Définir un repère de Référence
Un repère de référence définit la position d’un objet par rapport au robot (position et orientation). La plupart des applications de programmation Hors-ligne demande de définir un repère afin de localiser un objet par rapport au robot.
Plus d’information à propos des repères de référence dans la section Premiers pas avec RoboDK.
Définir un repère de référence demande de sonder des points en utilisant un outil robot (les valeurs des joints doivent être récupérées à des localisation précises).
Suivre ces étapes afin d’identifier un repère de référence par rapport au robot :
1.Sélectionner Utilitaires➔
2.Sélectionner le repère à définir/calibrer.
Possibilité de faire un clic droit sur le repère et de choisir 
3.Sélectionner la méthode :
a.3 points (avec le 3ème point croisant l’axe Y+)
b.3 points (avec le 1er point étant l’origine du repère)
c.6 points
d.Etalonnage positionneur (1 axe), calibre un repère sur une table tournante, donne un axe correctement aligné.
e.Etalonnage positionneur (2 axes), calibre un repère sur une table tournante à 2 axes.
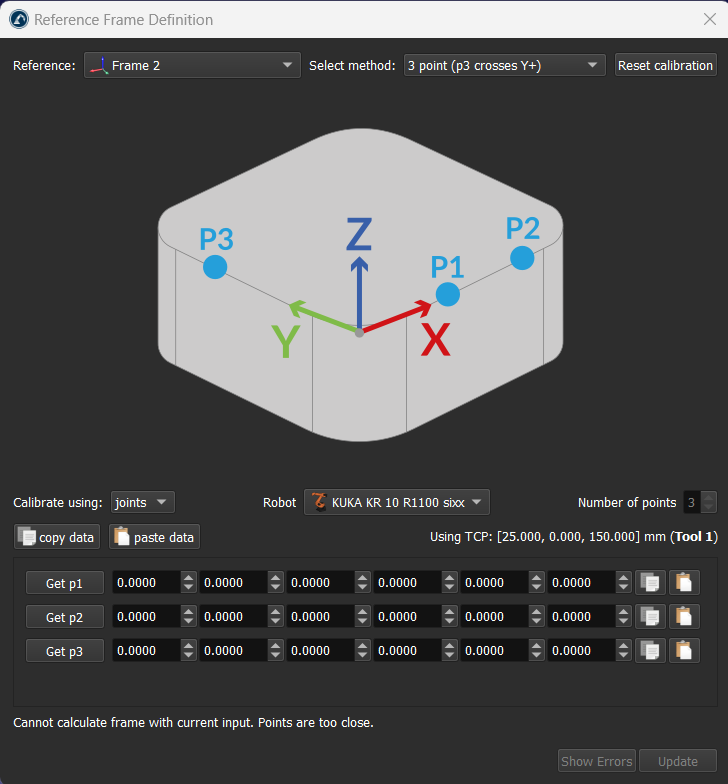
4.Les valeurs par Joints sont utilisées par défaut. Changer-les en Points si vous avez la position XYZ de chaque point par rapport à la base du robot.
5.Sélectionner le robot si plus d’un robot est disponible.
6.Démarrer le remplissage du tableau en mesurant des points.
