Exemple de client OPC UA
Cet exemple vous montrera comment vous pouvez ajouter une connectivité client OPC-UA à RoboDK. RoboDK comprend un Add-in OPC-UA qui vous permet d'ajouter la compatibilité OPC UA à vos projets RoboDK.
Dans cet exemple, vous apprendrez comment obtenir les données de la station RoboDK via le client OPC UA.
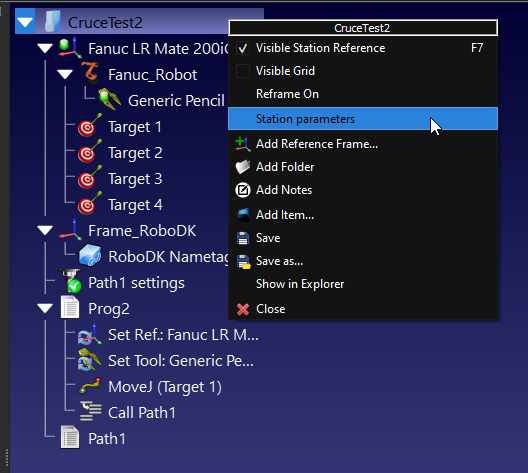
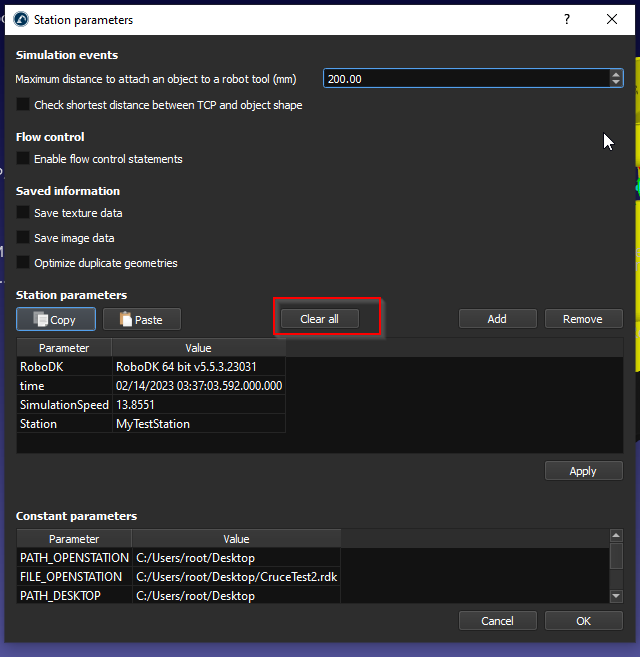
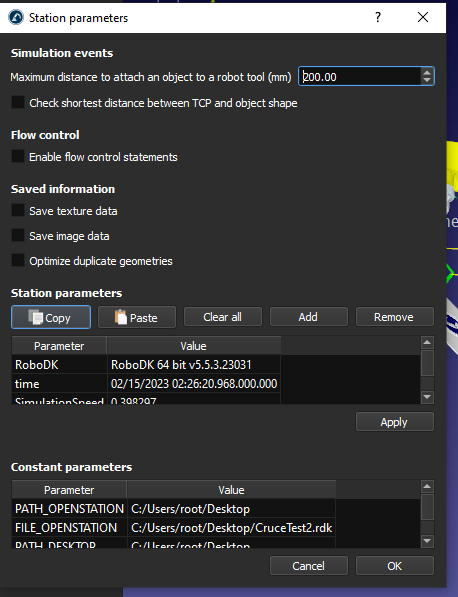
L'écran des paramètres de la station s'affiche et appuyez sur "Effacer tout" pour supprimer tous les paramètres de la station.
