer le mécanisme. Le mécanisme sera enregistré avec votre projet RDK et ne nécessite aucune dépendance externe.
20.Une fois que vous avez testé votre table (assurez-vous qu'elle se déplace dans la bonne direction et que les limites correspondent à ce que vous attendiez), vous pouvez sélectionner OK dans la fenêtre du modèle de mécanisme pour la fermer.
Comment modéliser un rail linéaire 1 axe
Cette section montre comment modéliser un rail linéaire 1 axe, également appelé axe linéaire ou glissière linéaire. Un rail linéaire permet d’étendre la portée des bras robot.
Vidéo : Comment construire un rail linéaire 1 axe : https://www.youtube.com/watch?v=KTRDmHTOy0M.
Suivre les étapes suivantes afin d’importer votre modèle 3D :
21.Faire glisser et déposer votre modèle 3D dans RoboDK afin d’importer les objets dans votre station (les formats de fichiers acceptés incluent le STEP, l’IGES ou le STL, qui sont des formats 3D courants).
Suivre les étapes suivantes afin d’ouvrir l’assistant de création de mécanisme :
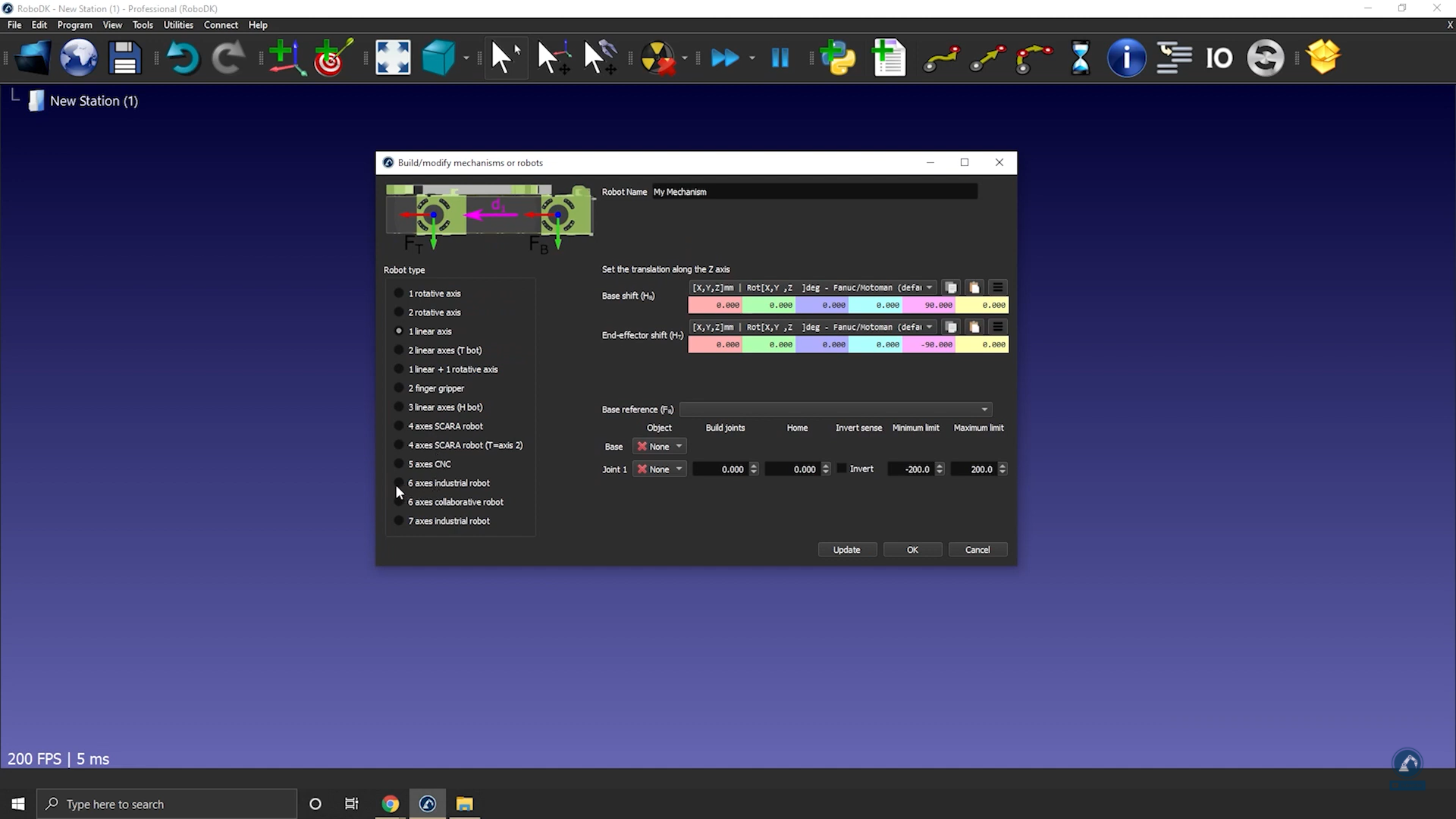
22.Sélectionner Utilitaires➔Modéliser un robot ou mécanisme.
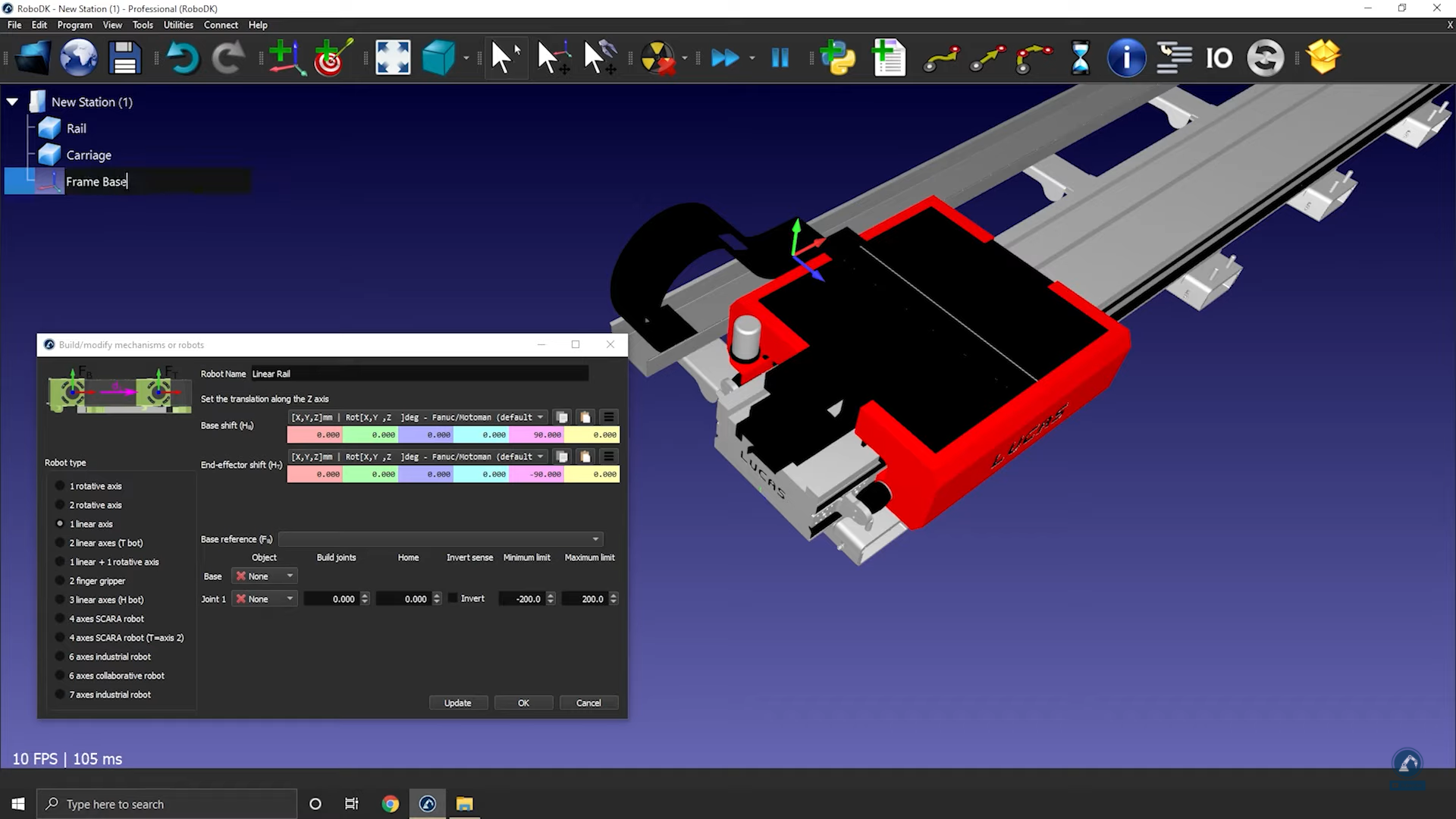
23.S’assurer que 1 axe linéaire est sélectionné sous « Type de robot ».
24.Si votre modèle 3D est groupé en une seule pièce, vous pouvez le diviser directement dans RoboDK.
Note : Pour diviser votre objet en 2 pièces et changer la couleur de votre modèle, vous pouvez suivre les étapes décrites dans la section sur la modélisation d’un robot 6 axes.
Suivre les étapes suivantes afin de positionner votre repère de base :
25.Maintenant que les objets sont chargés, rouvrir l’assistant de mécanisme Utilitaires➔Modéliser un robot ou mécanisme.
26.Vous pouvez renommer votre mécanisme dans Robot Name.
27.Considérer que votre repère de base doit se trouver à la position 0 du rail : créer un repère à cet endroit et le nommer Frame Base.
Suivre les étapes suivantes afin de modifier la position du repère :
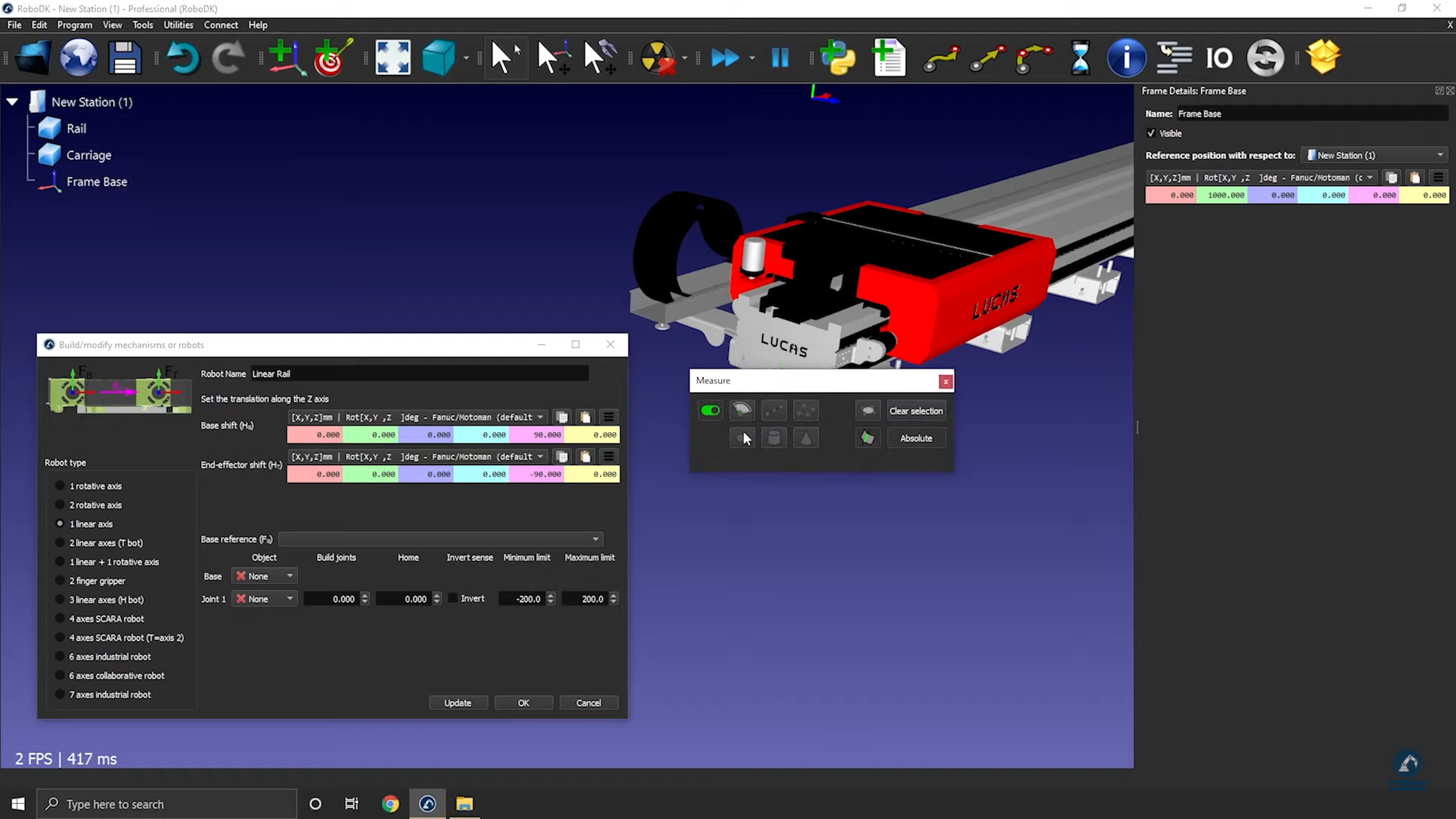
28.Sélectionner Outils➔Mesure.
