Panneau/fenêtre Robot
Double-cliquer sur un robot dans l’arborescence des éléments (ou dans la vue 3D) pour ouvrir le panneau/fenêtre du robot. Il est possible de bouger les axes du robot à partir de la section JOG du mouvement des joints et d’entrer des valeurs de joint spécifiques dans les zones de texte. Ces valeurs et la position du robot correspondent aux valeurs du contrôleur du robot.
Double-cliquer sur les limites des joints pour modifier les limites de l’axe du robot. Par défaut, RoboDK utilise les limites matérielles des spécifications du fabricant du robot. Certaines applications peuvent nécessiter des limites d’axe plus contraignantes (limites logicielles). Les valeurs des Joints peuvent être copié 

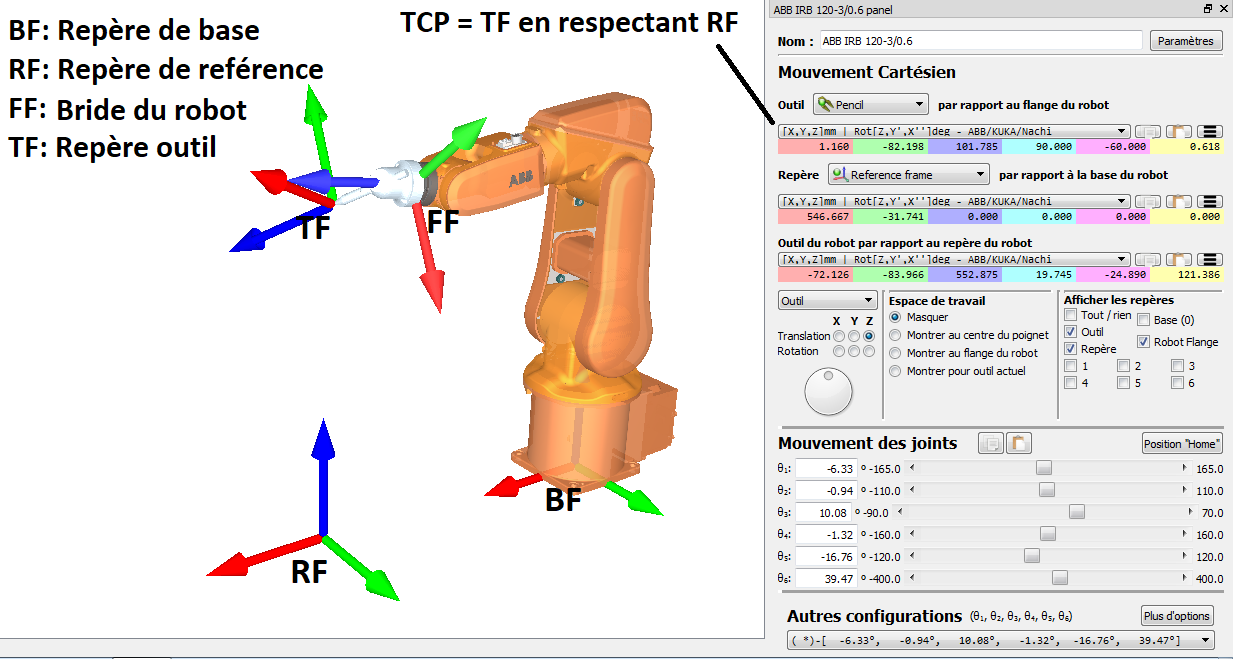
La section Mouvement Cartesien affiche toutes les informations relatives à la cinématique du robot :
●Le repère de l’outil (TF) par rapport à la bride du robot (FF) définit l’emplacement du repère de l’outil sélectionné par rapport à la bride du robot. La bride du robot est toujours la même, cependant, le repère de l’outil change en fonction de l’outil qui est monté sur le robot. Cette relation est également connue comme UTOOL, Tooldata ou simplement Tool dans la plupart des contrôleurs de robots. L’outil du robot est également connu sous le nom de TCP (Tool Center Point). L’outil sélectionné devient l’outil « actif ». L’outil actif est utilisé lors de la création de nouvelles cibles et de nouveaux programmes. L’outil sélectionné affiche une marque verte sur son icône : 
●Le repère de référence (RF) par rapport à la base du robot (BF) définit l’emplacement du repère de référence par rapport au repère de base du robot. Le repère de base du robot ne bouge jamais, cependant, différents repères de référence peuvent être utilisés pour positionner des objets par rapport au même repère de base du robot. Cette relation est également connue comme UFRAME, Workobject MFRAME ou Reference dans la plupart des contrôleurs de robot. Le repère de référence sélectionné dans le panneau/fenêtre du robot devient le repère de référence « Actif ». Le repère de référence actif est utilisé comme référence pour les nouvelles cibles et les programmes robot. Le repère de référence sélectionné affiche une marque verte sur son icône: 
●Le repère d’outils (TF) par rapport au repère de référence (RF) montre la position du TCP actif par rapport au repère de référence actif dans la position actuelle du robot. Modifier cette valeur pour déplacer le robot. Les axes des articulations sont recalculés automatiquement. Ces coordonnées cartésiennes sont enregistrées lorsqu’une nouvelle cible est créée (Programme➔Enseigner cible), ainsi que les axes du robot. La cible est également attachée au repère de référence actif.
Une liste des configurations possibles est disponible dans la section Autres configurations. La configuration du robot définit un état spécifique du robot sans croiser aucune singularité. Changer la configuration nécessite de croiser une singularité. Plus d’informations disponibles dans la section Configuration du robot.
Enfin, le bouton Paramètres en haut à droite permet d’effectuer quelques réglages cinématiques, en sélectionnant le post-processeur préféré ou en extrayant des paramètres précis après un projet d’étalonnage robot. Il est nécessaire de modifier ces valeurs que dans des circonstances particulières.