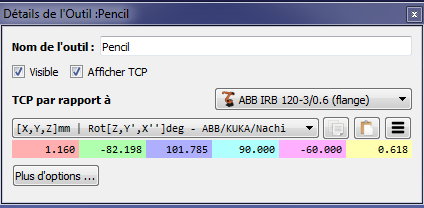
Outil Robot (TCP)
Double-cliquer l’Outil Robot 
Note : La position TCP peut aussi être modifié depuis le Panneau/fenêtre du Robot.
Sélectionner Plus d’options… permet d’appliquer un facteur d’échelle à la géométrie de l’outil ou de déplacer la géométrie par rapport à la bride du robot. La modification de ces valeurs n’a aucun impact sur les programmes de robot. La géométrie est utilisée à des fins d’affichage et de vérification de collision. (Maintien du TCP intact).
Astuce : Il est possible de définir la position du TCP par rapport à un autre TCP en sélectionnant cette référence TCP au lieu de la bride du robot. Par exemple, un outil de coupe peut être défini à une distance spécifique le long de l’axe Z par rapport à un autre TCP qui représente la broche. Cet exempleapporte plus d’informations.
Vidéo : La vidéo suivante donne un aperçu général de l’Outil Robot (TCP) :
https://www.youtube.com/watch?v=FltOFBCzx-w&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=11