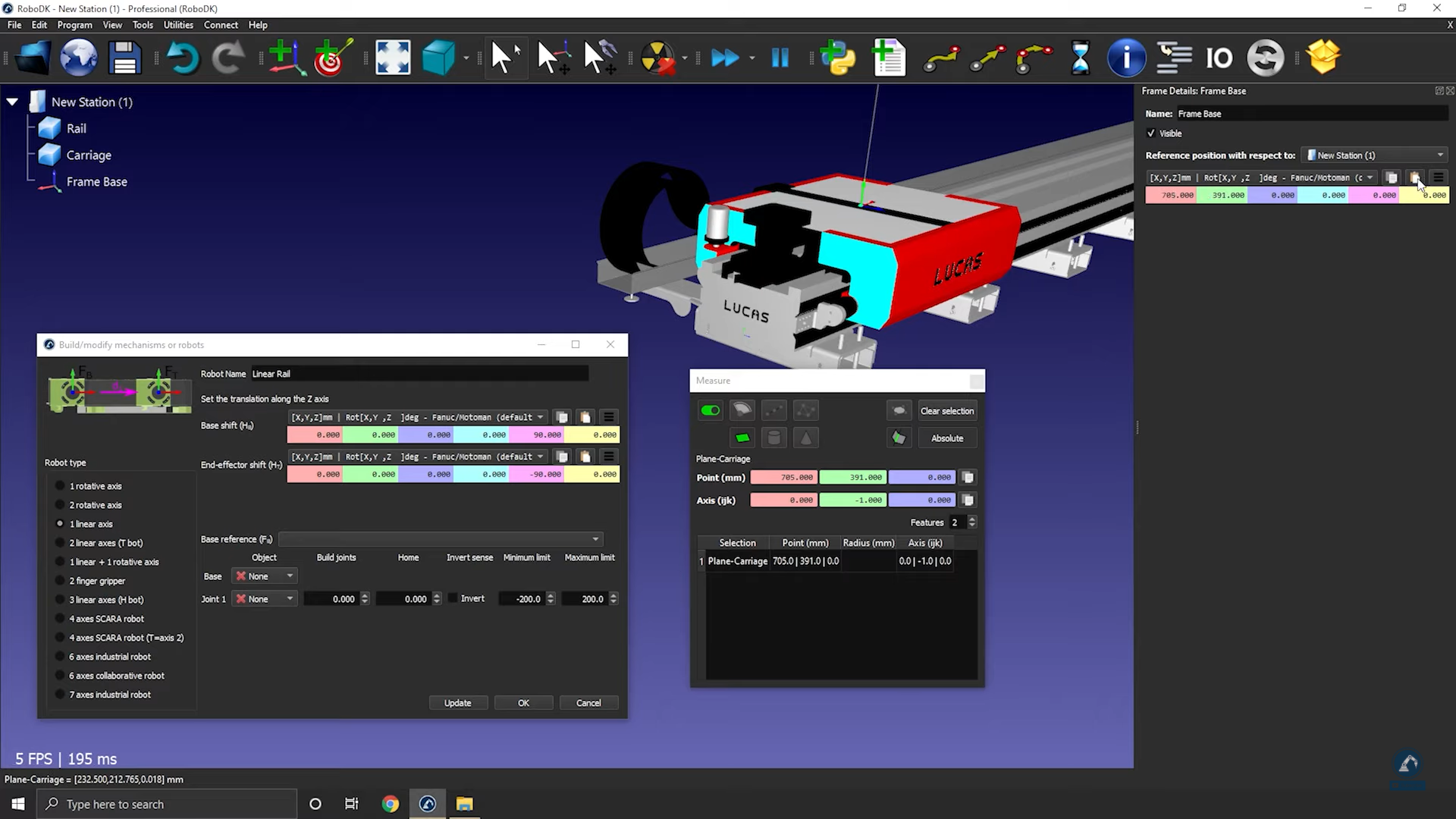
29.Utiliser l’outil de mesure pour mesurer la position de la surface en sélectionnant l’icône (comme indiqué dans l’image ci-dessous).
30.Copier les valeurs et les coller dans Frame Details : Frame Base (comme indiqué dans l’image ci-dessous).
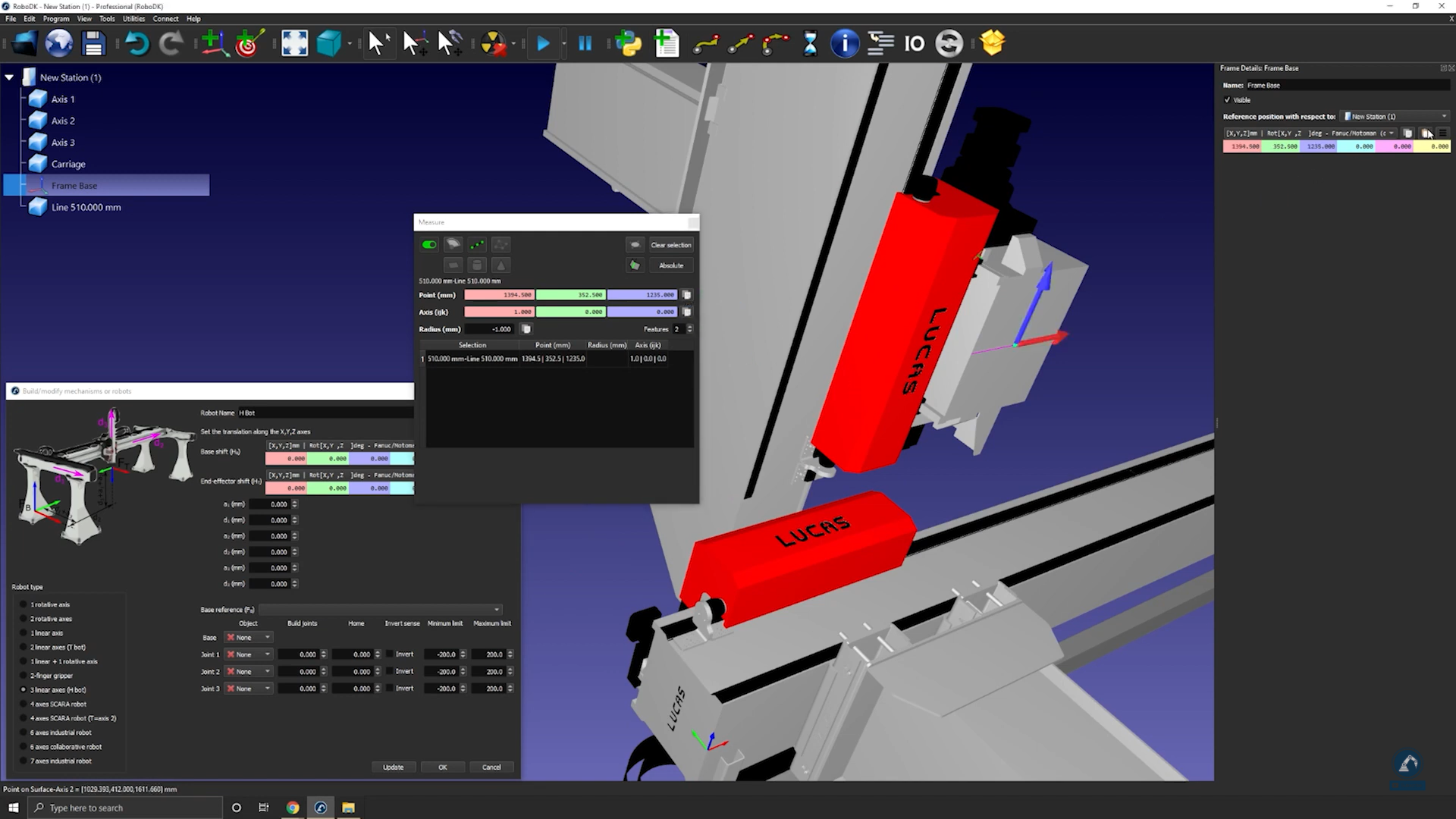
Suivre les étapes suivantes afin de vérifier les orientations et de saisir la longueur du rail :
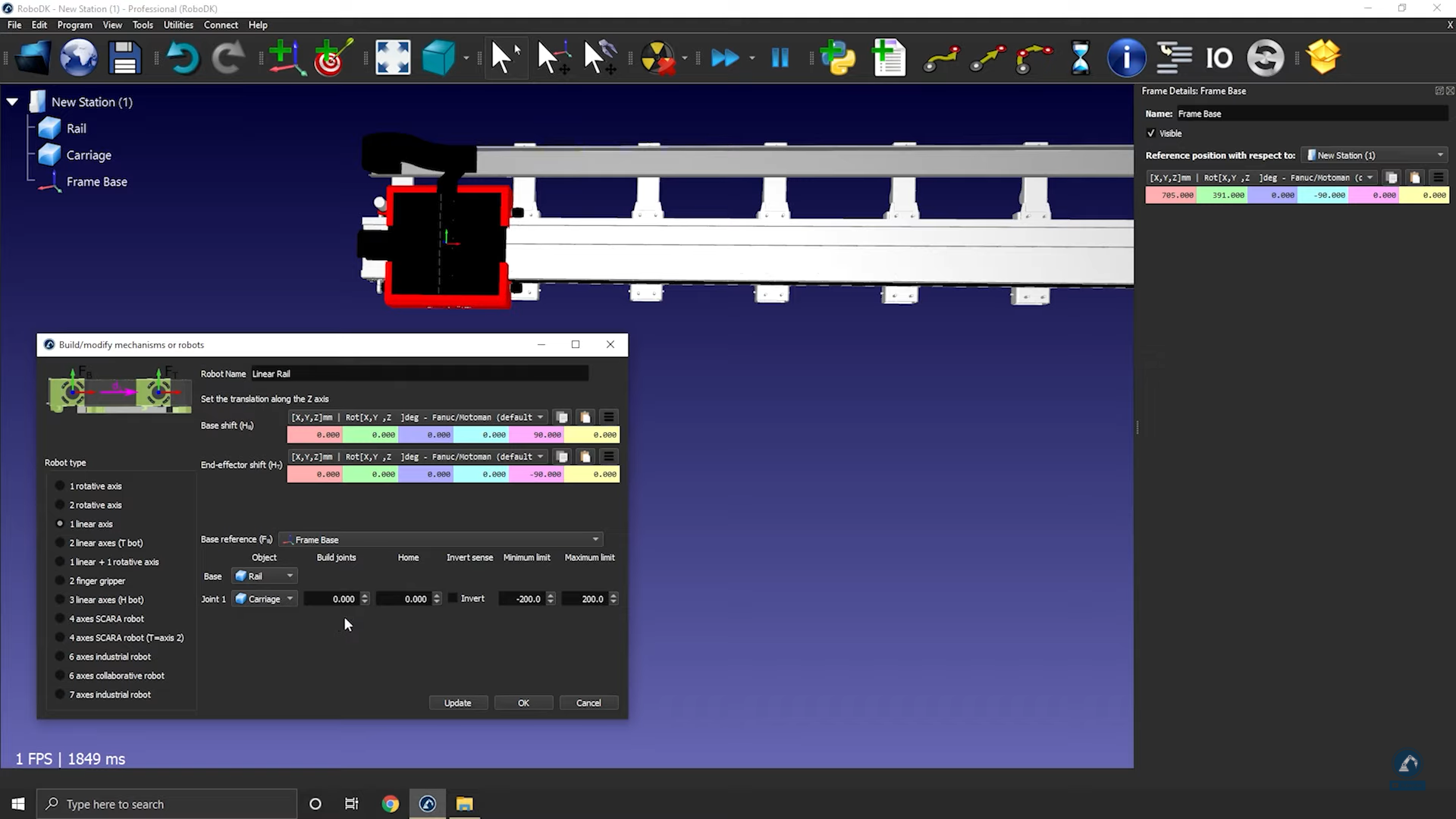
31.Effectuer une rotation de 90 degrés dans le sens horaire autour de X : saisir la valeur -90,000 degrés dans la fenêtre de position de référence.