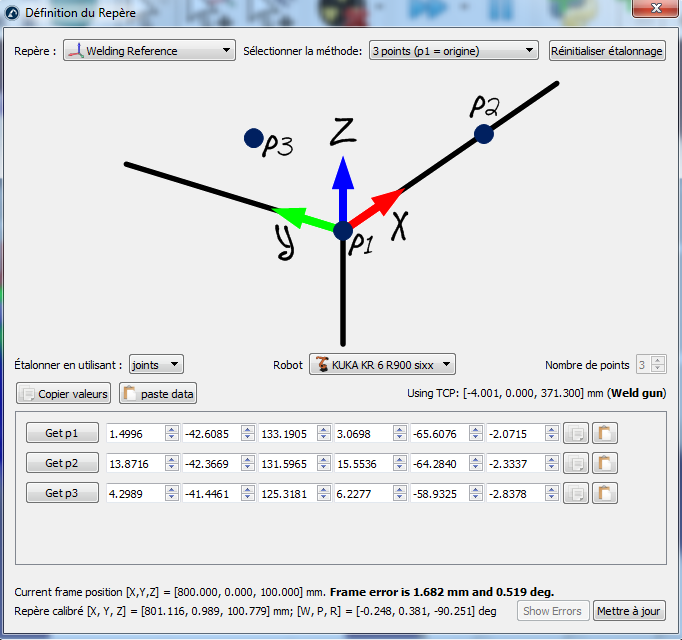
7.Pour terminer, cliquer sur Mettre à jour afin d’appliquer la nouvelle position du repère de référence sélectionné dans la station RoboDK.
Aligner un objet avec une référence
Cette section explique comment le repère (système de coordonnées) d’un objet peut être aligné avec sa propre géométrie. Cette section permet le mouvement du repère d’un objet vers une localisation qui peut être identifiée en réglage réel.
Suivre ces étapes pour aligner virtuellement le repère d’un objet par rapport aux points spécifiques liés à la géométrie de l’objet.
1.Charger l’objet 
2.Sélectionner la station active 
3.Sélectionner Programme➔
Vérifier que le repère est directement rattaché à la racine de la station (Et non à un autre repère).
4.Faire un clic droit sur le repère et choisir
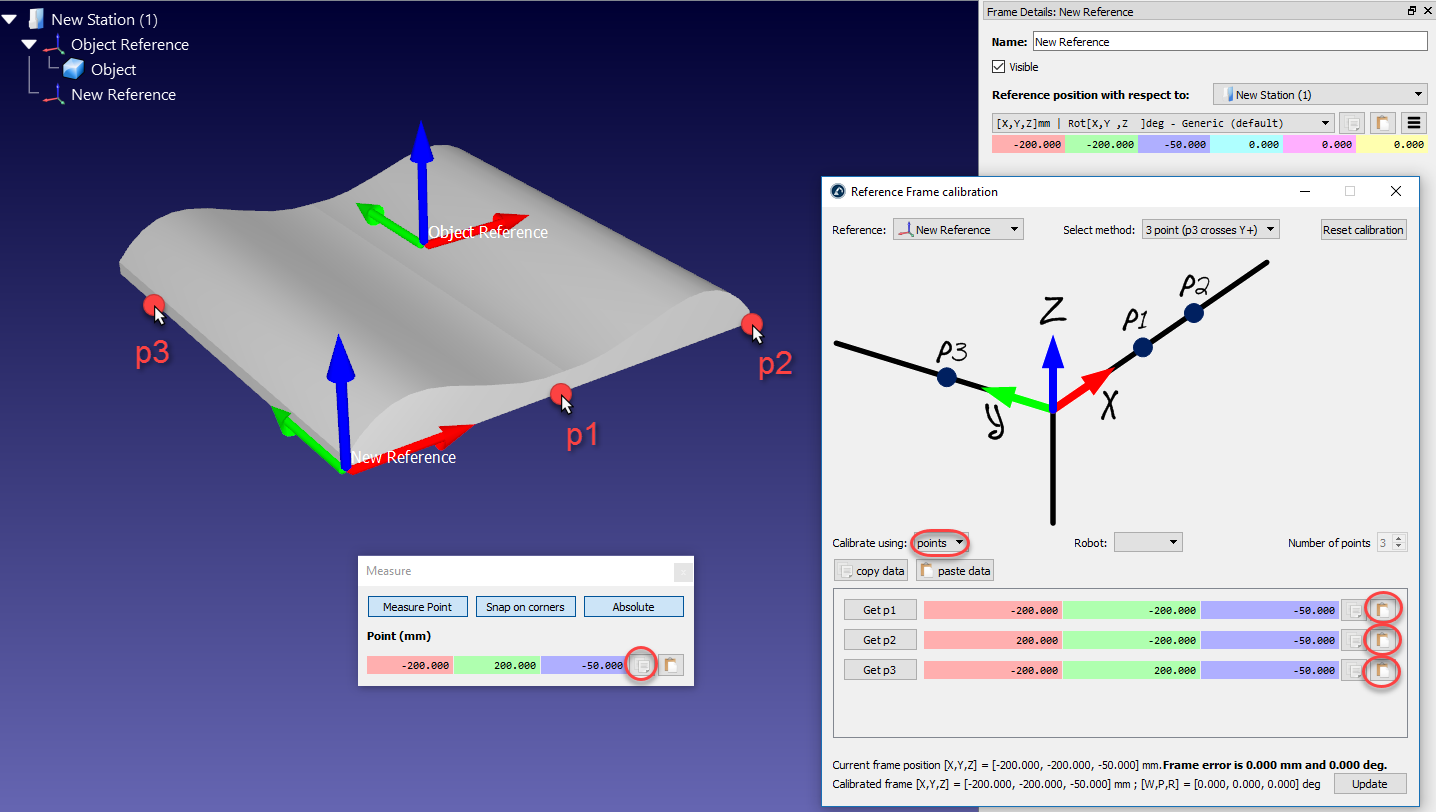
La procédure est similaire à la section précédente. La différence principale est que vous devez sélectionner les points de l’objet virtuel au lieu de l’objet réel.
5.Sélectionner la méthode de calibration.
Par exemple : La méthode des 3 points (avec le 3ème point traversant l’axe Y+)
6.Sélectionner Etalonner en utilisant Points
7.Sélectionner Outils➔Mesure pour ouvrir l’outil de Mesure
8.Sélectionner le bouton Absolu, les points seront mesurés en rapport à la station (référence absolue)
9.Sélectionner 3 points sur l’objet virtuel (un par un) et entrer les dans la fenêtre de calibration du repère.
