Créer un TCP
Un ou plusieurs Centres d’outils robot (TCP) peuvent être créés dans RoboDK. Les outils peuvent être associes à une géométrie importée.
1.Sélectionner Fichier➔
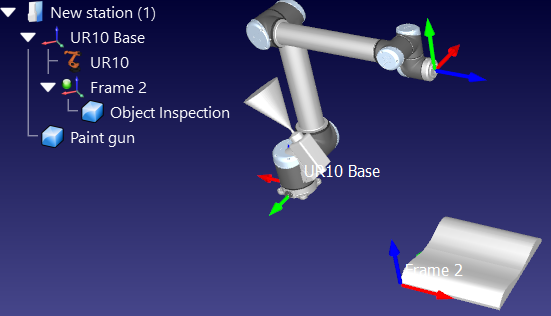
2.Sélectionner le fichier Paint gun.stl afin de l’ajouter comme un objet (il sera ajouté au repère de la station, même position que le repère de base du robot).
3.Dans l’arborescence de la station, faire glisser l’objet vers le robot, tel que montré dans l’image suivante.
Des nouveaux outils peuvent être chargés ou sauvegardés sous format TOOL (.tool).
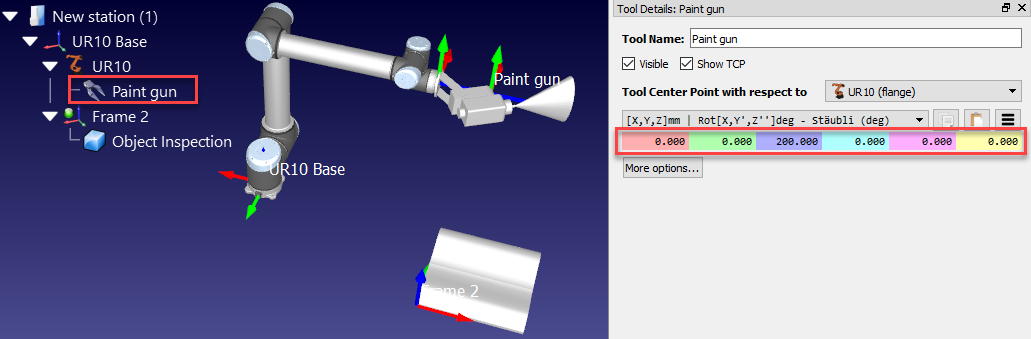
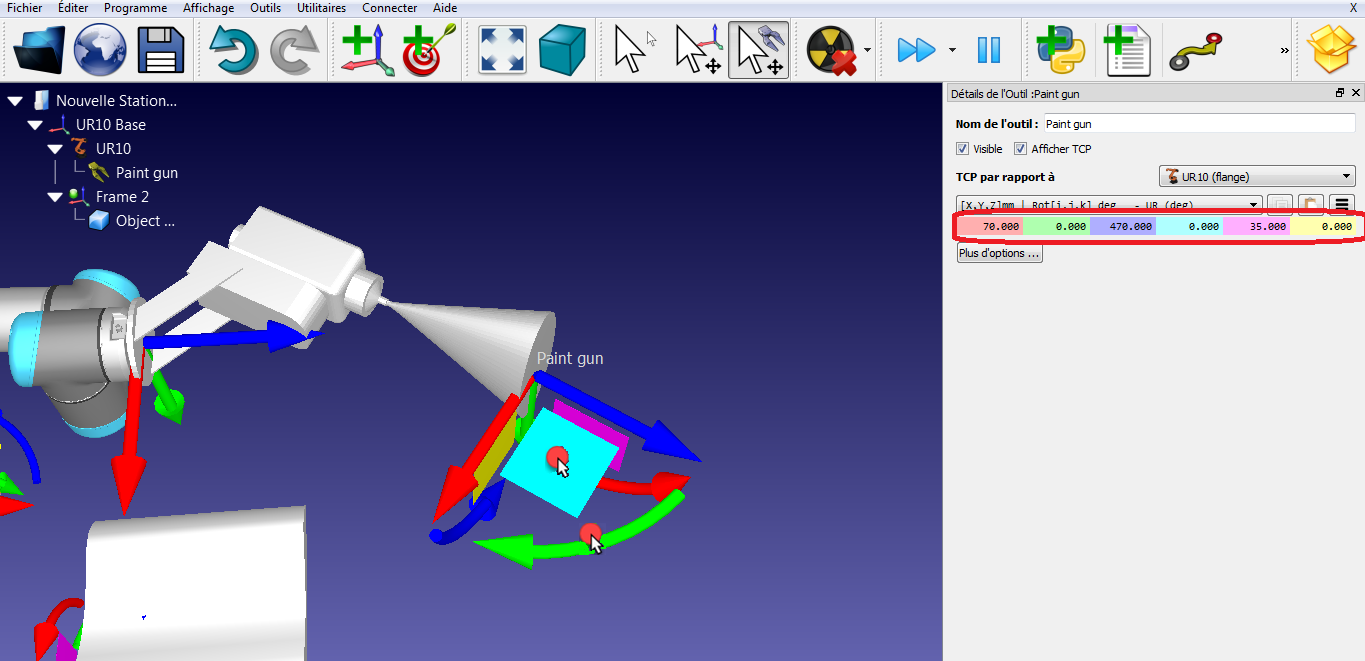
Par défaut, RoboDK défini le centre de l’Outil (ou TCP) à la position (X,Y,Z) = (0,0,200) mm. Cela peut être modifié en fournissant les coordonnées manuellement et/ou en déplaçant le centre d’outil (TCP) tout en gardant la touche Alt+Shift appuyée tel que montré dans l’image suivante.
1.Garder la touche Alt+Shift appuyée ou sélectionner l’icône correspondante 
2.Sélectionner la surface bleue du repère (surface XZ du TCP) et glisser le TCP de façon approximative vers la surface du pistolet à peinture, tel que montré dans l’image suivante.