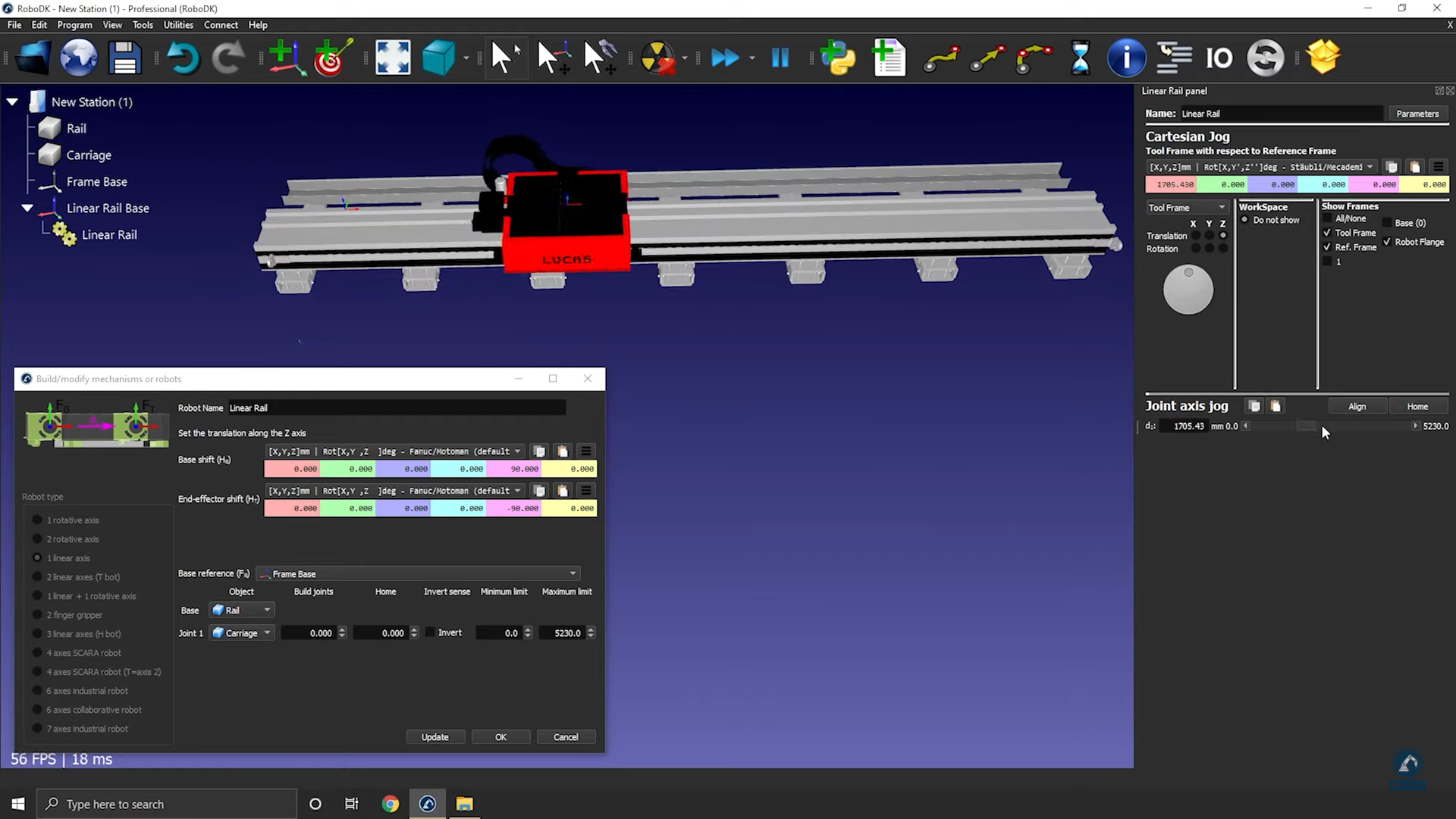
32.Saisir la longueur du rail dans la fenêtre de modélisation du mécanisme (comme indiqué dans l’image ci-dessous).
33.Sélectionner Mettre à jour afin de créer le robot.
34.Vous pouvez tester le rail (vérifier que les limites sont correctes et qu’il se déplace dans la bonne direction) en utilisant le Joint Axis Jog.
35.Sélectionner OK lorsque vous êtes satisfait du résultat.
Comment modéliser un rail linéaire 2 axes
Cet exemple montre comment modéliser un rail linéaire 2 axes, également appelé axes linéaires ou glissière linéaire. Les axes linéaires sont utilisés pour étendre la portée des bras robot.
Vidéo : Comment construire un rail linéaire 2 axes : https://www.youtube.com/watch?v=7_8yPS7SV2s.
Suivre les étapes suivantes afin de configurer votre modèle 3D dans RoboDK :
36.Importer votre modèle 3D dans RoboDK en faisant glisser et déposer le fichier STEP dans votre station.
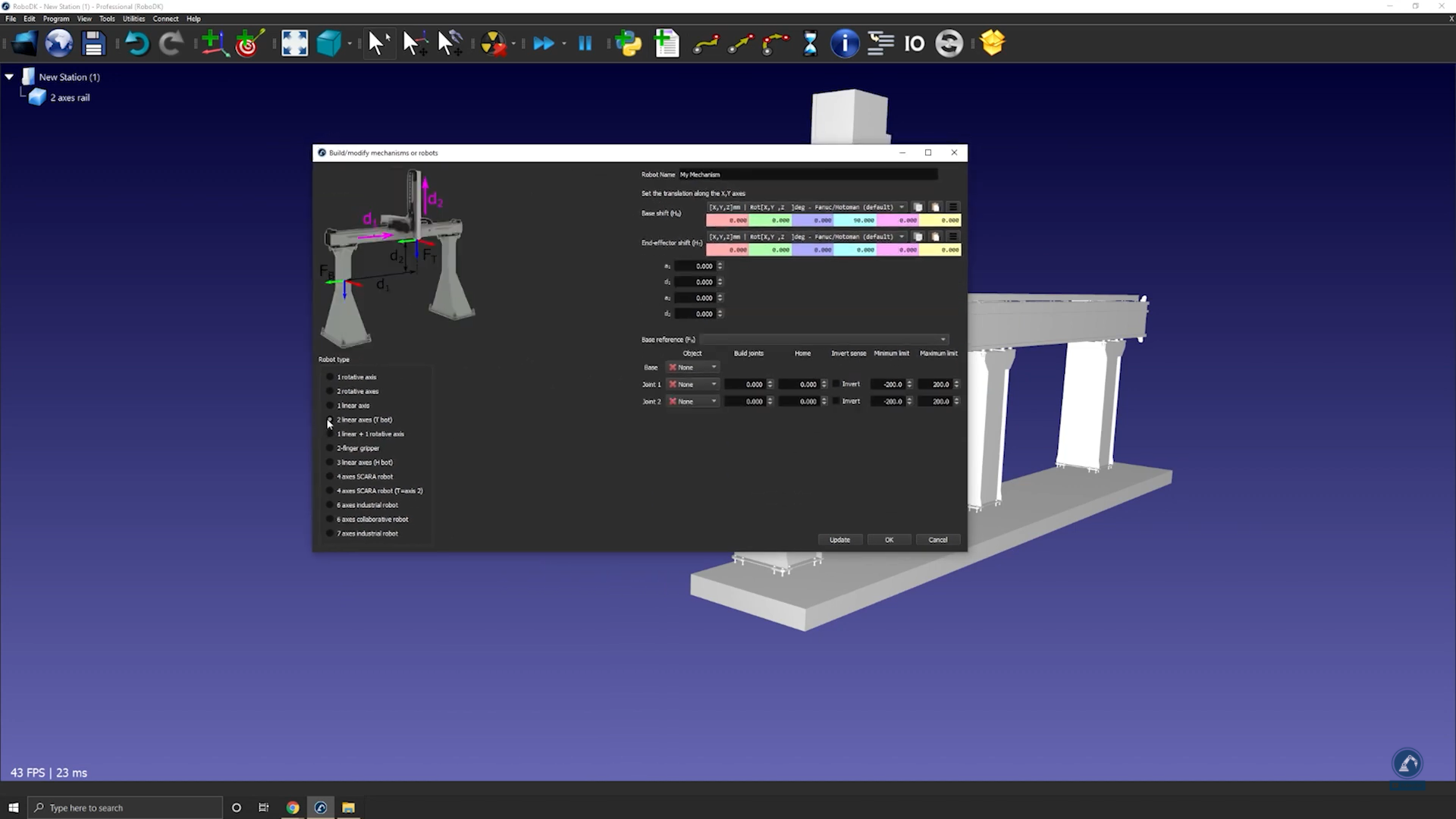
37.Ouvrir l’assistant de mécanisme : Utilitaires➔Modéliser un robot ou mécanisme.
38.Sous Type de robot, sélectionner 2 axes linéaires (T-bot).
Note : Votre repère de base (Fb) sera positionné à l’origine de votre station.
Note : Si vous devez diviser votre objet en plusieurs pièces (pour la mesure) et changer la couleur de votre robot, suivre les étapes décrites dans la section sur la modélisation d’un robot 6 axes.