10.Sélectionner Mise à jour. Le repère devrait apparaitre à l’endroit désiré.
11.Cliquer droit sur l’objet et sélectionner Changement du support. Sélectionner le nouveau repère. La position absolue de l’objet ne changera pas. Cependant, la position relative de l’objet par rapport au nouveau repère sera correctement définie.
12.L’objet et sa propre référence sont prêts pour une programmation Hors-Ligne : Sélectionner et faire glisser le nouveau repère sur le repère du robot.
Aligner les références robots
Cette section explique comment deux robots ou plus peuvent être programmés hors-ligne tout en partageant un repère commun.
Dans une application typique de programmation hors-ligne, la position de l’objet est mise à jour par rapport au robot. Cependant, lorsque deux ou plusieurs robots sont utilisés pour la même application, la position de chaque robot doit être mise à jour par rapport à une référence commune (un objet de référence ou un repère commun).
Suivre ces étapes pour mettre à jour la position des robots par rapport à un repère :
1.S’assurer que les repères des robots et le repère de l’objet ne dépendent pas les uns des autres. S’il y a une dépendance, il faut attacher les repères à l’élément station.
2.Ajouter un nouveau repère attaché à chacun des repères de base du robot comme si vous alliez définir un nouveau repère individuel pour chaque robot (Real Ref. A et Real Ref. B).
Ce repère représentera l’emplacement réel de la pièce par rapport à chaque robot.
