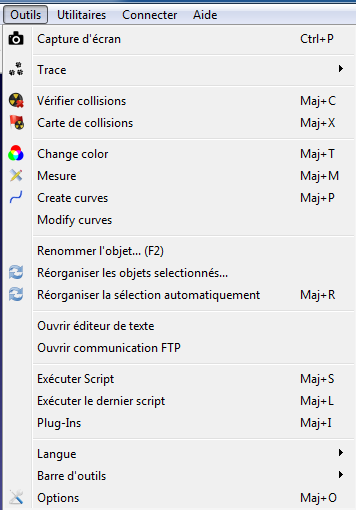
Des outils génériques sont disponibles dans le menu Outils, comme la prise de clichés de la vue 3D, l’activation du tracé du robot, la vérification de collision ou la mesure des coordonnées des points.
L’activation de Trace montrera la trajectoire des robots lorsqu’ils bougent.
Vérifier collisions active ou désactive la vérification des collisions. Lorsque la vérification des collisions est activée, les objets qui sont en état de collision s’affichent en rouge. La carte de collisions permet de spécifier quelles interactions d’objets sont vérifiées.
Note : Plus d’informations disponible à propos de la détection de collisions dans la section Collisions.
Changer les couleurs (Maj+T) affiche une petite fenêtre qui permet de changer la couleur des robots et des objets. Il est également possible de retourner les vecteurs normaux des surfaces.
Mesure affiche une fenêtre qui permet de mesurer les points en 3D par rapport à un repère local ou au repère de la station (mesures absolues).
Il est possible de spécifier la langue du logiciel RoboDK en sélectionnant Outils ➔ Langue. Robodk s’affiche immédiatement dans la langue sélectionnée.
Barre d’Outils permet de configurer la barre d’outils par défaut. Il est aussi possible de spécifier une barre d’outils pour une utilisation plus basique ou plus avancée.
Sélectionner Options afin d’ouvrir le menu des options. Plus d’information disponible dans la section Options Menu.