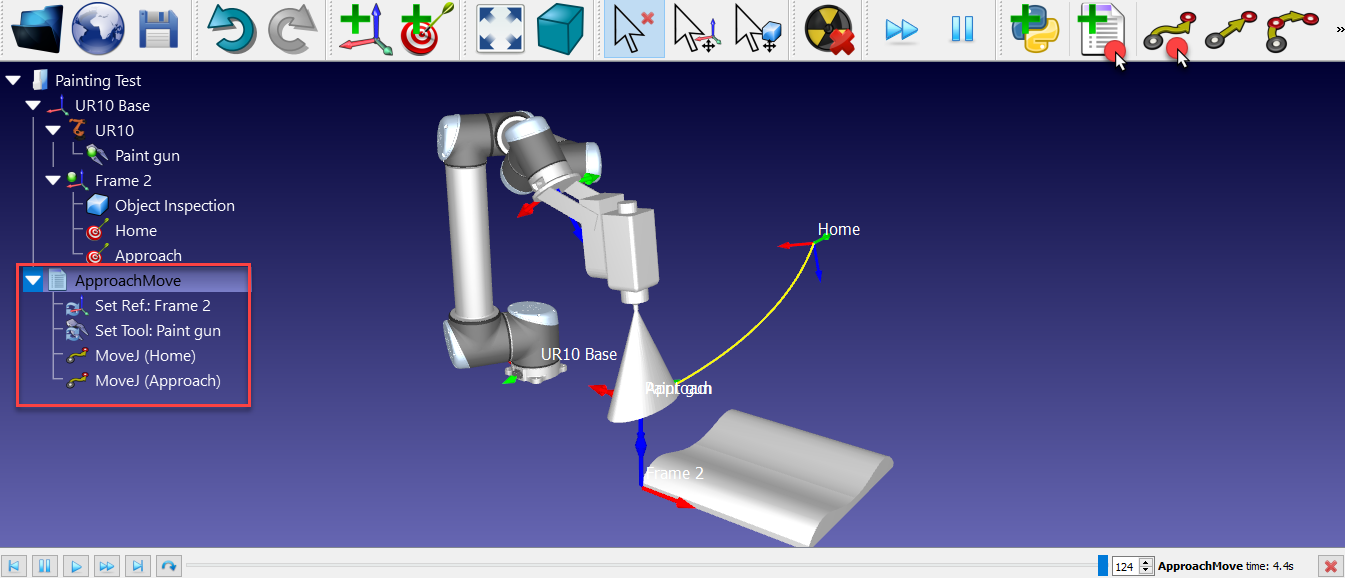
Ajouter un Programme d’Approche
Suivre ces étapes afin de créer un programme qui fait déplacer le robot de la cible Home à la cible Approche :
1.Sélectionner Programme➔
2.Renommer le programme à ApproachMove.
3.Sélectionner la cible Home.
4.Sélectionner Programme➔
Note : Si une cible n’est pas sélectionnée, une nouvelle cible sera créée.
5.Sélectionner la cible Approche.
6.Sélectionner Programme➔
Double clic sur le programme ApproachMove et l’exécution de la simulation débutera. La barre de simulation sera affichée.
Note : Plus d’information sur comment ajouter un programme robotet ajouter des instructionsest disponible dans la section programme robot.