3.Calibrer chacun de ces repères (Real Ref. A et Real Ref. B) séparément, utilisant la Procédure standard de calibration. (méthode des 3 points par exemple)
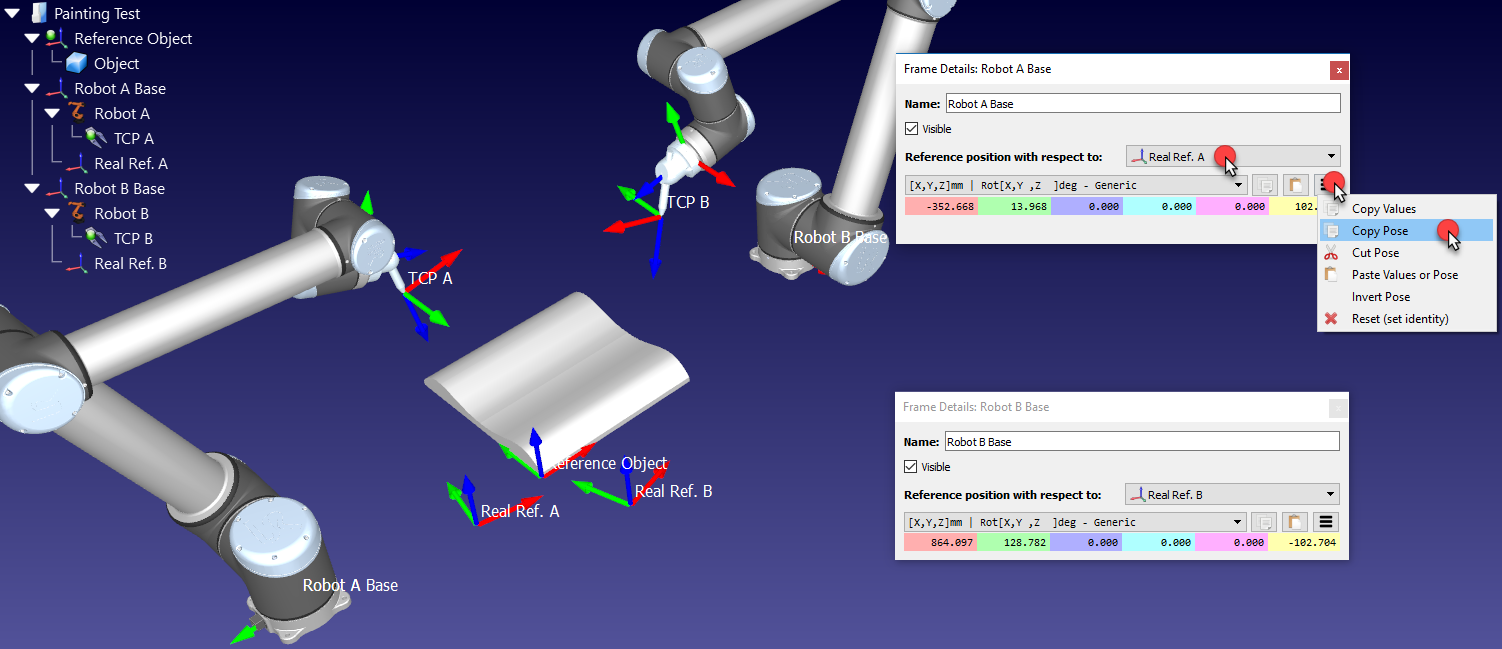
Pour le moment, vous voyez 3 repères qui devrait être coïncident mais qui ne le sont pas. Le repère de chaque robot doit être mis à jour pour régler le problème :
4.Double-cliquer sur l’un des repères robot, tel que la Robot A Base afin d’ouvrir la fenêtre de repère.
5.Copier la position du repère de la base robot en respectant le repère calibré de ce robot (Real Ref. A), en sélectionnant le bouton Copier.
6.Dans la même fenêtre, changer La position du repère par rapport à : choisir l’Objet de référence.
7.Coller la Position. Le robot va bouger et Real Ref. A sera coïncident avec Le repère de l’objet.
8.Répéter les étapes 4-7 de cette procédure pour les autres robots.
A la fin de cette procédure, tous les repères doivent correspondre et les relations entre toutes les références calibrées et les Objets de références doivent être les mêmes.