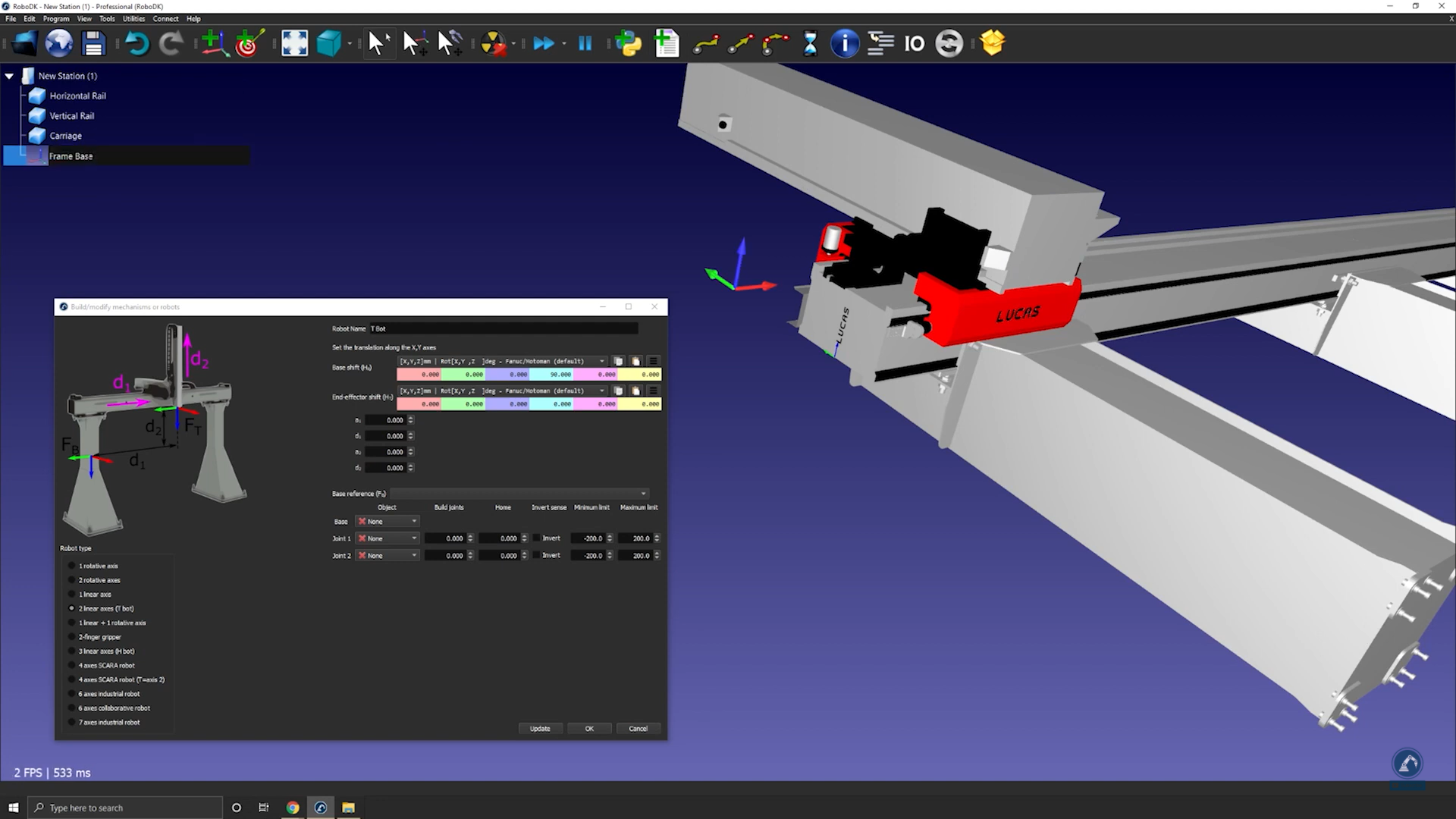
39.Une fois votre modèle divisé en 3 pièces, rouvrir l’assistant de rail : sélectionner Utilitaires➔Modéliser un robot ou mécanisme.
40.Sélectionner l’option : 2 axes linéaires (T-bot).
41.Renommer votre robot en T-bot (dans Robot Name).
Suivre les étapes suivantes afin de trouver l’emplacement de votre repère de base :
42.Si vous considérez que votre repère de base doit se trouver à la position 0 du rail, créer votre repère exactement à cet endroit et le renommer Frame Base.
Suivre les étapes suivantes afin de modifier la position du repère :
43.Ouvrir le panneau du repère en double-cliquant dessus.
44.Mesurer la position du centre de la surface en ouvrant votre outil de mesure : Outils➔Mesure.
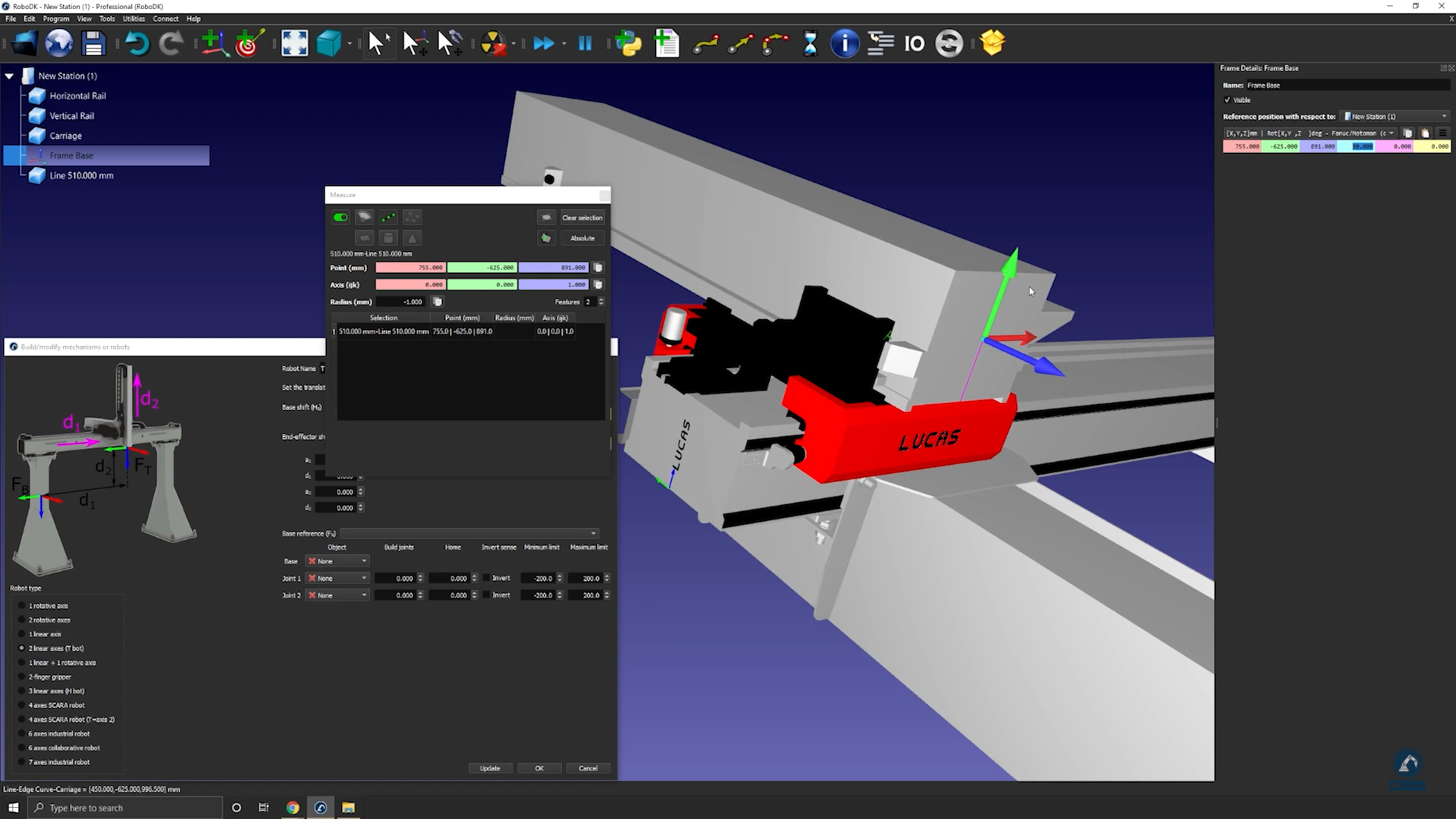
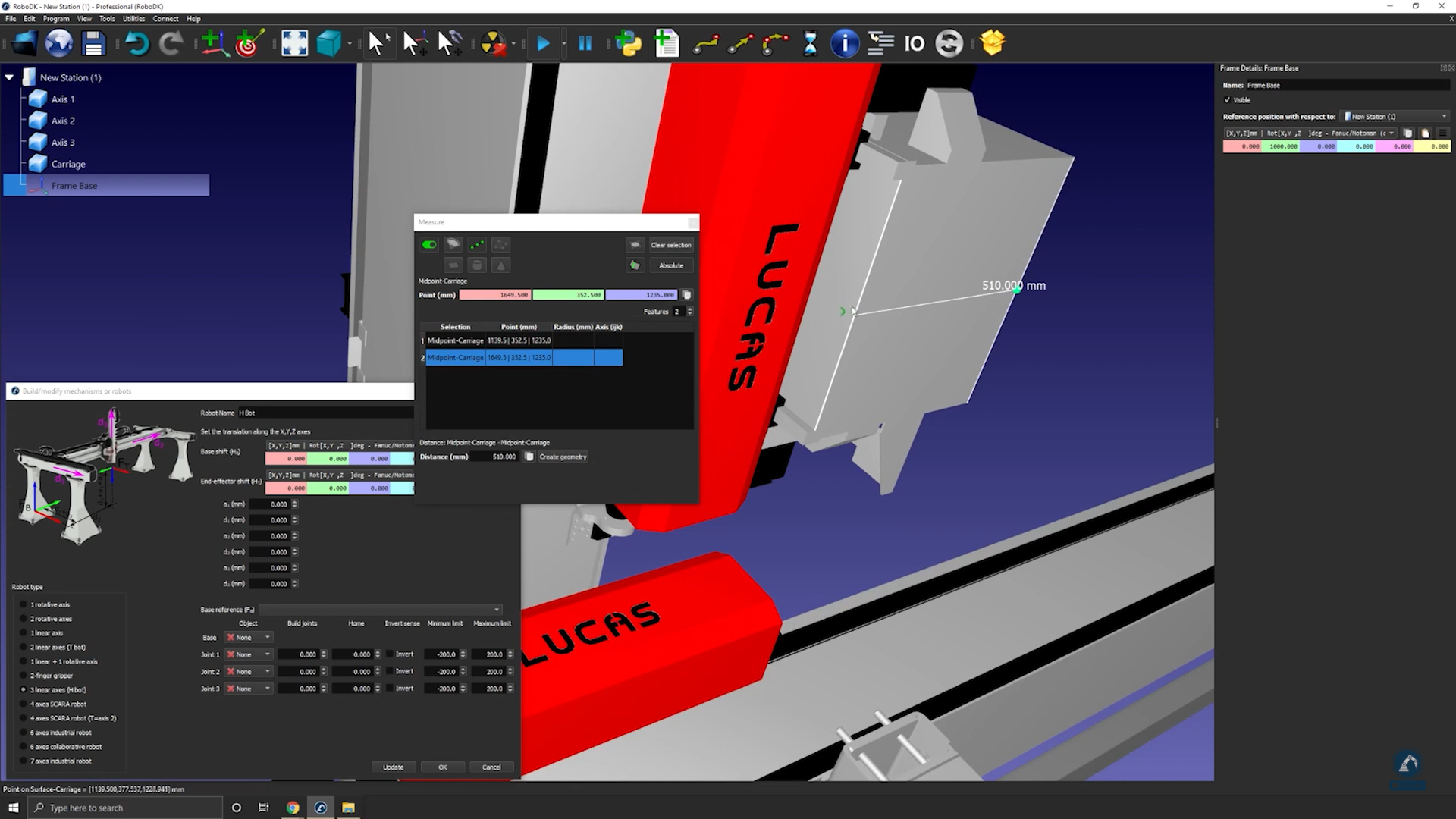
45.Sélectionner le point central de chaque arête (comme indiqué ci-dessous) afin de trouver la distance entre les deux lignes.
