Importer des objets 3D
RoboDK supporte la plupart des formats standard 3D, incluant les formats STL, STEP (ou STP) et IGES (IGS), WRML, 3DS ou OBJ. (les fichiers STEP et IGES ne sont pas supportés sur la version Mac et Linux). Pour ouvrir un nouveau fichier 3D :
1.Sélectionner Fichier➔
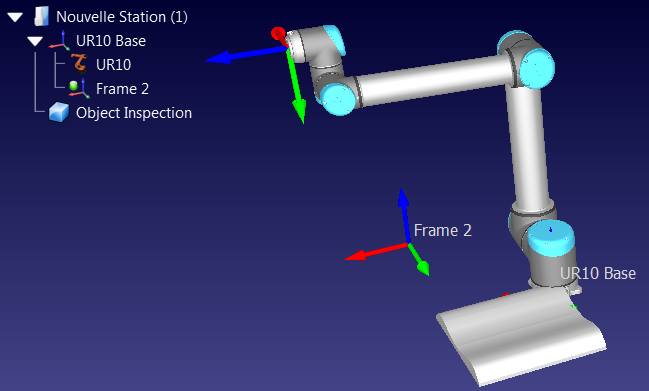
2.Cliquer sur l’objet Object Inspection, disponible dans la bibliothèque RoboDK par défaut :
C:/RoboDK/Library/Object Inspection.stp.
3.Possibilité de faire glisser les fichiers sur l’écran principal pour les importer.
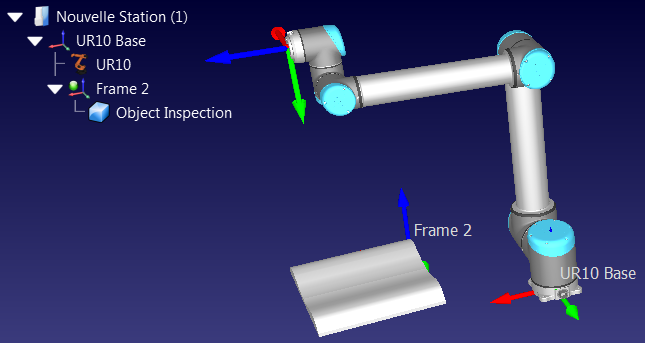
4.Dans l’arborescence de la station, faire glisser l’objet vers le repère Frame 2.
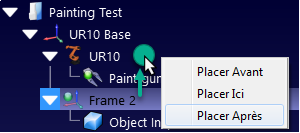
Astuce : Faire glisser l’objet avec le bouton droit de la souris appuyé pour réorganiser les objets à l’intérieur de l’arborescence.
Vidéo : Comment importer des objets et créer des outils (vidéo en langue Anglaise): https://www.youtube.com/watch?v=ilmJSD-a9bs&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=5.
Important : Il est important de placer les objets imbriqués dans le repère pour renseigner les cibles par rapport à l’objet. Ensuite, si le repère est déplacé, les cibles se déplacent en même temps.
Astuce : Pour des fichiers STEP ou IGES très volumineux il est possible d’accélérer la vitesse d’importation en sélectionnant Outils➔Options➔CAO➔Paramètres d’importation rapide. Plus d’information sont disponibles dans la Section STEP/IGES.
Astuce :Bien que les objets puissent être déplacés par rapport au repère auquel ils sont rattachés (avec un double clic sur l’objet et en entrant les coordonnées), il est recommandé de les placer par rapport au repère donné et de déplacer le repère à la place. Cela permet de faire correspondre correctement la référence de l’objet en mettant simplement à jour le repère depuis/vers le contrôleur du robot.