Cibles Robot
Les cibles robot vous permettent d’enregistrer des positions de robot spécifiques afin que le robot puisse se déplacer à ces endroits.
Suivre ces étapes pour ajouter une nouvelle cible et voir les informations qui y sont jointes :
●Sélectionner Programme➔
Cela enregistrera la position actuelle du robot en utilisant le repère actif 

●Clic droit sur une cible, ensuite choisir Options… (F3) pour voir les coordonnées enregistrées et les valeurs des Joints.
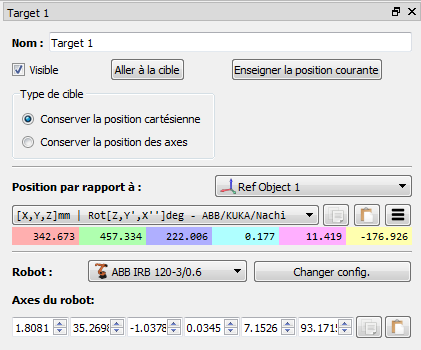
La création d’une nouvelle cible enregistre le TCP par rapport au repère de référence dans l’espace cartésien ainsi que les axes du robot actuels. Par défaut, RoboDK créé des cibles comme cibles cartésiennes
Il est aussi possible de spécifier la cible dans l’espace Joints (Keep joint values 
Il est courant d’utiliser des cibles pour atteindre une première position d’approche près de la zone de travail, puis les cibles en coordonnées cartésiennes assurent que le parcours d’outils n’est pas modifié même si le repère de référence ou le repère d’outils sont modifiés.
Il est possible de voir d’autres configurations pour atteindre la même position avec le robot. Plus d’informations dans la section suivante.