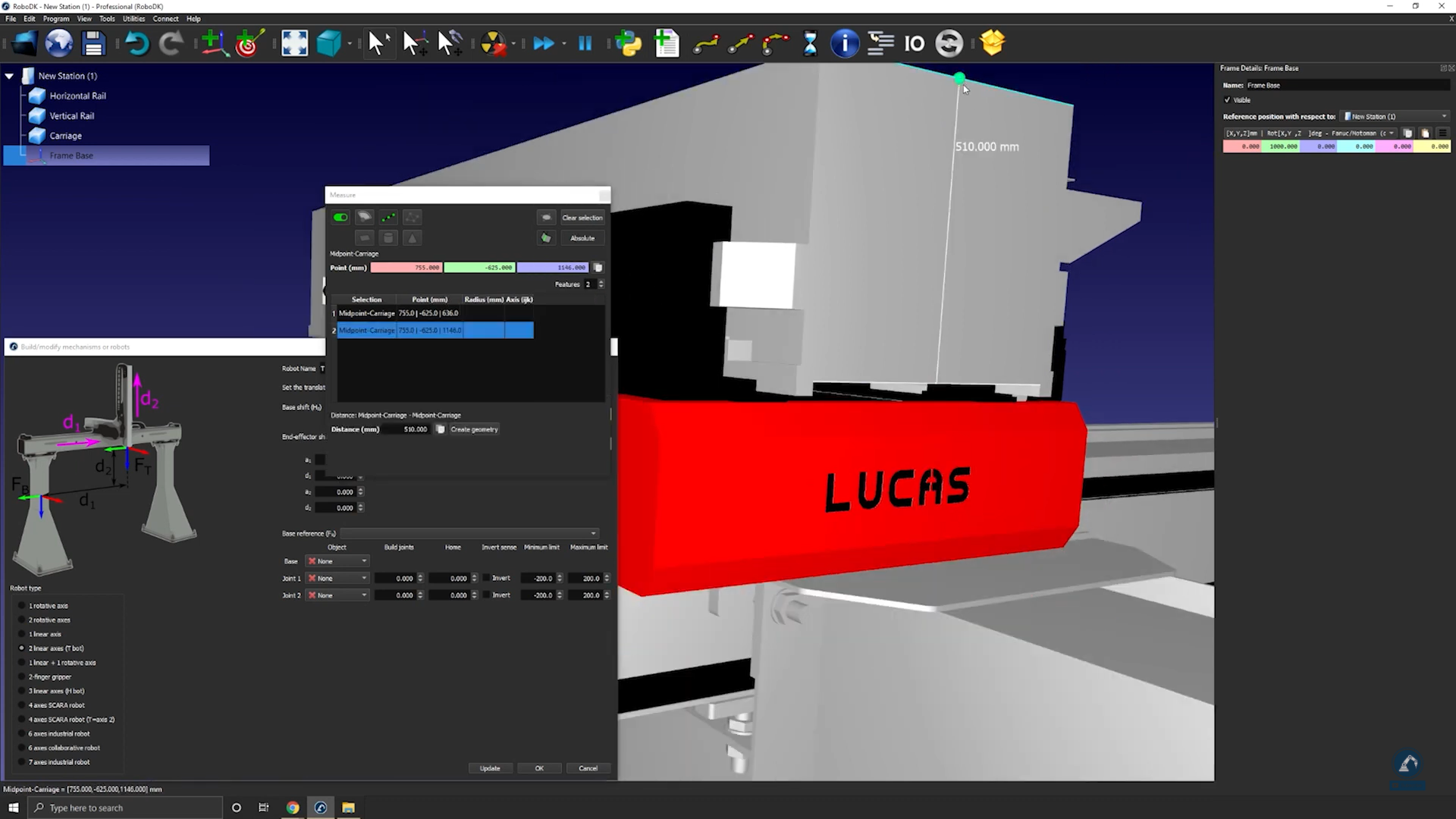
46.Sélectionner Créer une géométrie dans la fenêtre Mesure, ce qui créera une ligne entre les deux points.
47.Sélectionner Effacer la sélection.
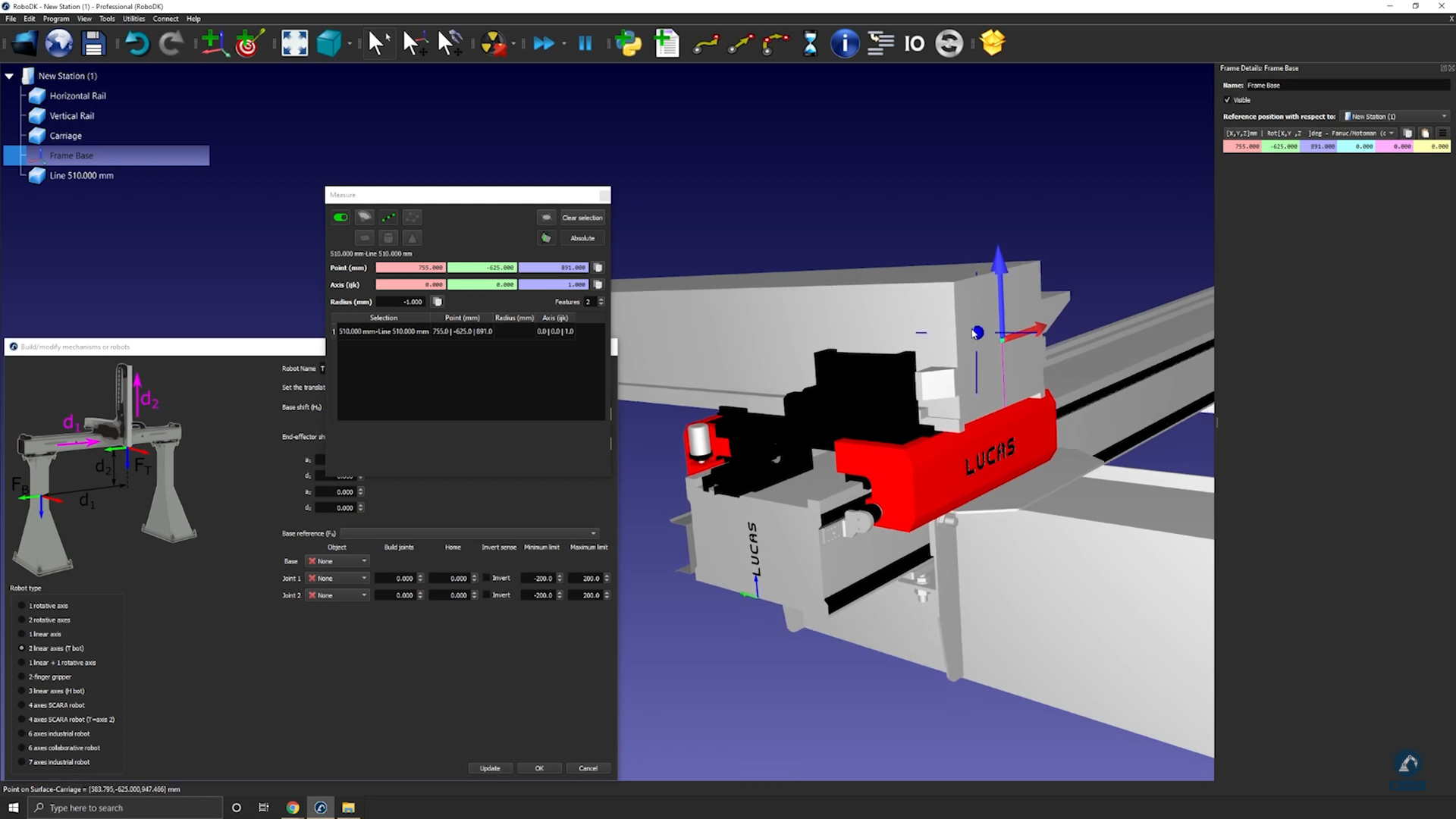
Suivre les étapes suivantes afin de mesurer la position du point central entre les deux lignes :
48.Sélectionner le point central de la ligne.
49.Copier les valeurs de la fenêtre Mesure et les coller en tant que position du repère (comme indiqué ci-dessous).
Suivre les étapes suivantes afin de vérifier que les orientations sont identiques :
50.Effectuer une rotation de 90 degrés dans le sens antihoraire autour de X, puis une rotation de 90 degrés autour de l’axe Z (comme indiqué ci-dessous).
51.Saisir les mesures du rail dans la fenêtre « Modéliser un robot ou mécanisme » comme indiqué ci-dessous.
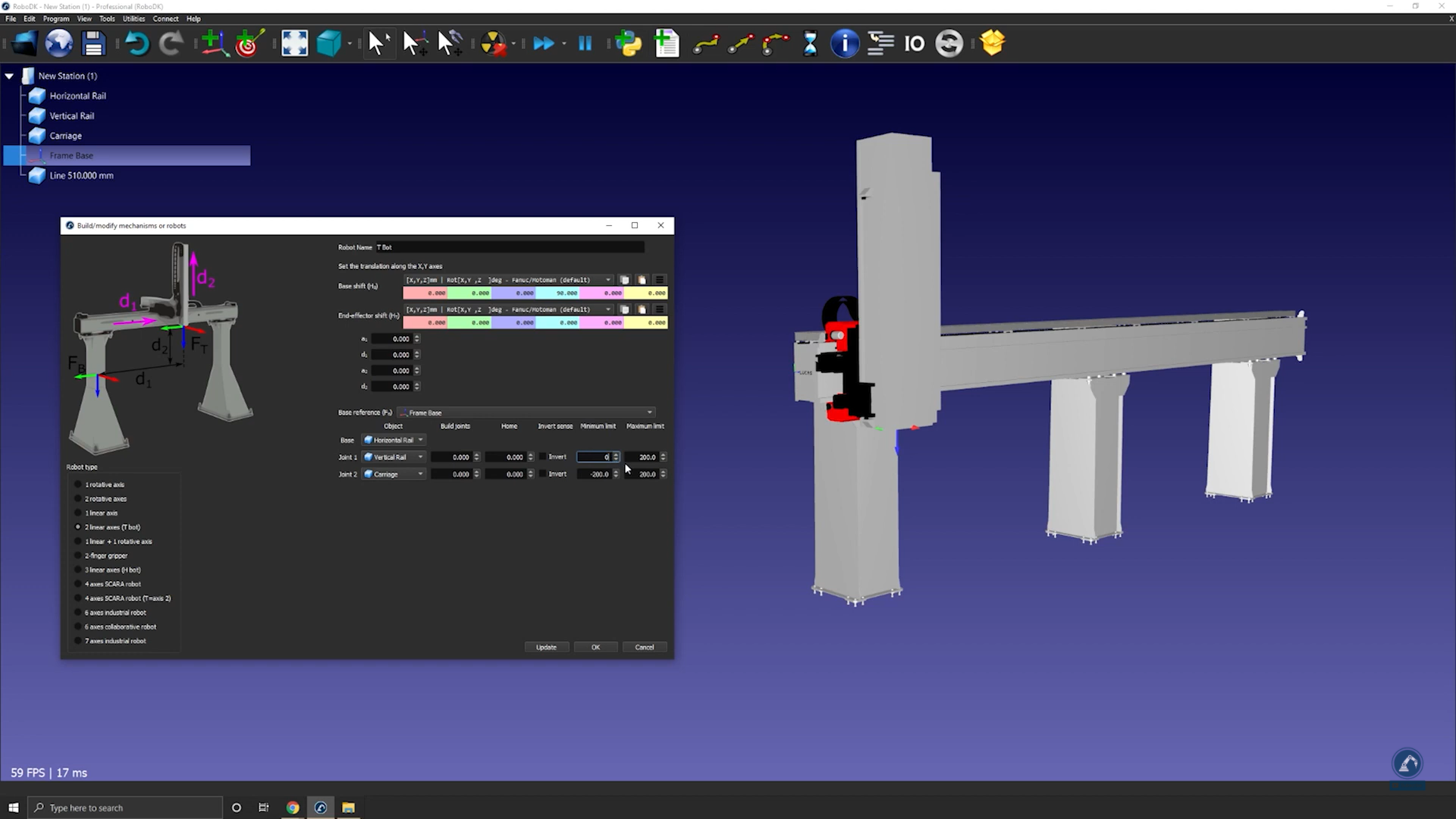
52.Sélectionner Mettre à jour afin de créer le robot.
Note : Vous pouvez double-cliquer sur le mécanisme et utiliser le Joint Axis Jog afin de vérifier que les axes se déplacent dans la bonne direction et que les limites des Joints sont correctement définies.
53.Si vous êtes satisfait du résultat, sélectionner Ok dans la fenêtre « Modéliser un robot ou mécanisme ».
Comment modéliser un robot 3 axes cartésien
La vidéo suivante montre comment modéliser un robot cartésien à 3 axes (H-bot). Les bras robotiques peuvent être montés sur des axes externes pour étendre leur portée.
Suivez ces étapes pour configurer votre modèle 3D dans RoboDK :
54.Faites glisser et déposez le modèle 3D (tel qu'un fichier STEP ou IGES) dans RoboDK pour le charger dans votre station.
