Repère de Reference
Double-cliquer sur un repère de référence
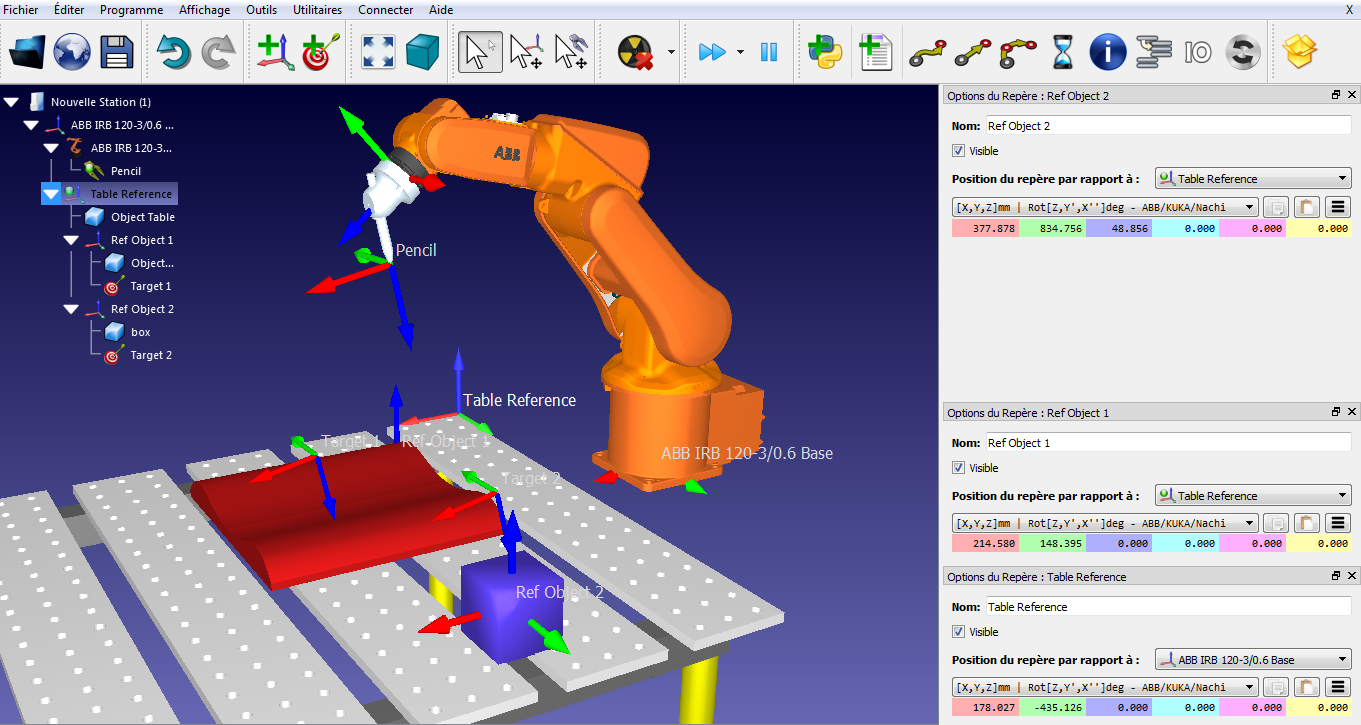
Plusieurs repères peuvent être liés les uns aux autres pour construire la dépendance qui existe dans une application réelle. Par exemple, une table peut avoir une position spécifique par rapport au robot. Ensuite, deux objets ou plus sur la table peuvent avoir une position spécifique par rapport au repère de la table. Le déplacement de la référence de la table ne modifie pas la relation entre les objets et la table, mais modifie la relation de tous les objets par rapport au robot. L’image suivante montre un exemple.