Déplacer la géométrie de l’outil
Il se peut que la géométrie de l’outil ne soit pas alignée par rapport à la bride du robot lorsqu’elle est chargée dans RoboDK. Les étapes suivantes montrent qu’une erreur a été réalisée et que l’outil est monté à 180 degrés autour de l’axe Z. Voici les étapes pour corriger cette erreur :
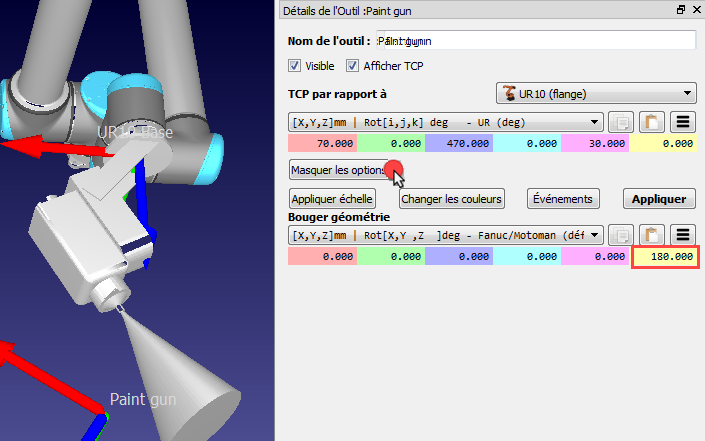
1.Sélectionner Plus d’options … dans la fenêtre Détails de l’Outil.
2.Entrer 180 deg dans la case jaune (rotation Z) de la géométrie du pistolet à peinture, tel que montré dans l’image suivante. La roulette de la souris peut être utilisée en survolant chaque case avec le pointeur de la souris pour mettre à jour la position sur l’écran rapidement.
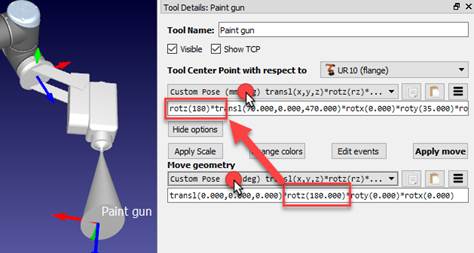
Astuce : Si le centre d’outil (TCP) a été défini avant cette opération, le TCP ne sera plus concordant avec la géométrie de l’outil. Pour mettre à jour la position du TCP au bon endroit, les étapes décrites au début de cette sectionpeuvent être suivies (en gardant la touche Alt appuyé ou en rentrant les valeurs manuellement). De façon similaire, le TCP peut être bougé autour de la bride du robot en sélectionnant la méthode de représentation Script (tel que montré dans l’image suivante) et en insérant la rotation Z en prémultipliant la définition du TCP (au début de la définition du TCP).
Note : Pour plus d’information ‘comment définir des transformations et poses’ visiter la section repères.