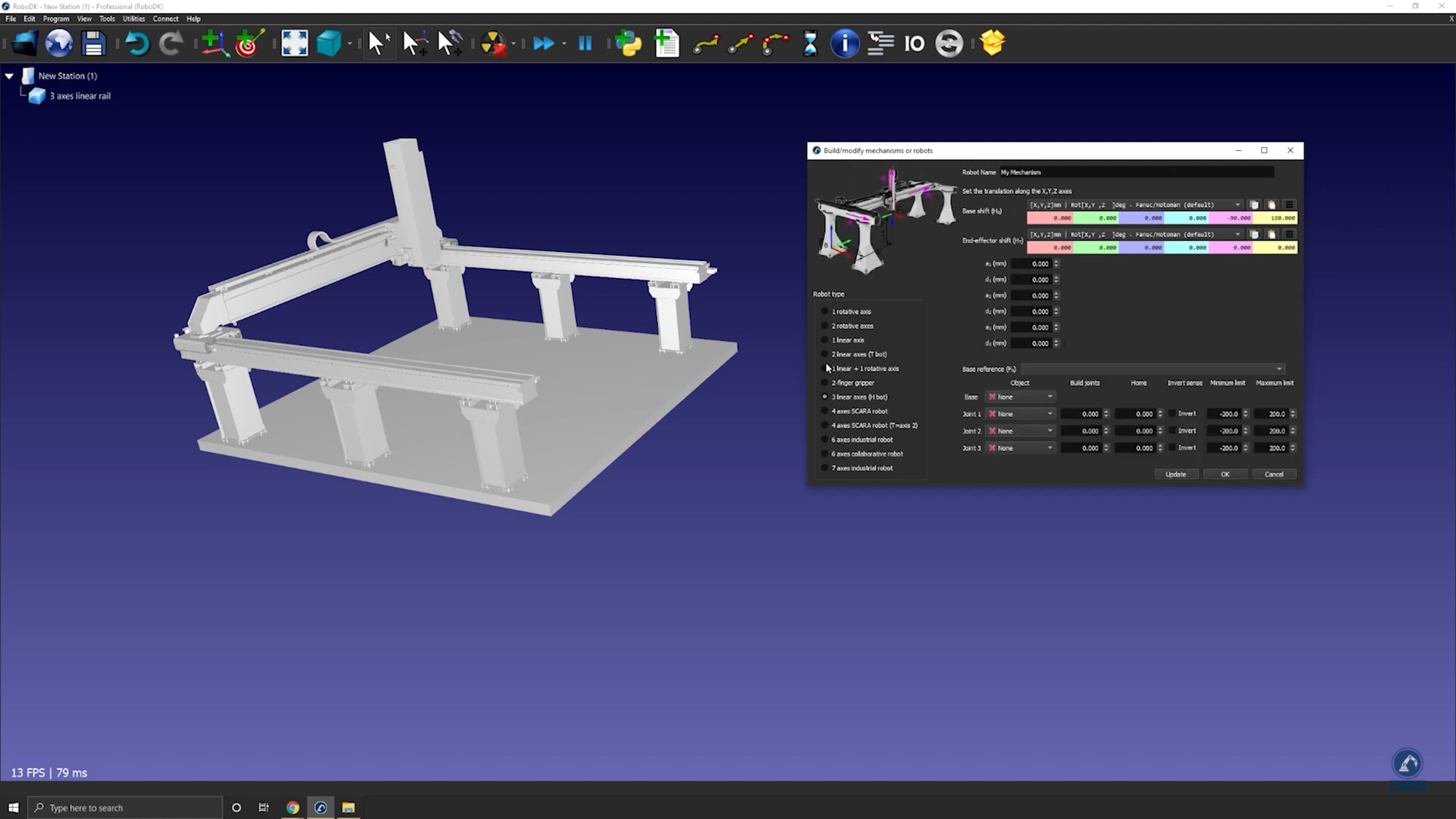
55.Ouvrez l'assistant de mécanisme : sélectionnez Utilitaires→Modéliser un robot ou mécanisme.
56.Sous Type de robot, sélectionnez 3 axes linéaires (H-bot).
Suivez ces étapes pour créer votre repère de base :
57.Une fois votre objet divisé en différentes pièces, rouvrez l'assistant de rail (sélectionnez Utilitaires→Modéliser un robot ou mécanisme→3 axes linéaires).
58.Renommez votre robot sous Nom du robot.
59.Créez un repère à la position 0 du rail. Vous pouvez le renommer Frame Base.
Suivez ces étapes pour modifier la position du repère :
60.Ouvrez le panneau du repère en double-cliquant sur « Frame Base ».
61.Ouvrez l'outil de mesure : Outils→Mesure.
62.Sélectionnez l'icône mise en surbrillance ci-dessous dans l'outil de mesure, puis sélectionnez les deux arêtes de votre objet pour trouver la distance entre les deux points centraux.
63.Sélectionnez Créer une géométrie pour créer une ligne entre les deux points centraux.
64.Maintenant que la ligne entre les deux points est créée, vous pouvez sélectionner Effacer la sélection.
65.Sélectionnez le centre de la ligne pour trouver la mesure du point central de la ligne que vous venez de créer.
66.Copiez les valeurs et collez-les comme position du repère (comme indiqué dans l'image ci-dessous) pour vous assurer que la position du repère correspond à l'image de référence.
Suivez ces étapes pour vous assurer que les orientations sont identiques :
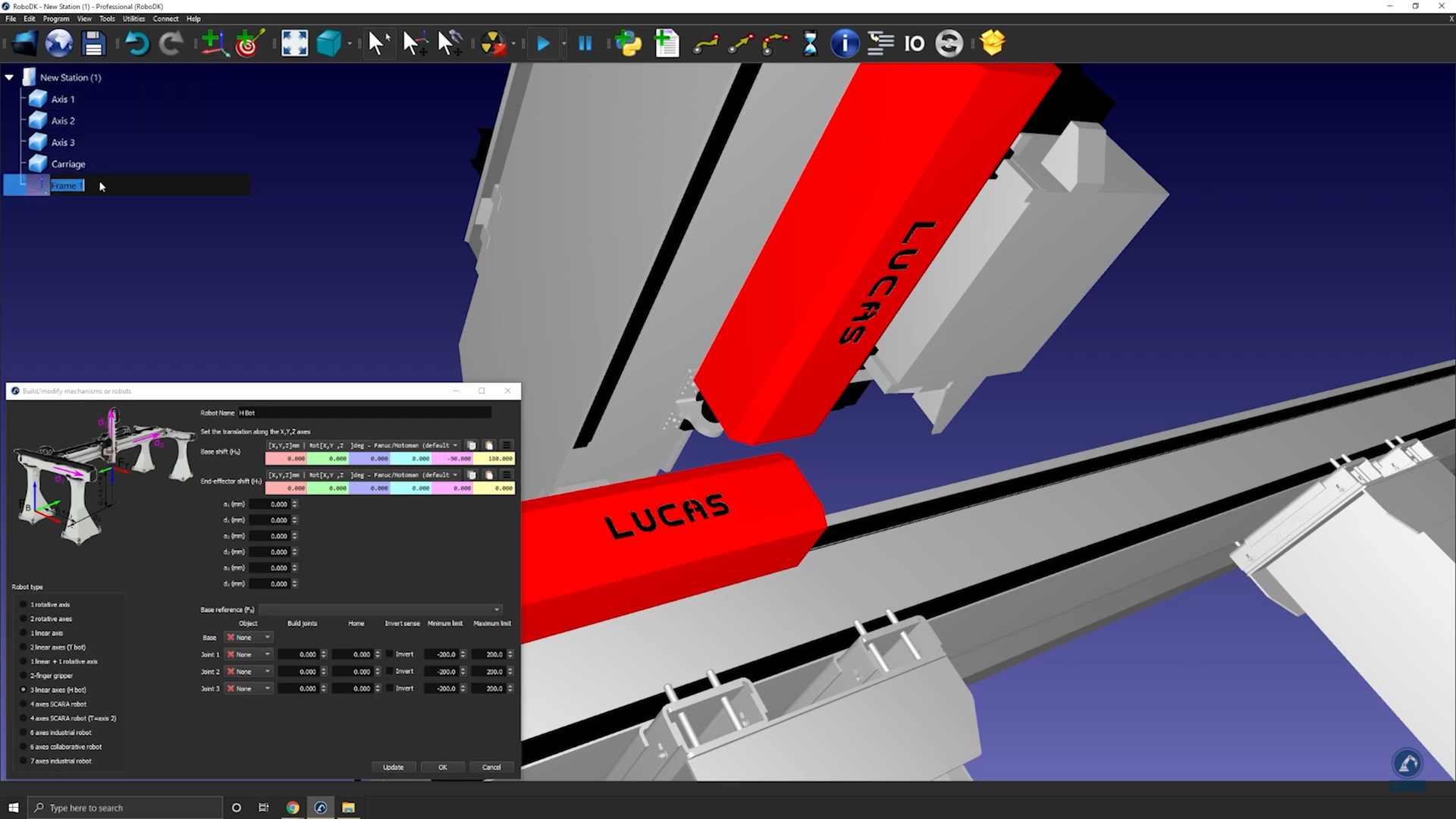
67.Faites une rotation de 90 degrés dans le sens antihoraire.
68.Sélectionnez Frame Base, puis sélectionnez les modèles 3D du rail (sélectionnez chaque section une par une) comme indiqué dans l'image ci-dessous.
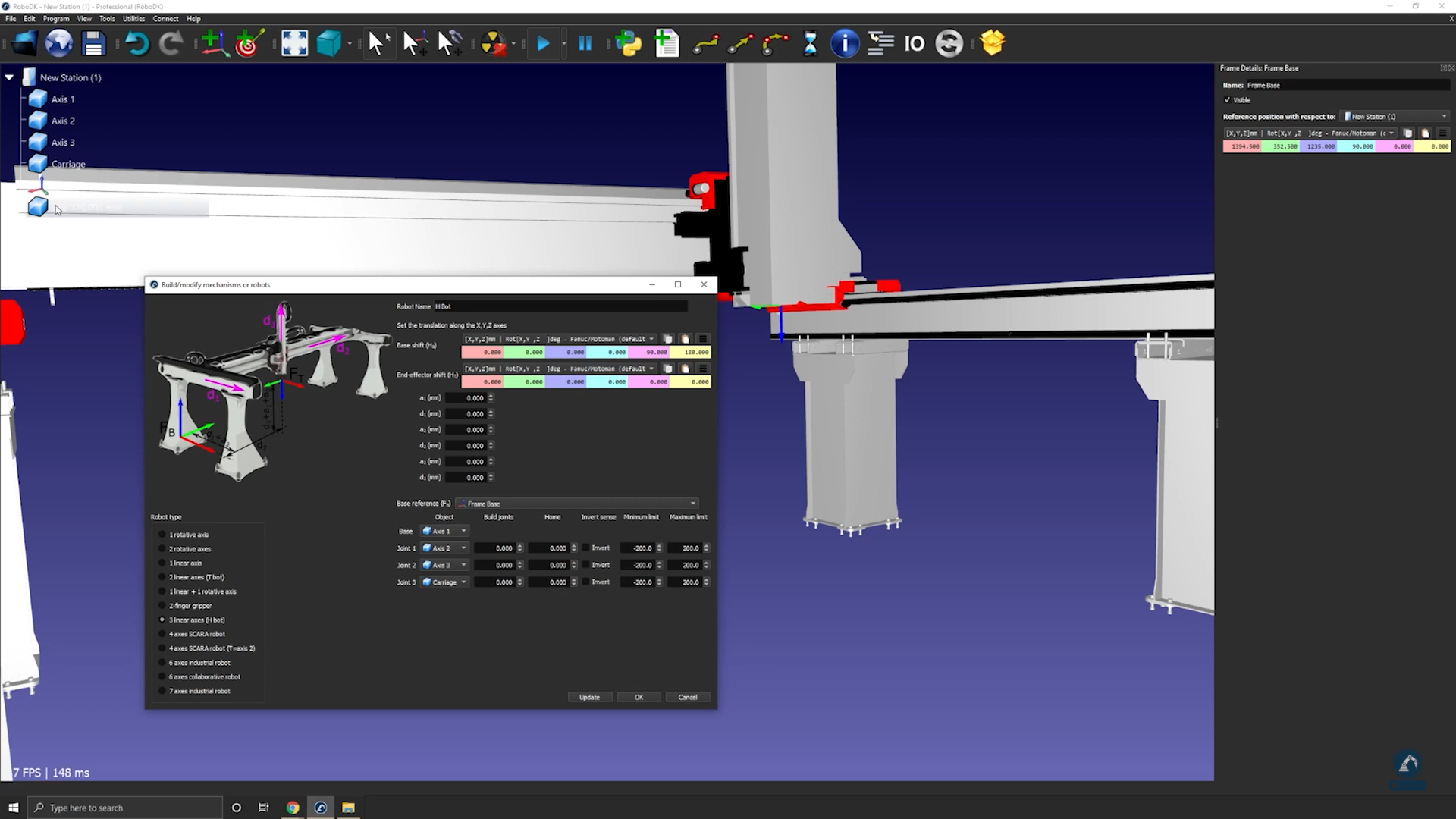
69.Saisissez la longueur de chaque rail dans la section de mesure.
