Configurer un TCP relatif
Il est possible de définir un centre d’outil (TCP) par rapport à un autre outil. Par exemple, ceci permet de définir la distance d’une lame de cutter par rapport à son support.
Ces étapes impliquent qu’un deuxième outil TCP soit défini par rapport au premier : prenons une distance de 150mm le long the l’axe Z :
1.Faire un clic droit sur le robot.
2.Sélectionner 
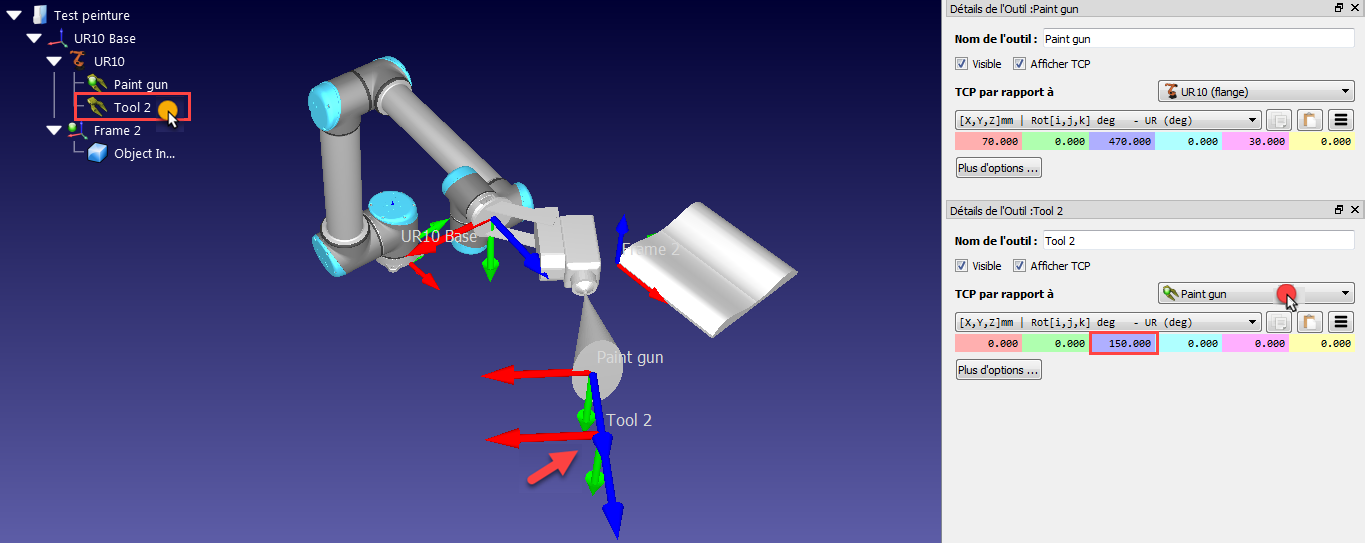
3.Double cliquer sur ce nouveau TCP
4.Sélectionner TCP par rapport à ➔Paint gun
5.Entrer la coordonnée Z à 150 mm et les autres translations et rotations à 0 deg.
Ce nouvel outil ne sera pas utilisé dans les sections suivantes de cet exemple. Cependant, ceci permet d’ajouter un offset sur le vrai robot pour définir la distance de projection de peinture entre l’objet et la pièce à peindre.