Le menu principal contient toutes les options disponibles. Le menu principal est divisé dans les sections suivantes :
●Fichier :Permet l’importation de nouveaux fichiers (3D, robots, outils, trajectoires, …) et d’ouvrir ou sauvegarder les projets RoboDK (extension RDK).
●Éditer :Permet de couper/copier/coller un objet ou un groupe d’objet et de défaire une action.
●Programme :Permet de créer ou modifier un programme robot et d’autres options pour la programmation Hors ligne.
●Affichage :Propose des actions utiles pour la navigation 3D et le paramétrage de vues.
●Outils :Propose les outils généraux tel que la vérification de collisions, mesure de points, ou les options principales.
●Utilitaires :Permet d’effectuer des opérations spécifiques telles que l’utilisation de robots pour des opérations de fabrication de robot, l’étalonnage d’un TCP ou d’un repère de référence, l’utilisation de robots comme imprimante 3D ou comme CN 5 axes, étalonner un robot... Ces opérations peuvent nécessiter une option de licence spécifique.
●Connecter :Permet de se connecter à un robot, un système de mesure ou de simuler des caméras.
●Aide :Permet d’ouvrir la documentation en ligne (F1), de vérifier les mises à jour ou de configurer une licence.
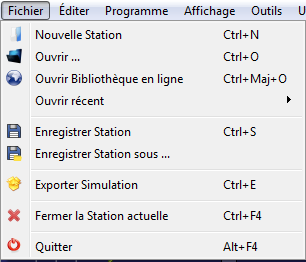
Menu Fichier
Il est possible d’ouvrir, sauvegarder ou exporter des documents depuis le menu Fichier.
Nouvelle Station permet d’ajouter une nouvelle station dans l’arborescence. Une station peut être chargée ou enregistrée en tant que fichier RDK. Le fichier RDK (extension RDK) contient toutes les informations sur les robots et les objets, il n’est donc pas nécessaire de conserver une copie séparée des éléments importés.
Astuce : Il est possible d’avoir plus d’une station ouverte en même temps. Un double clic sur l’icône de la station dans l’arborescence affichera cette station.
Ouvrir permet de charger un nouveau fichier RoboDK (RDK Station) ou importera tout autre format de fichier reconnu, tel que .robot pour les fichiers de robot, STEP/IGES/STL pour les objets, .outil pour les fichiers d’outils, etc.
Ouvrir Bibliothèque en Ligne permet d’afficher une nouvelle fenêtre avec la bibliothèque disponible en ligne.
Enregistrer Station permet de sauvegarder le fichier RDK. Sélectionner Enregistrer Station sous… afin de choisir l’endroit de sauvegarde.
Faire une station demo permet d’exporter la station en un fichier EXE avec une version simplifié de RoboDK.
Exporter Simulation permet d’exporter un programme ou une simulation 3D PDF ou un fichier 3D HTML. Exemple.
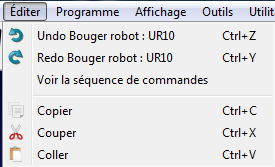
Menu Editer
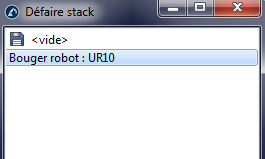
Annuler (Ctrl+Z) et Rétablir (Ctrl+Y) sont accessibles depuis le menu Editer. L’historique des actions d’annulation est également disponible et permet de revenir en arrière ou en avant à un état spécifique en sélectionnant l’action.
Il est aussi possible de couper (Ctrl+X), copier (Ctrl+C) ou coller (Ctrl+V) un objet ou un groupe d’objets depuis l’arborescence de la station. Si un objet est copié, tous les objets rattachés seront aussi copiés.
Astuce : Il est possible de regrouper des actions similaires en une seule. Par exemple, si le robot est déplacé manuellement, chaque petite étape est enregistrée (par défaut). Afin de regrouper toutes les petites étapes en une : sélectionner Outils➔Options➔Général et cocher Grouper les actions similaires.