Mise en œuvre avec l'interface
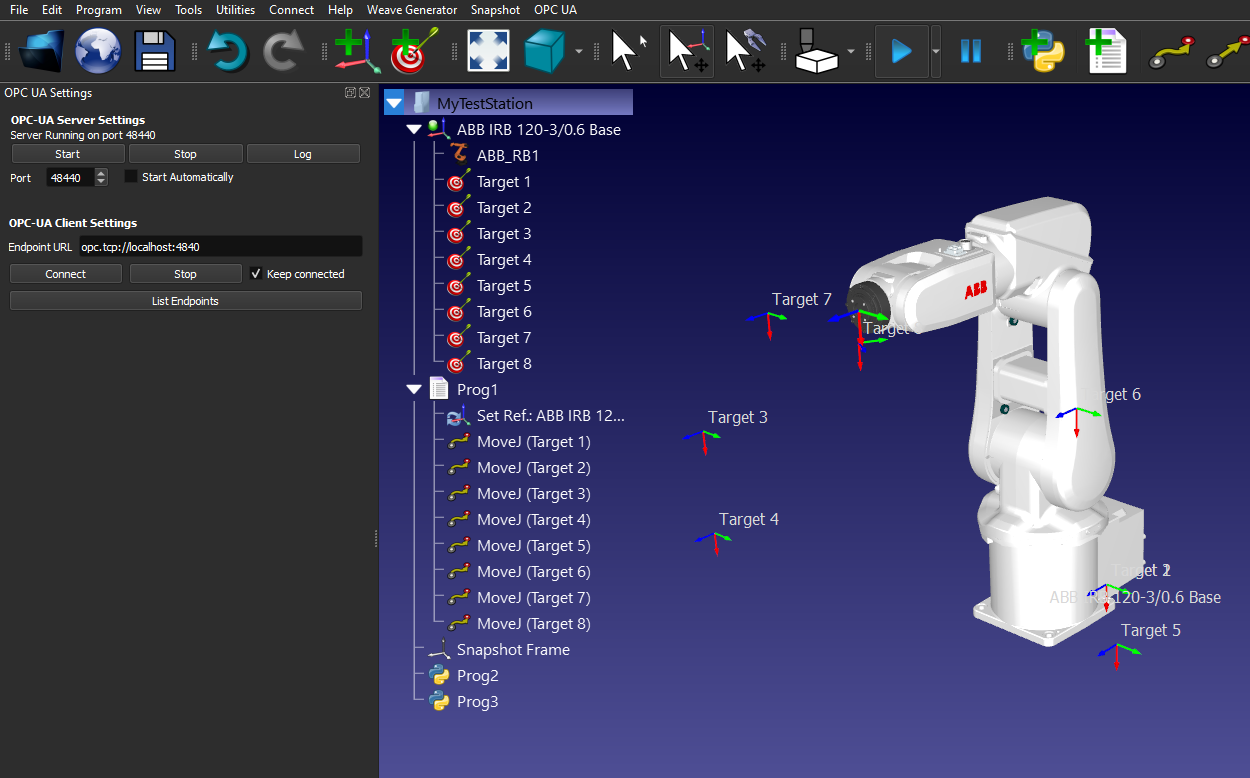
Nous pouvons créer un autre projet RoboDK avec le serveur OPC UA configuré et démarré.
Add-in client
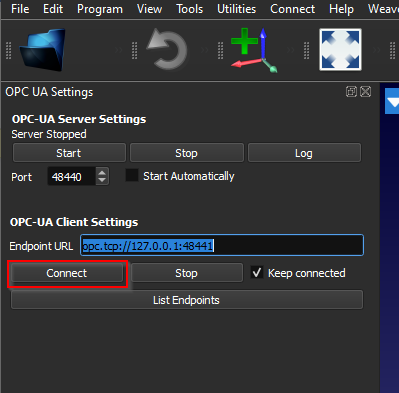
Cette section explique comment ajouter un client OPC UA.
Saisissez l'URL du point de terminaison, par exemple : opc.tcp://127.0.0.1:48441.
Vous devez faire correspondre l'adresse IP et la configuration du port à votre serveur OPC UA cible.
