Générer un Programme Robot
Il est possible d’exporter des programmes robot individuellement, ou le programme principal incluant les sous-programmes :
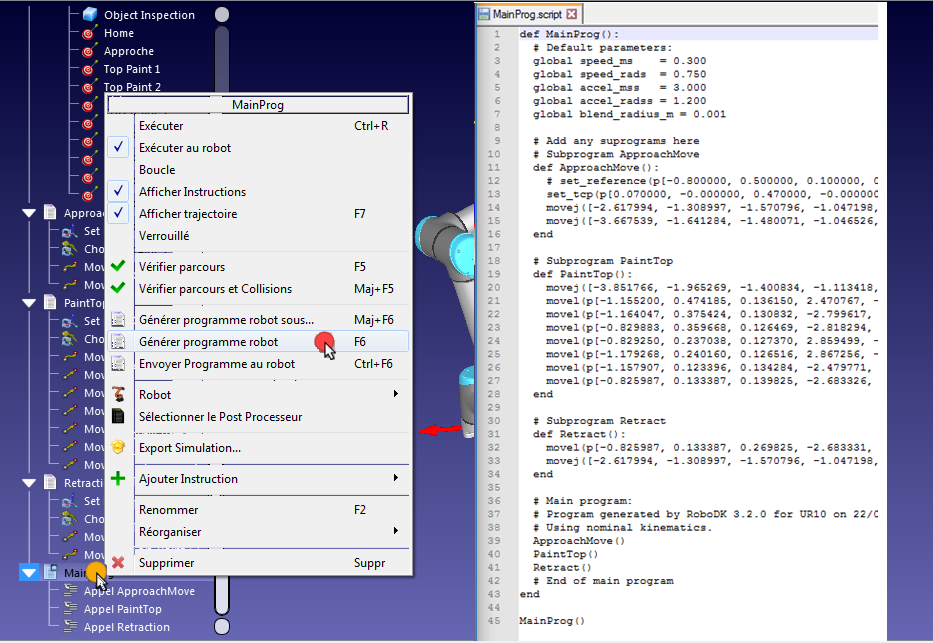
1.Faire clic droit sur un programme (MainProg par exemple).
2.Sélectionner Générer programme robot (F6) ou sélectionner Générer programme robot sous… (Shift + F6) pour spécifier l’endroit du (des) fichier(s) généré(s).
3.Le programme SCRIPT pour le robot Universal Robots sera automatiquement affiché dans un éditeur de texte.
Ce fichier est le résultat de la génération du programme robot hors-ligne. Le fichier peut être envoyé au contrôleur robot afin d’exécuter les mouvements simulés dans RoboDK.
1.Sélectionner Envoyer programme au robot (Ctrl + F6) afin d’envoyer par le biais d’un réseau FTP (programmation hors ligne)
2.Vérifier l’option Exécuter au robot afin de faire avancer le programme étape par étape à chaque fois que le programme est démarré (programmation en ligne). Cela permet d’exécuter le programme sur le robot et en même temps de visualiser la simulation. Les drivers du robot sont nécessaires pour la programmation en ligne.
Il est possible de changer les post processeur et customiser la façon de générer les programmes :
1.Faire un clic droit sur un programme ou un robot.
2.Sélectionner 
3.Sélectionner Universal Robots URP
Générer le programme de nouveau. Dans cet exemple, le post processeur d’origine utilise des valeurs joint pour définir chaque mouvement linéaire et le deuxième post processeur utilise des coordonnées cartésiennes pour définir chaque mouvement linéaire.