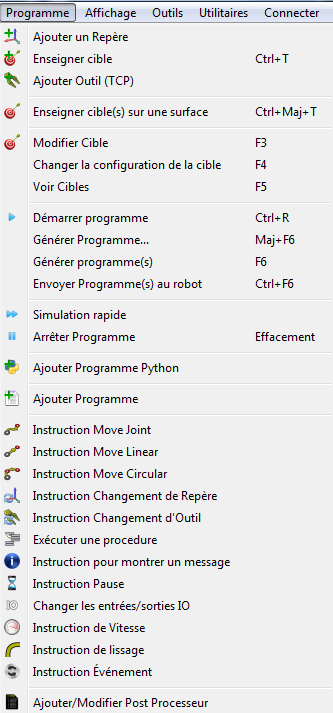
Menu Programme
Le menu de programme contient tous les composants liés à la programmation hors ligne (PHL) et la génération de programmes. Il est possible d’ajouter de nouveaux programmes, référentiels, cibles ou outils aux robots. Ces composants de programmation hors ligne (repères, outils, cibles, etc.) apparaissent sur tous les programmes générés hors ligne.
Ajouter un repère permet d’ajouter un nouveau repère de référence attaché à la racine de la station ou rattaché à un autre repère si celui-ci était sélectionné.
Ajouter outil (TCP) permet d’ajouter un nouvel outil au robot. Aucune géométrie n’est requise pour ajouter un outil. Plusieurs outils permettent de référencer différentes parties de la même géométrie liées à un outil.
Enseigner Cible (Ctrl+T) permet d’ajouter une nouvelle cible au repère actif de l’outil Robot actif. Le repère actif et l’outil actif peuvent être sélectionnés dans le panneau/fenêtre du robot. Il est également possible de faire un clic droit sur un repère ou un outil pour les rendre actifs.
Enseigner cible(s) sur une surface (Ctrl+Maj+T) permet de sélectionner des points d’un objet pour créer facilement des cibles. Un exemple est disponible dans cette section.
Ajouter Programme permet d’ajouter un nouveau programme qui peut être créé à l’aide de l’interface utilisateur graphique RoboDK (GUI). Aucune expérience de programmation n’est requise pour créer ou modifier ce type de programme robot. Le programme de robot peut être simulé et généré pour un robot spécifique, automatiquement et facilement.
La section Instructions de programme du document Programmation hors ligne fournit plus d’informations sur les instructions de programme disponibles via l’interface utilisateur graphique (GUI).
Ajouter Programme Python promet d’inclure un exemple de programme Python/macro/script/module dans la station qui relie l’API RoboDK. Un programme Python utilisant l’API RoboDK permet de créer des programmes de robots à partir de code de programmation générique (Python). Il est possible de déployer ces programmes pour n’importe quel contrôleur de robot spécifique. Il est également possible de simuler des tâches spécifiques pour étendre les programmes GUI. Ces tâches peuvent être des sous-programmes de robot pour la programmation hors ligne, la programmation en ligne ou tout simplement simuler des événements spécifiques. Ces évènements spécifiques peuvent être de faire apparaître des objets automatiquement à des endroits aléatoires pour une simulation pick and place. Un programme Python est comme un fichier texte intégré dans la station et contient du code Python pour automatiser des tâches spécifiques dans RoboDK. L’API RoboDK est déployée en utilisant Python par défaut, mais d’autres langages de programmation peuvent être utilisés pour interagir avec RoboDK.
Note : La différence entre un programme normal (utilisant Ajouter Programme) généré à l’aide de l’interface utilisateur graphique (GUI) et un programme Python (utilisant Ajouter Programme Python) est que le premier ne nécessite pas d’expérience de programmation. D’autre part, une macro Python utilisant l’API RoboDK permet d’étendre les limites d’un programme généré à l’aide de l’interface utilisateur graphique.
Finalement, il est possible de Ajouter/Modifier Post Processors. Les Post-processeurs définissent la façon dont les programmes sont générés pour un contrôleur de robot spécifique, permettant de prendre en compte la syntaxe propre au fournisseur. Les post-processeurs sont la composante finale du processus de programmation hors ligne.
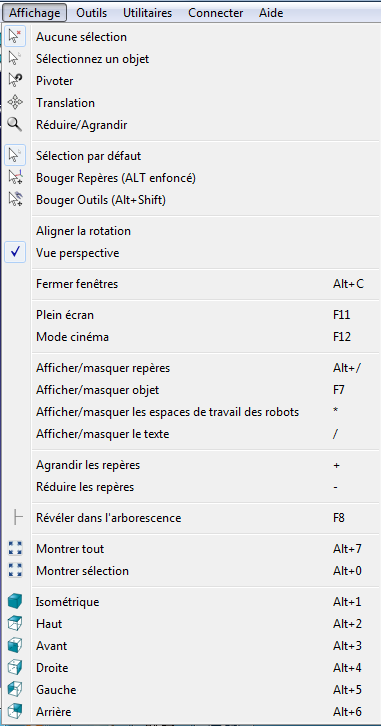
Menu Affichage
La plupart des options nécessaires pour naviguer en 3D sont disponibles dans le menu Affichage. Il est possible de faire pivoter et zoomer à partir de ce menu (ou faire un clic droit sur la vue 3D). Ceci est utile pour naviguer en 3D à l’aide d’un pavé tactile d’ordinateur portable (au lieu d’une souris).
