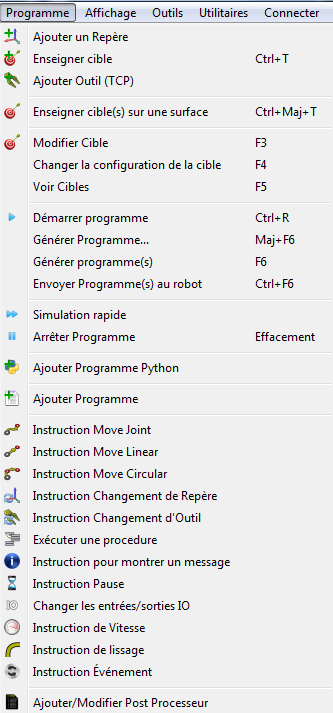
Le menu de programme contient tous les composants liés à la programmation hors ligne (PHL) et la génération de programmes. Il est possible d’ajouter de nouveaux programmes, référentiels, cibles ou outils aux robots. Ces composants de programmation hors ligne (repères, outils, cibles, etc.) apparaissent sur tous les programmes générés hors ligne.
Ajouter un repère permet d’ajouter un nouveau repère de référence attaché à la racine de la station ou rattaché à un autre repère si celui-ci était sélectionné.
Ajouter outil (TCP) permet d’ajouter un nouvel outil au robot. Aucune géométrie n’est requise pour ajouter un outil. Plusieurs outils permettent de référencer différentes parties de la même géométrie liées à un outil.
Enseigner Cible (Ctrl+T) permet d’ajouter une nouvelle cible au repère actif de l’outil Robot actif. Le repère actif et l’outil actif peuvent être sélectionnés dans le panneau/fenêtre du robot. Il est également possible de faire un clic droit sur un repère ou un outil pour les rendre actifs.
Enseigner cible(s) sur une surface (Ctrl+Maj+T) permet de sélectionner des points d’un objet pour créer facilement des cibles. Un exemple est disponible dans cette section.
Ajouter Programme permet d’ajouter un nouveau programme qui peut être créé à l’aide de l’interface utilisateur graphique RoboDK (GUI). Aucune expérience de programmation n’est requise pour créer ou modifier ce type de programme robot. Le programme de robot peut être simulé et généré pour un robot spécifique, automatiquement et facilement.
La section Instructions de programme du document Programmation hors ligne fournit plus d’informations sur les instructions de programme disponibles via l’interface utilisateur graphique (GUI).
Ajouter Programme Python promet d’inclure un exemple de programme Python/macro/script/module dans la station qui relie l’API RoboDK. Un programme Python utilisant l’API RoboDK permet de créer des programmes de robots à partir de code de programmation générique (Python). Il est possible de déployer ces programmes pour n’importe quel contrôleur de robot spécifique. Il est également possible de simuler des tâches spécifiques pour étendre les programmes GUI. Ces tâches peuvent être des sous-programmes de robot pour la programmation hors ligne, la programmation en ligne ou tout simplement simuler des événements spécifiques. Ces évènements spécifiques peuvent être de faire apparaître des objets automatiquement à des endroits aléatoires pour une simulation pick and place. Un programme Python est comme un fichier texte intégré dans la station et contient du code Python pour automatiser des tâches spécifiques dans RoboDK. L’API RoboDK est déployée en utilisant Python par défaut, mais d’autres langages de programmation peuvent être utilisés pour interagir avec RoboDK.
Note : La différence entre un programme normal (utilisant Ajouter Programme) généré à l’aide de l’interface utilisateur graphique (GUI) et un programme Python (utilisant Ajouter Programme Python) est que le premier ne nécessite pas d’expérience de programmation. D’autre part, une macro Python utilisant l’API RoboDK permet d’étendre les limites d’un programme généré à l’aide de l’interface utilisateur graphique.
Finalement, il est possible de Ajouter/Modifier Post Processors. Les Post-processeurs définissent la façon dont les programmes sont générés pour un contrôleur de robot spécifique, permettant de prendre en compte la syntaxe propre au fournisseur. Les post-processeurs sont la composante finale du processus de programmation hors ligne.