3.Sélectionner la flèche verte (rotation autour de l’axe Y) pour faire pointer l’axe vers l’extérieur.
4.Aussitôt qu’une valeur approximative des coordonnées de l’outil apparait, il est possible retoucher ces valeurs manuellement avec un double clic sur le pistolet à peinture ou sur le repère de l’outil. La roulette de la souris peut être utilisée sur chaque champ afin de mettre á jour la position sur l’écran.
A ce stade, la station peut être sauvegardée :
1.Sélectionner Fichier➔
2.Sauvegarder le fichier (par exemple, sous, le nom Test de Peinture.rdk). Le titre de la fenêtre et le nom de la station seront mis à jour avec le nom du fichier.
Configurer un TCP relatif
Il est possible de définir un centre d’outil (TCP) par rapport à un autre outil. Par exemple, ceci permet de définir la distance d’une lame de cutter par rapport à son support.
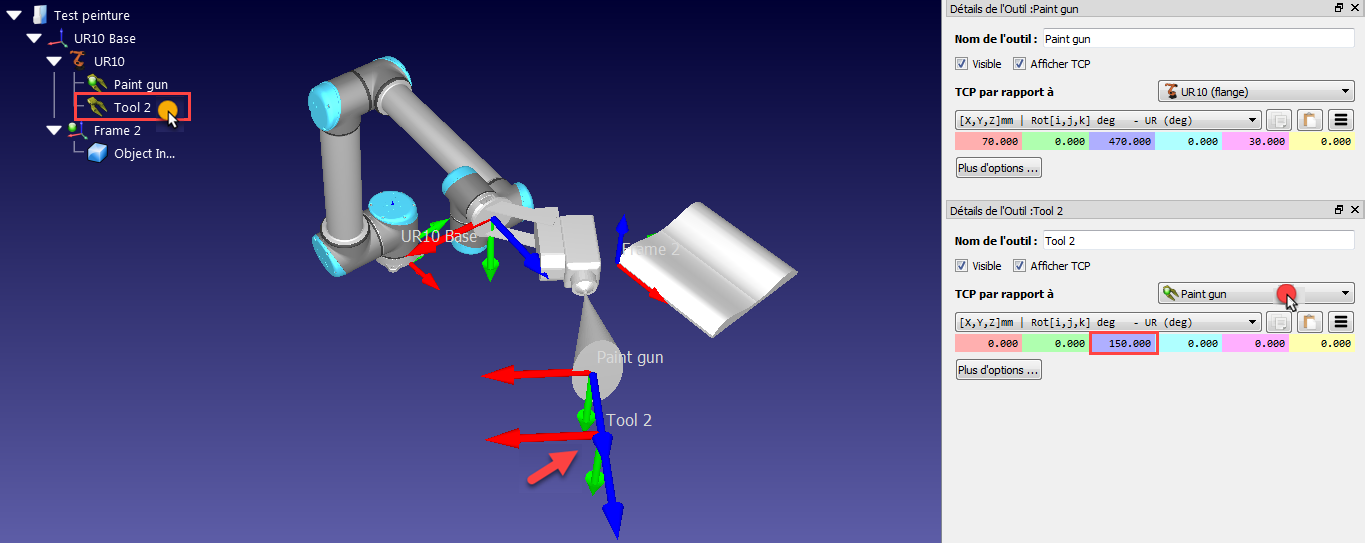
Ces étapes impliquent qu’un deuxième outil TCP soit défini par rapport au premier : prenons une distance de 150mm le long the l’axe Z :
1.Faire un clic droit sur le robot.
2.Sélectionner 