Pour permettre une rotation libre dans n’importe quelle direction, décocher l’option : Affichage ➔ Aligner la rotation. Sinon, RoboDK verrouille la référence de la station pour garder le plan XY horizontal par défaut.
Il est possible d’afficher ou de masquer l’espace de travail du robot en sélectionnant la touche astérisque (*). Il est également possible de basculer entre les éléments visibles et invisibles en sélectionnant la touche F7.
Astuce : Il est possible de rendre les repères plus grands ou plus petits en appuyant sur la touche + ou – plusieurs fois. Si beaucoup d’éléments sont visibles, cela peut être utile pour ajuster la taille des images de référence et les saisir correctement si elles doivent être déplacées dans la vue 3D (ex : maintenir la touche ALT).
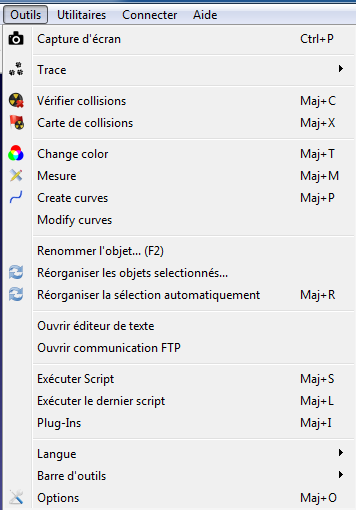
Menu Outils
Des outils génériques sont disponibles dans le menu Outils, comme la prise de clichés de la vue 3D, l’activation du tracé du robot, la vérification de collision ou la mesure des coordonnées des points.
L’activation de Trace montrera la trajectoire des robots lorsqu’ils bougent.
Vérifier collisions active ou désactive la vérification des collisions. Lorsque la vérification des collisions est activée, les objets qui sont en état de collision s’affichent en rouge. La carte de collisions permet de spécifier quelles interactions d’objets sont vérifiées.
Note : Plus d’informations disponible à propos de la détection de collisions dans la section Collisions.
Changer les couleurs (Maj+T) affiche une petite fenêtre qui permet de changer la couleur des robots et des objets. Il est également possible de retourner les vecteurs normaux des surfaces.
Mesure affiche une fenêtre qui permet de mesurer les points en 3D par rapport à un repère local ou au repère de la station (mesures absolues).
Il est possible de spécifier la langue du logiciel RoboDK en sélectionnant Outils ➔ Langue. Robodk s’affiche immédiatement dans la langue sélectionnée.
Barre d’Outils permet de configurer la barre d’outils par défaut. Il est aussi possible de spécifier une barre d’outils pour une utilisation plus basique ou plus avancée.
Sélectionner Options afin d’ouvrir le menu des options. Plus d’information disponible dans la section Options Menu.
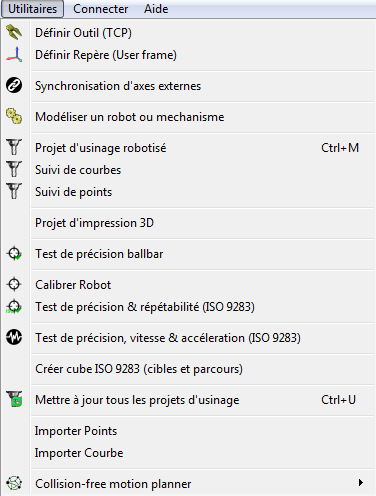
Menu Utilitaires
Le menu Utilitaires permet de réaliser des taches spécifiques :
Définir Outil (TCP) permet de calibrer un TCP de robot en fournissant des données de la configuration réelle, comme les configurations de joint pour atteindre un point en utilisant différentes orientations. Cette procédure est généralement disponible auprès de la plupart des Teach Pendants des robots. RoboDK permet l’étalonnage d’un TCP avec autant de configurations que désiré. L’utilisation d’un grand nombre de configurations permet d’obtenir une valeur TCP plus précise. Plus d’information sur la Calibration TCP.
Définir Repère (User Frame) permet d’identifier un repère par rapport au repère de base du robot. Cela permet de faire correspondre précisément la pièce de la configuration réelle à l’environnement virtuel. Plus d’information sur la calibration d’un repère.
