Configurations Robot
Une configuration robot définit un état spécifique du robot. Changer la configuration nécessite de croiser une singularité. Les contrôleurs de robot ne peuvent pas croiser une singularité lorsqu’un mouvement linéaire est en cours de réalisation (un mouvement articulaire est nécessaire pour cela).
En d’autres termes, pour accomplir un mouvement linéaire entre deux cibles, la configuration du robot doit être la même pour le mouvement complet, y compris les premiers et derniers points.
Faire un clic droit sur un robot et sélectionner Modifier la configuration pour ouvrir la fenêtre de configuration du robot. Il est également possible d’ouvrir cette fenêtre en sélectionnant Plus d’options dans le panneau/fenêtre du robot.
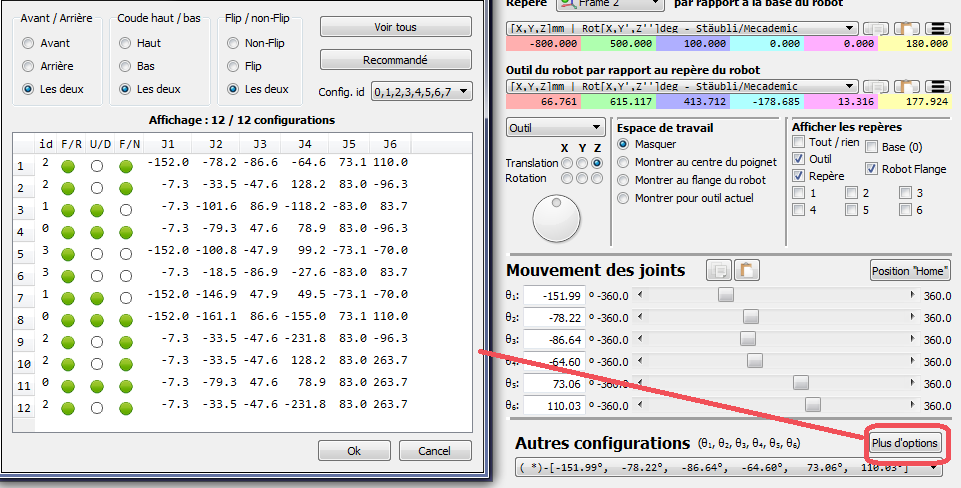
Pour un robot 6 axes standard, il y a généralement 8 configurations différentes pour n’importe quelle position du robot si nous supposons que chaque axe de robot peut bouger un tour complet. Dans la pratique, les limites des articulations peuvent être plus ou moins contraintes selon le robot. Par conséquent, il peut être possible d’avoir de 1 à plus de 100 configurations de robot différentes pour un emplacement spécifique en fonction du robot.
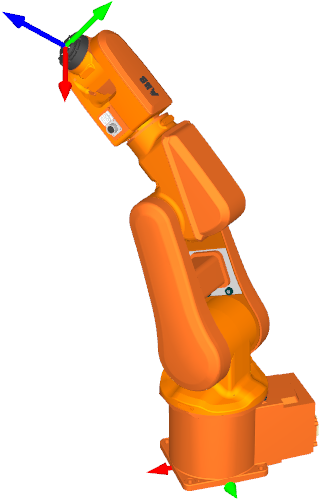
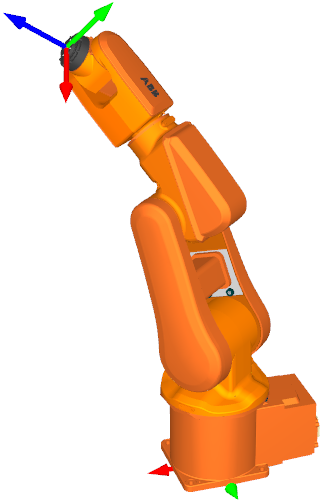
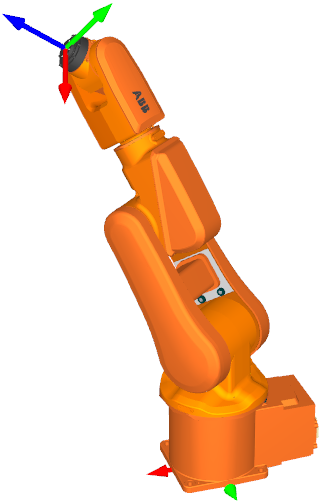
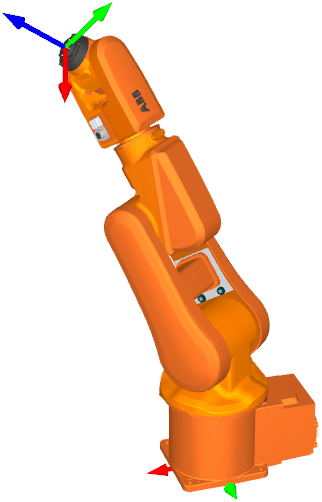
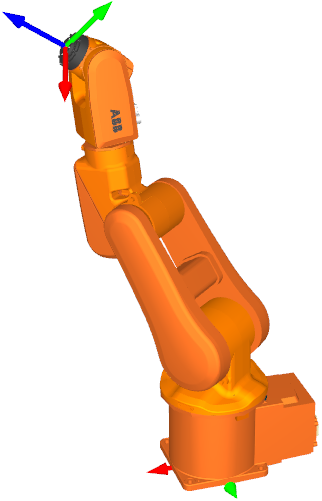
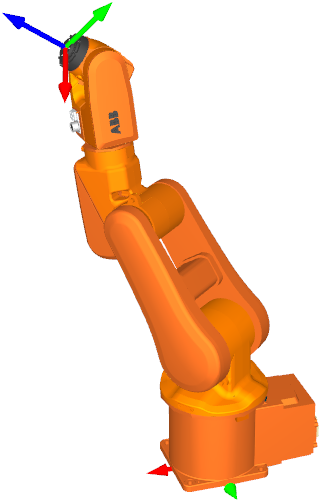
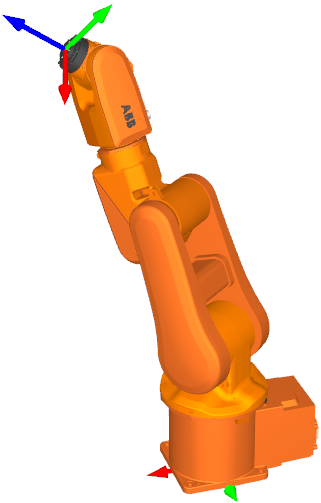
Une configuration de robot définit une manière spécifique (mode d’assemblage) d’atteindre une position avec le robot. Par exemple, le robot peut avoir le coude vers le haut ou vers le bas (Haut vs. Bas, ou U/D), en même temps il peut être face à la cible ou la base peut tourner de 180 degrés pour atteindre la cible vers l’arrière (Avant vs. Arrière, ou F/R). Enfin, le joint 5 peut basculer en changeant de côté et en même temps l’axe 4 et l’axe 6 compensent ce mouvement (Flip vs. Non-flip, ou F / N). Au total, cela fournit les 2*2*2=8 configurations.