3.Double cliquer sur ce nouveau TCP
4.Sélectionner TCP par rapport à ➔Paint gun
5.Entrer la coordonnée Z à 150 mm et les autres translations et rotations à 0 deg.
Ce nouvel outil ne sera pas utilisé dans les sections suivantes de cet exemple. Cependant, ceci permet d’ajouter un offset sur le vrai robot pour définir la distance de projection de peinture entre l’objet et la pièce à peindre.
Déplacer la géométrie de l’outil
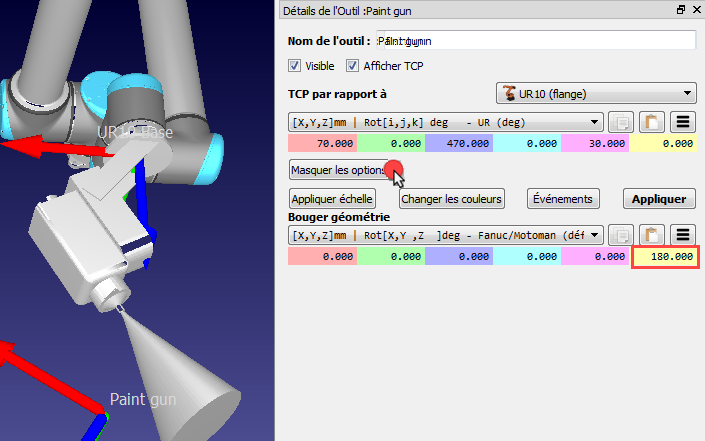
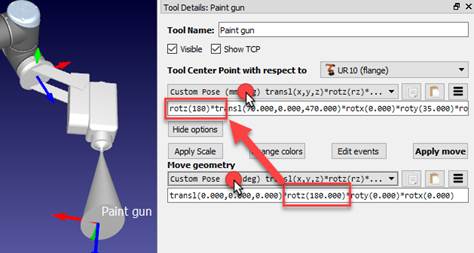
Il se peut que la géométrie de l’outil ne soit pas alignée par rapport à la bride du robot lorsqu’elle est chargée dans RoboDK. Les étapes suivantes montrent qu’une erreur a été réalisée et que l’outil est monté à 180 degrés autour de l’axe Z. Voici les étapes pour corriger cette erreur :
1.Sélectionner Plus d’options … dans la fenêtre Détails de l’Outil.
2.Entrer 180 deg dans la case jaune (rotation Z) de la géométrie du pistolet à peinture, tel que montré dans l’image suivante. La roulette de la souris peut être utilisée en survolant chaque case avec le pointeur de la souris pour mettre à jour la position sur l’écran rapidement.