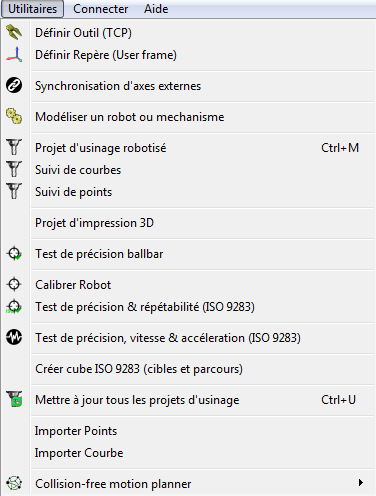
Le menu Utilitaires permet de réaliser des taches spécifiques :
Définir Outil (TCP) permet de calibrer un TCP de robot en fournissant des données de la configuration réelle, comme les configurations de joint pour atteindre un point en utilisant différentes orientations. Cette procédure est généralement disponible auprès de la plupart des Teach Pendants des robots. RoboDK permet l’étalonnage d’un TCP avec autant de configurations que désiré. L’utilisation d’un grand nombre de configurations permet d’obtenir une valeur TCP plus précise. Plus d’information sur la Calibration TCP.
Définir Repère (User Frame) permet d’identifier un repère par rapport au repère de base du robot. Cela permet de faire correspondre précisément la pièce de la configuration réelle à l’environnement virtuel. Plus d’information sur la calibration d’un repère.
Synchronisation d’axes externes permet de configurer un ou plusieurs axes externes et un robot comme un seul mécanisme de robot. Plus d’information disponible dans la section Axes externes.
Projet d’usinage robotisé peut facilement convertir les parcours d’outils machine en programmes de robots. RoboDK peut importer des programmes pour CNC 5 axes en utilisant un logiciel de FAO, comme le G-code générique ou les fichiers APT. Ces programmes/parcours d’outils peuvent être facilement simulés et convertis en programmes de robots avec RoboDK. Plus d’informations disponible dans cette section.
Le Suivi de courbes ressemble à un projet d’usinage Robot mais il permet de sélectionner des courbes extraites de la géométrie 3D comme le parcours d’outils. Il est également possible de sélectionner Importer Courbes pour importer des courbes 3D à partir de fichiers CSV ou TXT. Ces courbes doivent être fournies sous forme de liste de points XYZ et, en option, de vecteur IJK. Plus d’informations disponibles dans la section Suivi de courbes.
Le Suivi de Point ressemble à un projet de fraisage de robot, mais il permet de sélectionner des points extraits de la géométrie 3D et de créer facilement un parcours d’outils robot. Il est également possible de sélectionner Importer Points pour importer des points 3D à partir de fichiers CSV ou TXT. Ces points doivent être définis sous forme de liste de points XYZ et, éventuellement, de vecteur IJK. Plus d’informations disponible dans la section suivi de point.
Sélectionner Projet d’impression 3D pour générer un programme d’impression 3D robot pour un objet spécifique. L’objet doit être disponible dans la station RoboDK. Le parcours d’outils d’impression 3D est converti en G-code à l’aide d’un logiciel slicer, puis traité comme un parcours d’outils d’usinage 3 axes. Plus d’information sont disponibles dans la section Impression 3D avec robot.
Le Test de précision ballbar permet de vérifier les performances du robot à l’aide d’un appareil télescopique Double Ballbar. Plus d’informations sur les tests du robot Ballbar disponibles ici : https://robodk.com/ballbar-test.
Calibrer Robot permet de configurer un projet d’étalonnage de robot pour améliorer la précision du robot et trouver les paramètres d’erreur du robot. Un robot étalonné peut être utilisé dans n’importe quel projet de programmation hors ligne RoboDK. L’étalonnage du robot améliore généralement la précision du robot par un facteur de 5 ou supérieur, selon le modèle de robot. L’étalonnage du robot nécessite l’utilisation de systèmes de mesure pour effectuer des mesures de robot. La précision et la répétabilité du robot peuvent être testées avec ISO9283 avant et/ou après l’étalonnage. Plus d’informations sur l’étalonnage du robot et les tests de performance ici : https://robodk.com/robot-calibration.
Note : Certains de ces outils peuvent nécessiter une licence spécifique en plus de la licence de programmation hors ligne par défaut.