70.Déplacez chaque axe sous Joint Axis Jog pour vous assurer que chaque axe se déplace correctement.
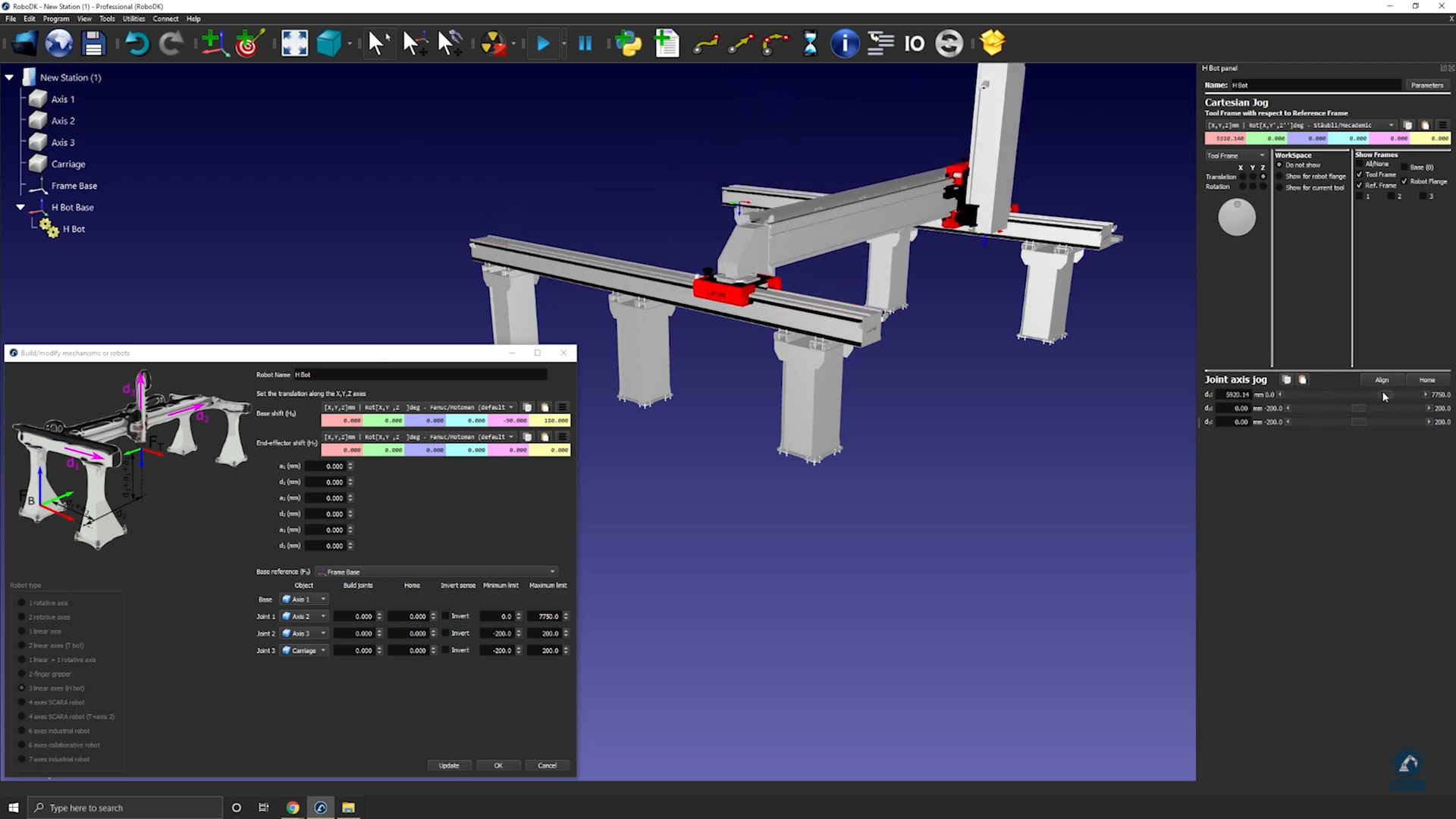
71.Appuyez sur Mettre à jour après avoir testé chaque axe pour créer votre robot.
72.Si le résultat vous convient, vous pouvez appuyer sur Ok dans la fenêtre du modèle de mécanisme.
Comment modéliser un préhenseur parallèle à 2 doigts
Vous pouvez modéliser un préhenseur parallèle dans RoboDK en utilisant l’outil Modéliser un robot ou mécanisme. Les préhenseurs parallèles sont aussi appelés préhenseurs à 2 doigts et permettent à un robot de saisir des pièces.
Vidéo : Comment construire un préhenseur à 2 doigts : https://www.youtube.com/watch?v=kK4PRTjOZ48.
Suivre les étapes suivantes afin de configurer votre modèle 3D dans RoboDK :
73.Importer votre modèle 3D : faire glisser et déposer votre fichier STEP afin de le charger dans votre station (les fichiers IGES ou STL fonctionnent également).
74.Ouvrir l’assistant de mécanisme : Utilitaires➔Modéliser un robot ou mécanisme.
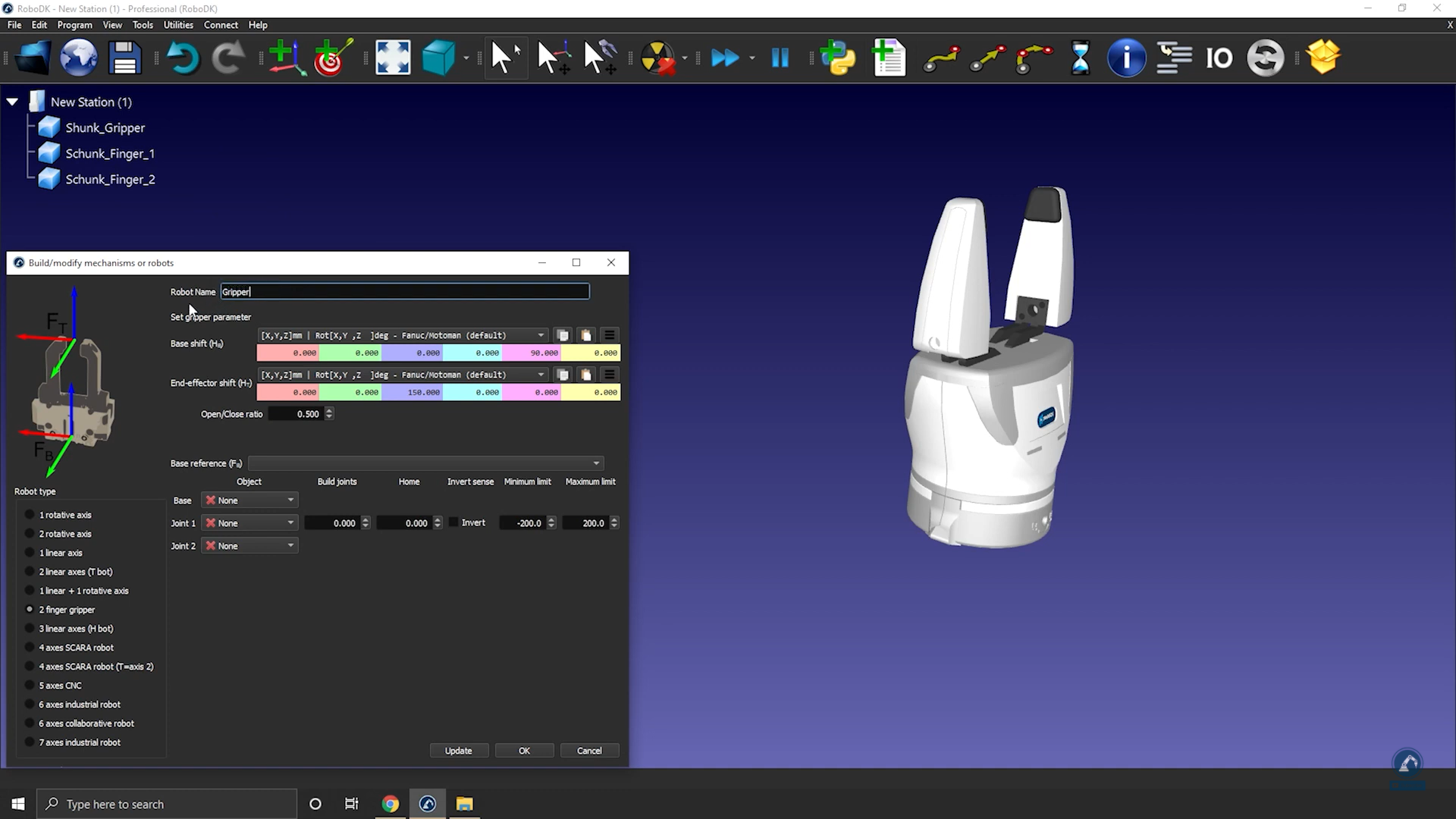
75.Sélectionner Préhenseur à 2 doigts sous « Type de robot ».
76.Vous pouvez renommer votre robot « Gripper ».
Suivre les étapes suivantes afin de positionner votre repère de base :
77.Créer un repère (il doit se trouver sous le préhenseur) et le renommer Frame Base.
78.S’assurer que le repère que vous venez de créer est positionné conformément à l’image : ramener le repère à 0,000 mm (X, Y, Z).
Note : Vous pouvez simplifier les choses en positionnant les doigts de votre préhenseur à leur position d’origine (0 mm). Si vous souhaitez que la position zéro corresponde au préhenseur fermé, déplacer les doigts vers le milieu jusqu’à ce qu’ils se touchent.
79.Saisir la plage de mouvement du préhenseur : si vous placez les doigts à la position 0, la limite minimale sera 0 et la limite maximale sera 80.
80.Sélectionner Mettre à jour.
81.S’assurer qu’il se déplace dans la bonne direction et que les limites sont correctes en utilisant le Joint Axis Jog.
82.Si vous êtes satisfait du résultat, sélectionner Ok.
Comment modéliser un robot 6 axes
Cet exemple montre comment modéliser un bras robotique industriel à 6 axes à partir de zéro, en utilisant les modèles 3D fournis par le fabricant.
Suivez ces étapes pour rassembler des informations sur votre robot :
83.Vous aurez d'abord besoin des modèles 3D (tels que des fichiers STEP ou IGES).
84.Vous aurez également besoin de la fiche technique ou du manuel du robot.
Suivez ces étapes dans RoboDK pour ouvrir la fenêtre de modélisation du robot :
85.Sélectionnez Utilitaires→Modéliser un robot ou mécanisme.
86.Sous Type de robot, sélectionnez Robot industriel à 6 axes.
Chargez les fichiers 3D de votre robot dans RoboDK en procédant comme suit :
87.Faites glisser et déposez votre robot dans RoboDK, ou sélectionnez Fichier puis Ouvrir (le chargement peut prendre quelques secondes).
Suivez ces étapes pour diviser un objet en différentes pièces afin de pouvoir traiter chaque pièce séparément :
88.Si le fichier CAO que vous avez téléchargé est un seul objet, vous pouvez le dégrouper (fichier STEP) en faisant un clic droit sur n'importe quel objet et en sélectionnant Diviser l'objet.