Synchronisation d’axes externes permet de configurer un ou plusieurs axes externes et un robot comme un seul mécanisme de robot. Plus d’information disponible dans la section Axes externes.
Projet d’usinage robotisé peut facilement convertir les parcours d’outils machine en programmes de robots. RoboDK peut importer des programmes pour CNC 5 axes en utilisant un logiciel de FAO, comme le G-code générique ou les fichiers APT. Ces programmes/parcours d’outils peuvent être facilement simulés et convertis en programmes de robots avec RoboDK. Plus d’informations disponible dans cette section.
Le Suivi de courbes ressemble à un projet d’usinage Robot mais il permet de sélectionner des courbes extraites de la géométrie 3D comme le parcours d’outils. Il est également possible de sélectionner Importer Courbes pour importer des courbes 3D à partir de fichiers CSV ou TXT. Ces courbes doivent être fournies sous forme de liste de points XYZ et, en option, de vecteur IJK. Plus d’informations disponibles dans la section Suivi de courbes.
Le Suivi de Point ressemble à un projet de fraisage de robot, mais il permet de sélectionner des points extraits de la géométrie 3D et de créer facilement un parcours d’outils robot. Il est également possible de sélectionner Importer Points pour importer des points 3D à partir de fichiers CSV ou TXT. Ces points doivent être définis sous forme de liste de points XYZ et, éventuellement, de vecteur IJK. Plus d’informations disponible dans la section suivi de point.
Sélectionner Projet d’impression 3D pour générer un programme d’impression 3D robot pour un objet spécifique. L’objet doit être disponible dans la station RoboDK. Le parcours d’outils d’impression 3D est converti en G-code à l’aide d’un logiciel slicer, puis traité comme un parcours d’outils d’usinage 3 axes. Plus d’information sont disponibles dans la section Impression 3D avec robot.
Le Test de précision ballbar permet de vérifier les performances du robot à l’aide d’un appareil télescopique Double Ballbar. Plus d’informations sur les tests du robot Ballbar disponibles ici : https://robodk.com/ballbar-test.
Calibrer Robot permet de configurer un projet d’étalonnage de robot pour améliorer la précision du robot et trouver les paramètres d’erreur du robot. Un robot étalonné peut être utilisé dans n’importe quel projet de programmation hors ligne RoboDK. L’étalonnage du robot améliore généralement la précision du robot par un facteur de 5 ou supérieur, selon le modèle de robot. L’étalonnage du robot nécessite l’utilisation de systèmes de mesure pour effectuer des mesures de robot. La précision et la répétabilité du robot peuvent être testées avec ISO9283 avant et/ou après l’étalonnage. Plus d’informations sur l’étalonnage du robot et les tests de performance ici : https://robodk.com/robot-calibration.
Note : Certains de ces outils peuvent nécessiter une licence spécifique en plus de la licence de programmation hors ligne par défaut.
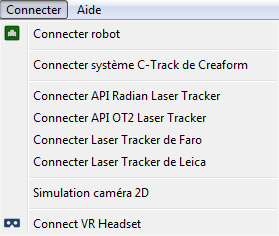
Menu Connecter
Il est possible de se connecter à un robot et de saisir les paramètres de connexion, tels que l’IP du robot, le nom d’utilisateur FTP et le mot de passe FTP. La configuration d’une connexion robot permet de transférer des programmes via FTP ou d’exécuter des programmes directement à partir du PC.
De nouveaux pilotes de robot peuvent être développés par les utilisateurs finaux, plus d’informations disponibles dans la section des pilotes de robot.
Il est également possible de se connecter à des systèmes de mesure tels que les trackers laser ou le CMM optique Creaform. Cela permet d’automatiser entièrement l’étalonnage et les tests de performance du robot.
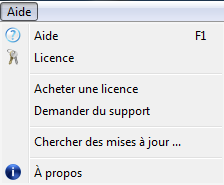
Menu d’Aide
Aide (F1) ouvre cette documentation sur internet. Une version PDF de la documentation est disponible en téléchargement sur le haut de chaque section. En appuyant sur F1, RoboDK affiche l’aide en fonction de la sélection.
Sélectionner Chercher des mises à jour… pour vérifier si une mise à jour est disponible. Un message s’affichera avec une mise à jour recommandée ou vous avisera simplement que la version actuelle est déjà à jour. Si aucun message ne s’affiche, cela signifie qu’un pare-feu bloque la communication entre RoboDK et Internet.