Optimisation des axes externes
Lorsque vous avez un ou plusieurs axes supplémentaires synchronisés avec votre robot, vous pouvez prioriser le déplacement de certains axes et optimiser vos projets d'usinage robotique, vos projets de suivi de courbes/points et vos projets d'impression 3D selon vos critères préférés. Plus d'informations dans la section usinage robotique.
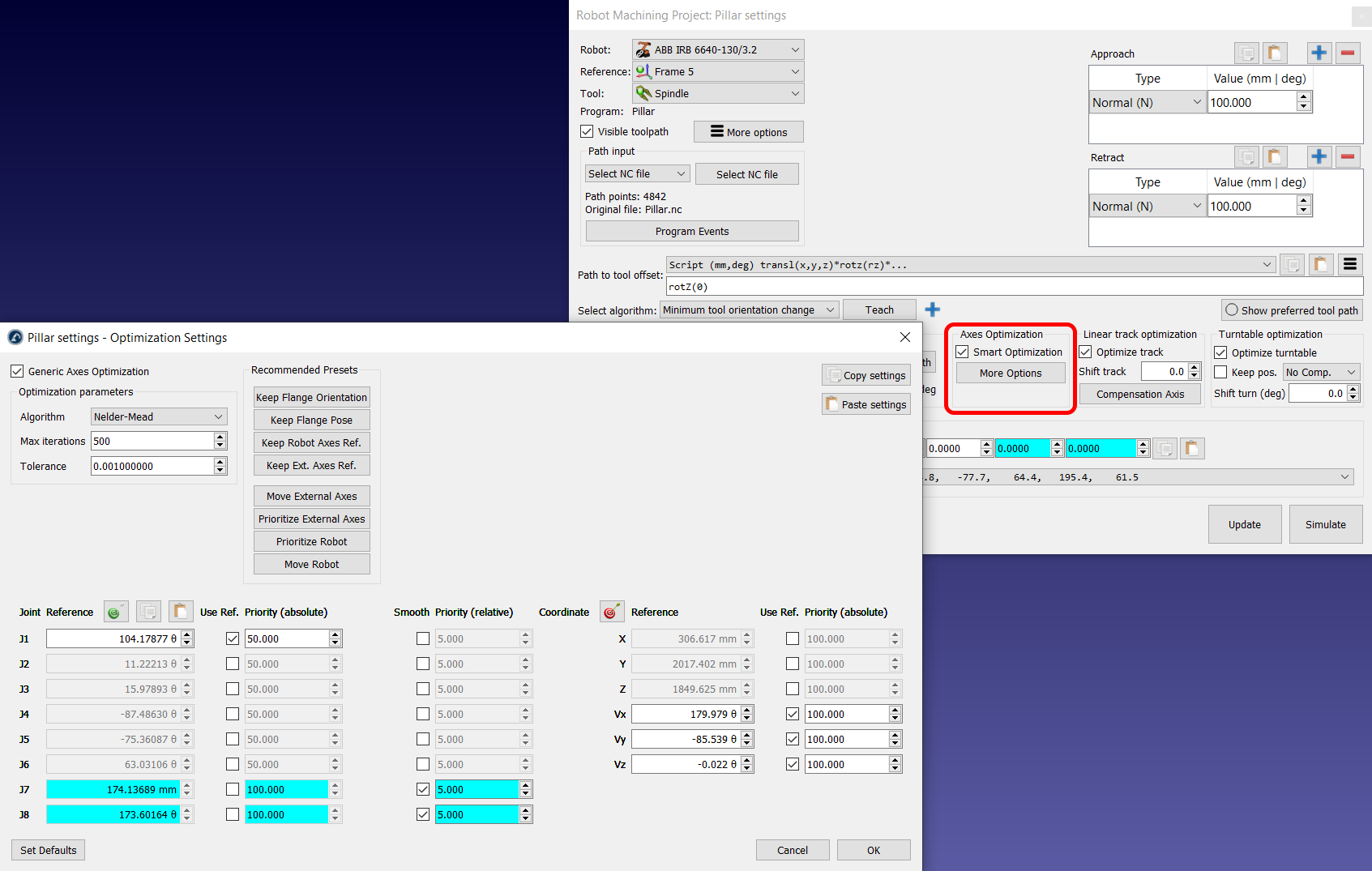
Sélectionnez Plus d'options dans la section Optimisation des axes de votre projet d'usinage robotique pour voir les options d'optimisation des axes externes.
Vous pouvez attribuer différentes priorités selon les critères suivants :
99.Maintenir les articulations de référence : vous pouvez imposer une position d'axe désirée pour certaines (ou toutes) les articulations. Un poids plus élevé signifie qu'il est plus probable de correspondre à la valeur de référence à tout moment durant le programme.
100.Minimiser le mouvement (correspondre à la position précédente) : vous pouvez imposer une « pénalité » au déplacement brusque de certains axes (mouvement relatif).
101.Maintenir la pose de référence : vous pouvez imposer une pose absolue désirée du robot à maintenir. La pose de référence est la pose de la bride du robot que vous souhaitez maintenir par rapport à la base statique du robot. La contrainte d'orientation tentera de faire correspondre les vecteurs X, Y, Z de la pose de la bride du robot selon la pose de référence.
Par exemple, si vous sélectionnez le préréglage Maintenir l'orientation de la bride, RoboDK privilégiera le maintien de l'orientation de la bride du robot pour correspondre à la pose du robot que vous aviez dans la simulation au moment où vous avez sélectionné ce préréglage (la sélection de ce préréglage met à jour la Pose de référence). De plus, si vous souhaitez que la valeur de l'articulation 1 du robot reste au voisinage de 105 deg, vous pouvez activer cette priorité.
Si vous sélectionnez le préréglage Maintenir la référence Robot, vous verrez que la référence de position est mise à jour pour correspondre à la position actuelle des axes du robot. Vous verrez également que les articulations du robot ont un certain poids (100) alors que les axes externes n'ont aucun poids (aucune préférence). D'autre part, les axes externes auront un petit poids (5) pour éviter qu'ils n'effectuent des mouvements soudains ou indésirables.
Vous pouvez modifier ces réglages pour obtenir l'effet désiré après avoir mis à jour votre projet d'usinage robotique.