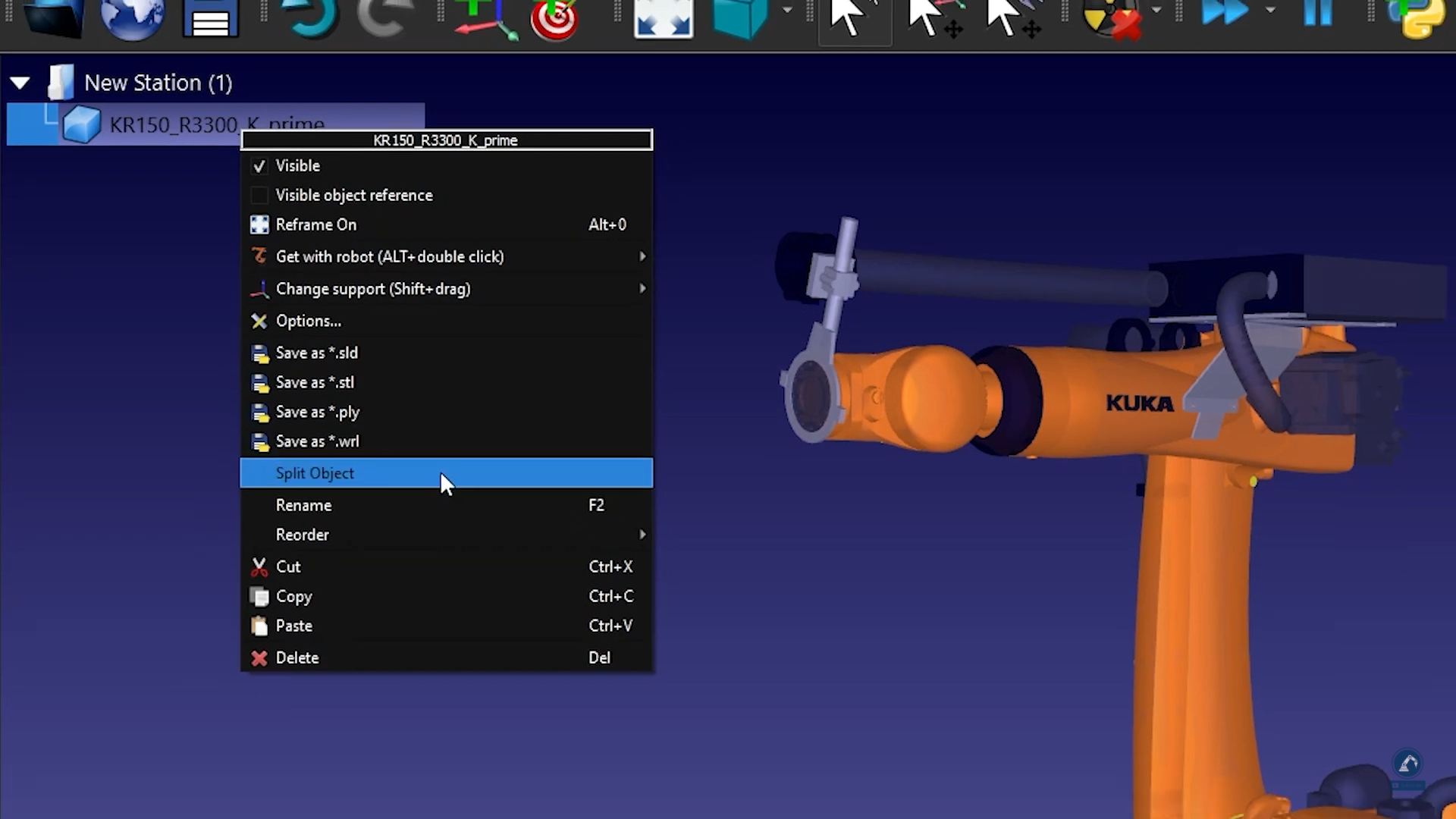
89.Vous pouvez ensuite le regrouper pour créer les différentes pièces du robot.
Suivez ces étapes pour saisir les informations de cinématique du robot dans RoboDK :
90.Donnez un nom à votre robot en le saisissant dans Nom du robot.
91.Si les pièces de votre robot sont dans le bon ordre, tous les modèles 3D devraient être renseignés correctement. Sinon, vous pouvez lier manuellement chaque objet à l'articulation du robot correspondante.
92.Renseignez les dimensions du robot en ouvrant la fiche technique.
93.Sur le croquis 3D de la fiche technique, vous trouverez toutes les valeurs recherchées. Saisissez les valeurs correctes dans RoboDK.
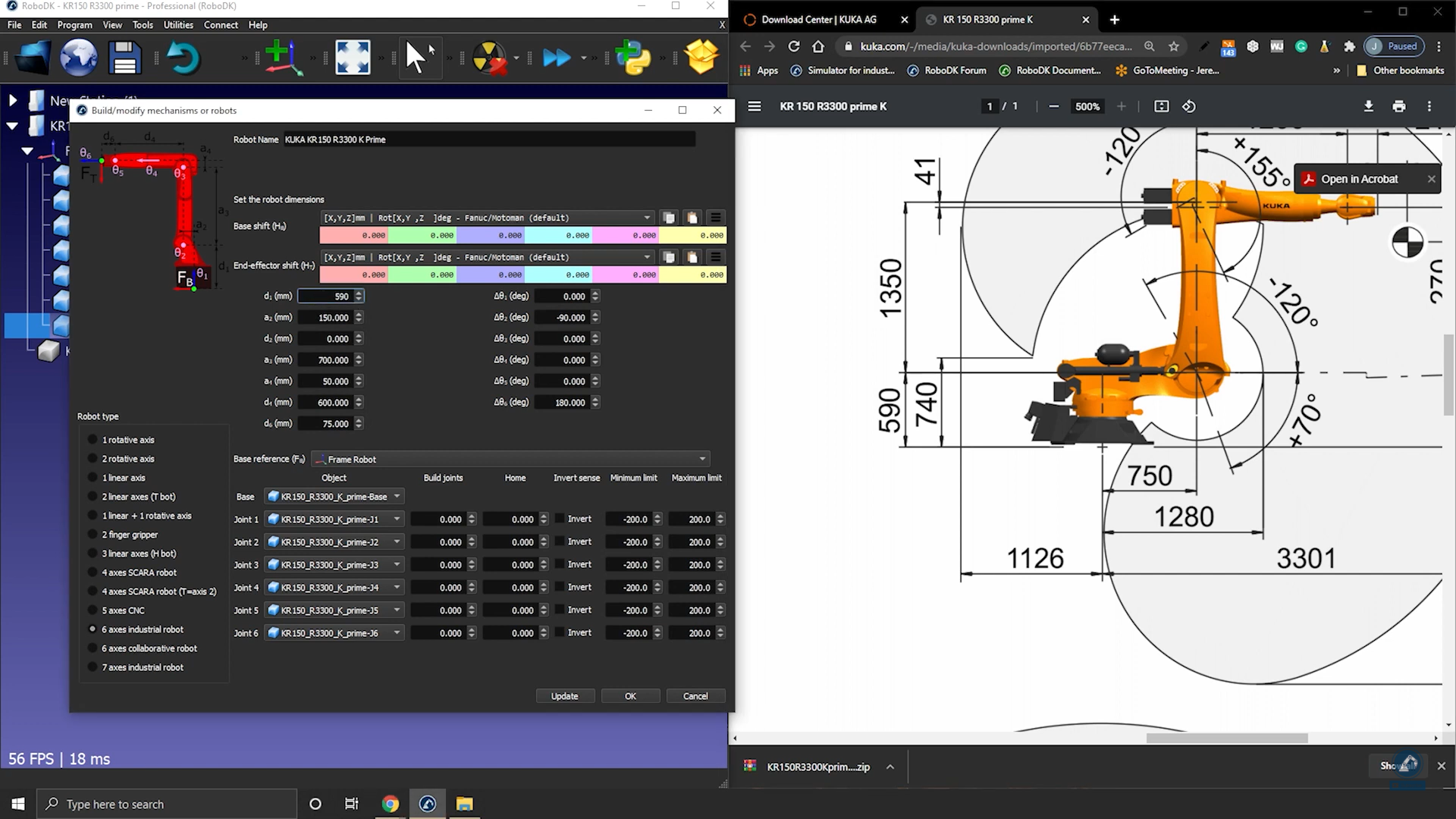
94.Une fois satisfait du résultat de la cinématique du robot, sélectionnez Mettre à jour.
Comment coupler les Joints du robot entre eux
Certains robots ont deux Joints couplés entre eux, ce qui signifie que deux des Joints du robot sont dépendants l’un de l’autre. Par exemple, les robots Fanuc ont les Joints 2 et 3 liés entre eux.
Suivre les étapes suivantes afin de coupler les Joints de votre robot dans RoboDK :
95.Tout d’abord, double-cliquer sur le robot afin d’ouvrir le panneau du robot.
96.Cliquer sur Paramètres afin d’ouvrir l’onglet Paramètres du robot.
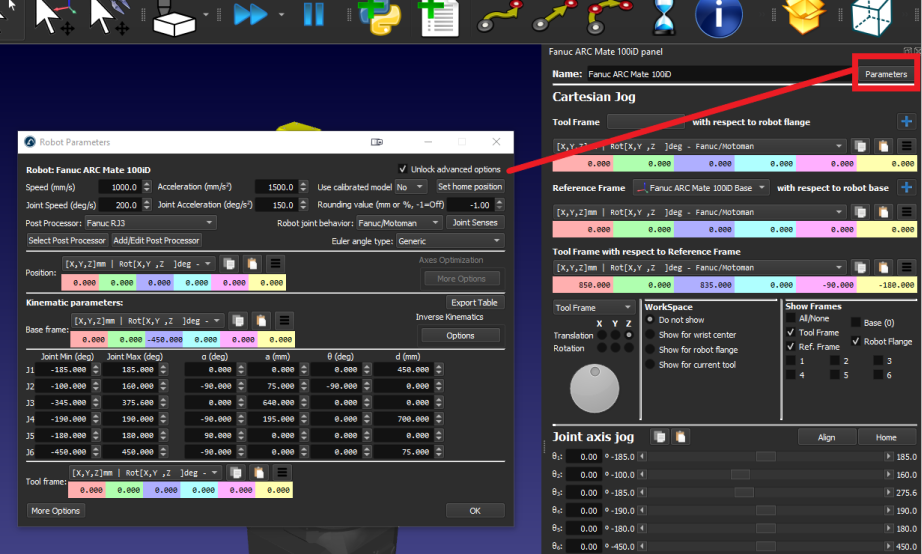
97.Cocher la case Déverrouiller les options avancées.
98.Cliquer sur Sens des Joints afin d’ouvrir l’onglet du sens des axes de Joints. Les 6 premières valeurs représentent le sens de rotation des Joints et la dernière valeur est le couplage des Joints 2 et 3. Changer la 7e valeur à -1 afin de lier les Joints. Un nouvel onglet contenant le polygone de limite du Joint couplé s’ouvrira ; vous pouvez modifier les limites afin d’éviter que le robot n’entre en collision avec lui-même.
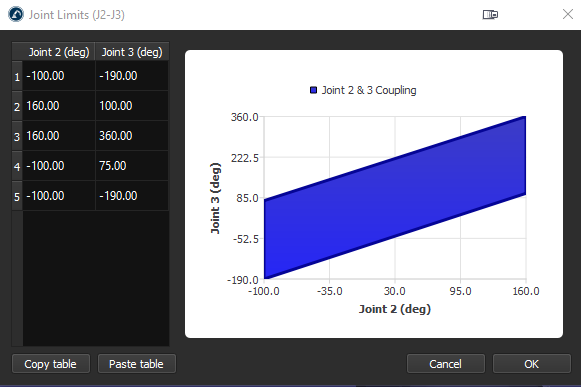
Note : Coupler les Joints fera bouger les Joints 2 et 3 ensemble, et changer la valeur à 1 au lieu de -1 inversera le sens du couplage des Joints.