Synchroniser des axes additionnels
Il est possible de synchroniser un bras robot avec des axes supplémentaire externe. Les axes externes peuvent être simplement utilisé comme des positionneurs, ou ils peuvent aussi être synchronisés avec le même contrôleur robot. Lorsque les axes externes sont synchronisés, le robot et les axes peuvent se déplacer en même temps tout en conservant des mouvements linéaires précis par rapport à la trajectoire programmée. Tous les contrôleurs robot ne supportent pas la synchronisation d’un bras robot avec des axes externes.
Il est possible de synchroniser jusqu’à 6 axes supplémentaires avec n’importe quel robot utilisant Robodk. Si vous utilisez un robot 6 axes, vous pouvez avoir un système combiné avec 12 axes.
Pour synchroniser un robot avec des axes externe :
1.Charger l’axe additionnel depuis la librairie ou modéliser le en tant que nouveau mécanisme.
2.Construire une station en plaçant le robot et les axes/mécanismes dans leurs positions.
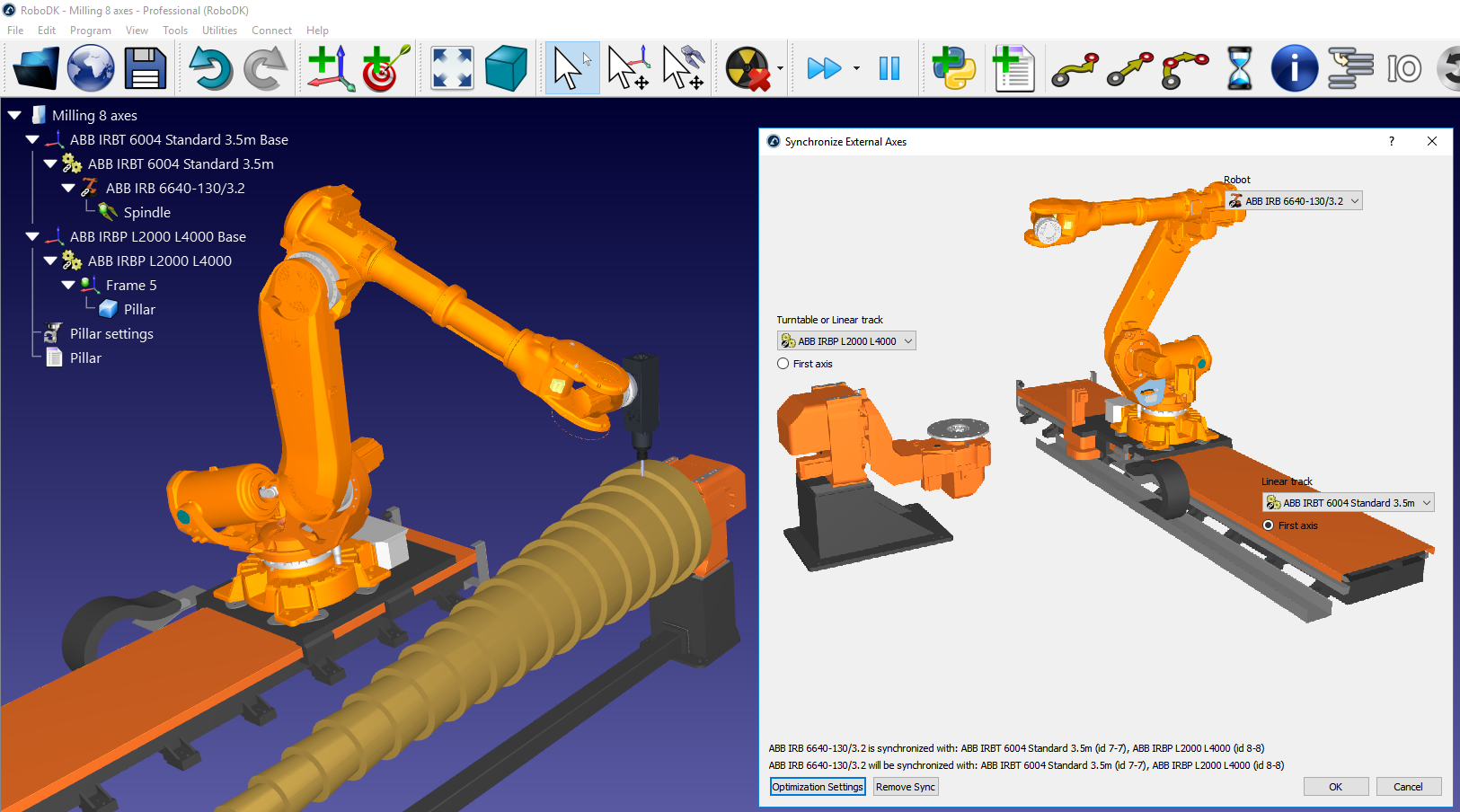
3.Sélectionner Utilitaires➔Synchronisation d’axes externe
4.Sélectionner le robot et la table tournante disponible et/ou le rail linéaire seront disponibles pour la synchronisation avec le robot.
5.Sélectionner OK. Une nouvelle fenêtre va s’ouvrir montrant les axes supplémentaires en bleu.
Les cibles liées à ce robot synchronisé afficheront des valeurs de Joints supplémentaires en bleu. Il est possible de spécifier la position préférée d’un positionneur lorsqu’un programme est généré. Les cibles cartésiennes conserveront la position cartésienne définie tout en déplaçant les axes extérieurs le long de la trajectoire.
Tous les réglages d’usinage robot afficheront des options supplémentaires pour définir la position préférée des axes externes. De plus, chaque mouvement exporté par le post-processeur inclura la position des axes externes.