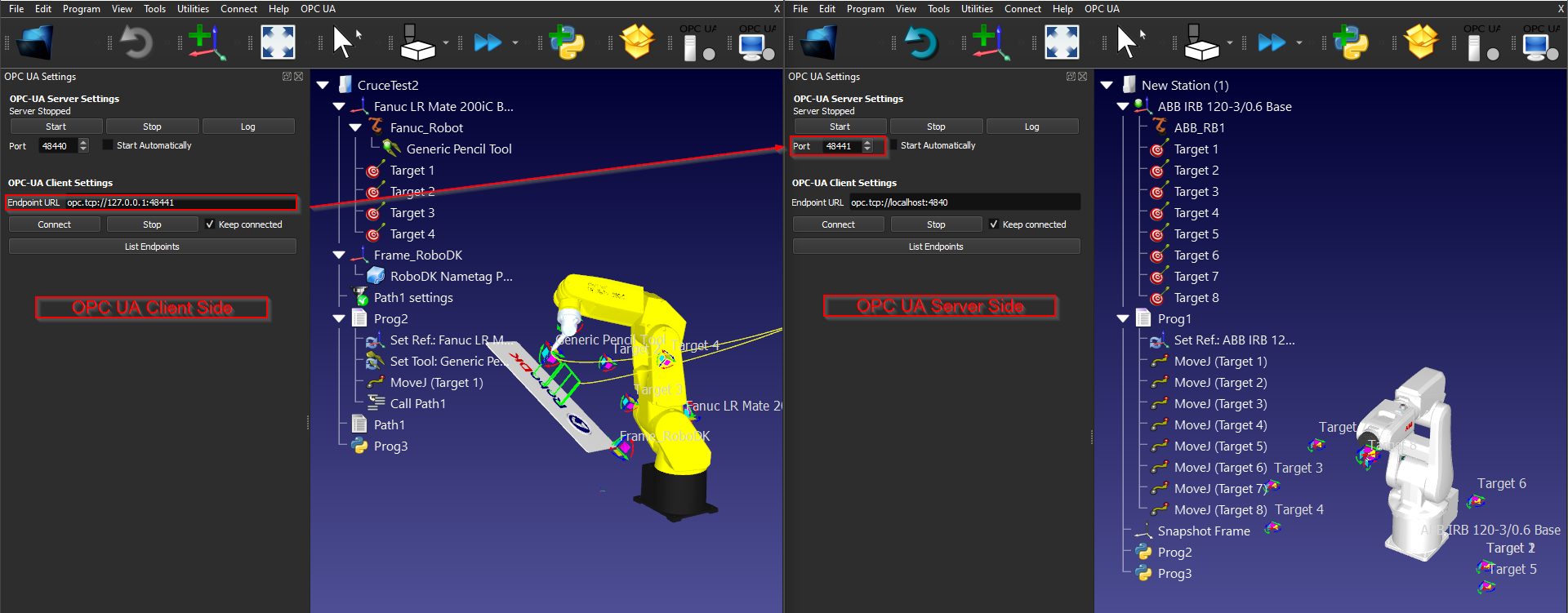
Appuyez sur "Connect" pour établir la connexion.
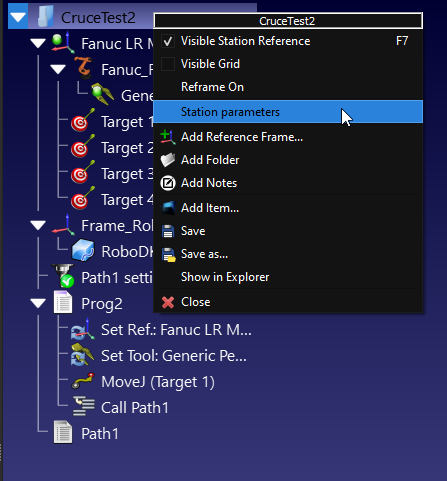
s'il y a un message avec " Variables du serveur récupérées. Cliquez avec le bouton droit de la souris sur l'élément de la station et sélectionnez 'Paramètres de la station' pour voir les variables", la connexion est établie.
Cliquez avec le bouton droit de la souris sur votre station et sélectionnez "Paramètres de la station".
Nœuds clients
Vous pouvez vérifier les détails de chaque nœud dans la section des nœuds.
Implémentation avec l'API RoboDK
Après avoir obtenu les données des nœuds à partir du serveur OPC UA via le client OPC UA dans RoboDK, vous pouvez également obtenir ces données à l'aide de RoboDK-Python-API.
Installation
Vous pouvez vous référer à ce lien pour installer l'API Python de RoboDK.
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
Vous pouvez également installer manuellement le paquetage RoboDK pour Python :
pip install robodk
Script
Cet exemple de script montre comment obtenir les paramètres de la station via l'API Python de RoboDK.
from robodk import robolink # RoboDK API
RDK = robolink.Robolink()
from robodk import * # RoboDK API
from robolink import * # Boîte à outils du robot
itemlist = RDK.ItemList()
if itemlist :
# Obtenir tous les paramètres de la station
print('Vaild Paramaters are configured in your Station..')
StationParameters=RDK.getParams()
pour StationParameter dans StationParameters :
print("Station Parameters %s : %s"%(StationParameter[0],str((StationParameter[1]))))
autre :
print('Pas de liste de paramètres..')
Voici le résultat de l'exemple de script :
Les différents paramètres sont configurés dans votre station...
Paramètres de la station RoboDK : RoboDK 64 bit v5.5.3.23031
Heure des paramètres de la station : 02/14/2023 03:58:29.191.000.000
Paramètres de la station Vitesse de simulation : 13.8551
Paramètres de la station Station : MyTestStation