Ajouter un Programme de Rétraction
De façon similaire aux opérations précédentes :
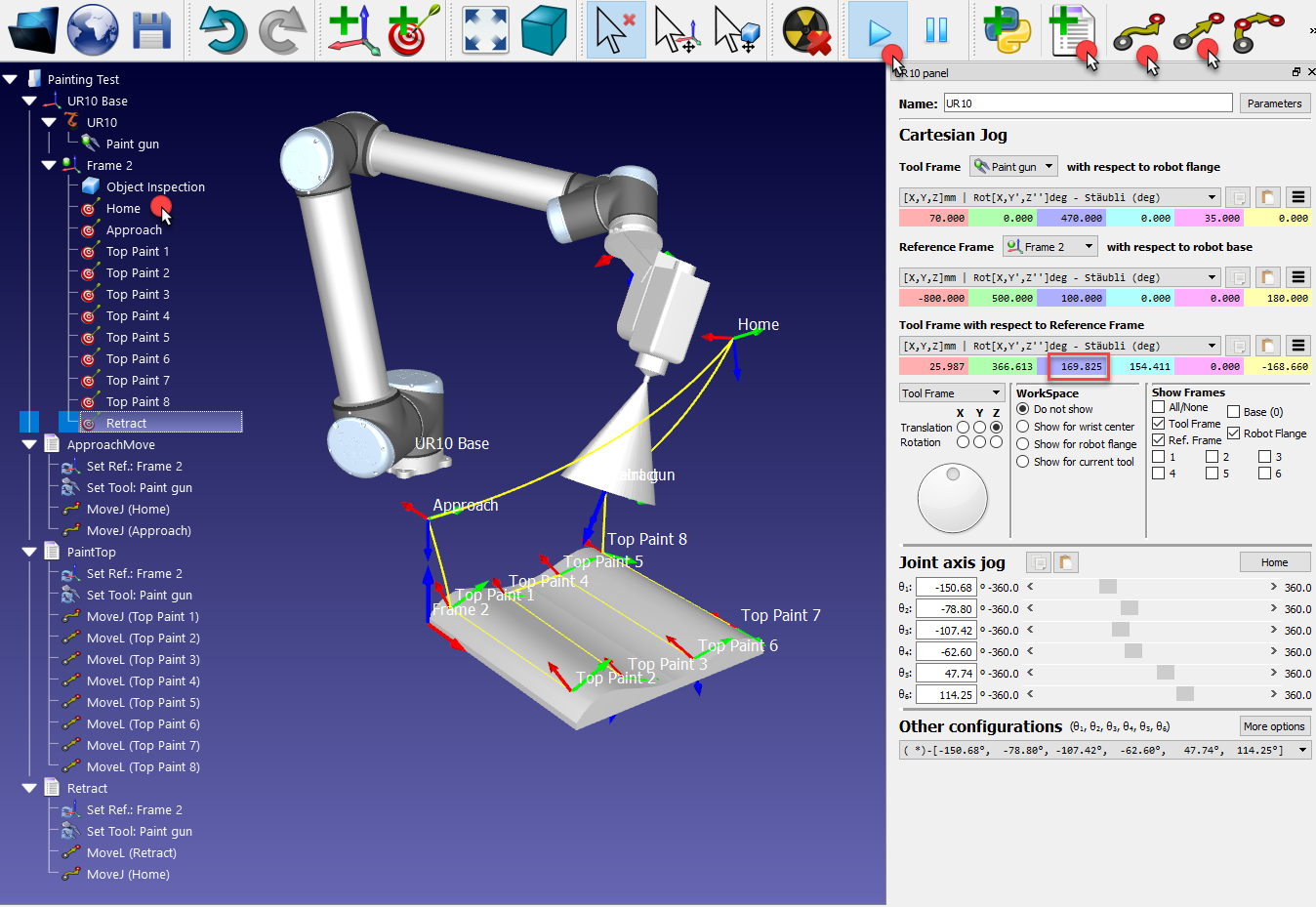
1.En ayant le robot placé sur la dernière cible du programme PaintTop, déplacer le robot vers le haut en faisant augmenter la coordonnée Z du centre de l’outil (TCP) par rapport au repère, dans le panneau-fenêtre du robot (montré en rouge dans l’image suivante).
2.Sélectionner Programme➔
3.Sélectionner Programme➔

4.Sélectionner la cible Home (le robot bougera à cette position).
5.Sélectionner Programme➔
Double cliquer chaque programme individuellement pour le simuler. La simulation peut être accélérée en maintenant la touche Espace ou en sélectionnant le bouton Accélérez la simulation