Mise en œuvre avec UaExpert
Vous pouvez utiliser le logiciel UaExpert pour tester la connectivité avec le serveur OPC UA de RoboDK.
Vous pouvez télécharger la version gratuite du logiciel UaExpert sur le site web d'Unified Automation : https://www.unified-automation.com/downloads/opc-ua-clients.html.
Add-in du serveur UaExpert
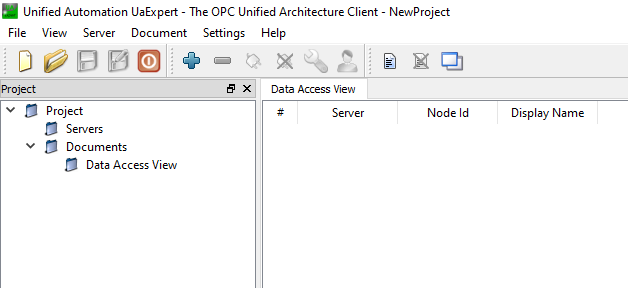
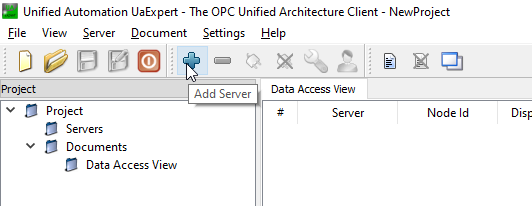
Lancez UaExpert et cliquez sur le bouton "+" pour ajouter le serveur OPC UA de RoboDK.
Développez la découverte personnalisée et sélectionnez l'option <Double clics pour ajouter un serveur.> pour ajouter le serveur OPC UA de RoboDK.
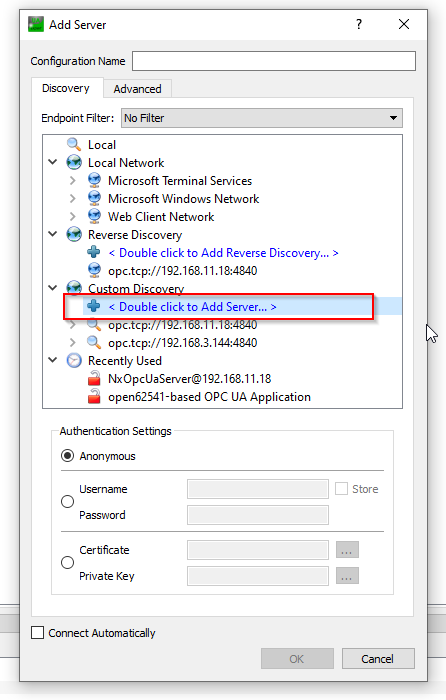
Saisissez l'URL du serveur OPC UA, opc.tcp://127.0.0.1:48440 que vous avez configuré à l'étape précédente.
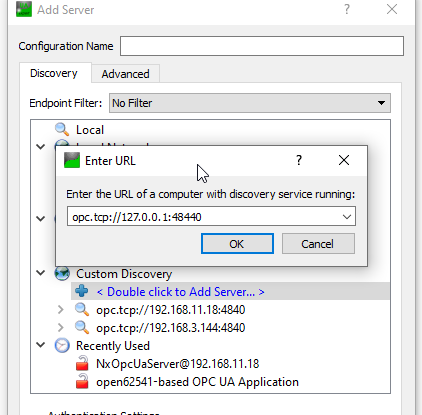
Connectez le serveur OPC UA avec la sécurité "None".
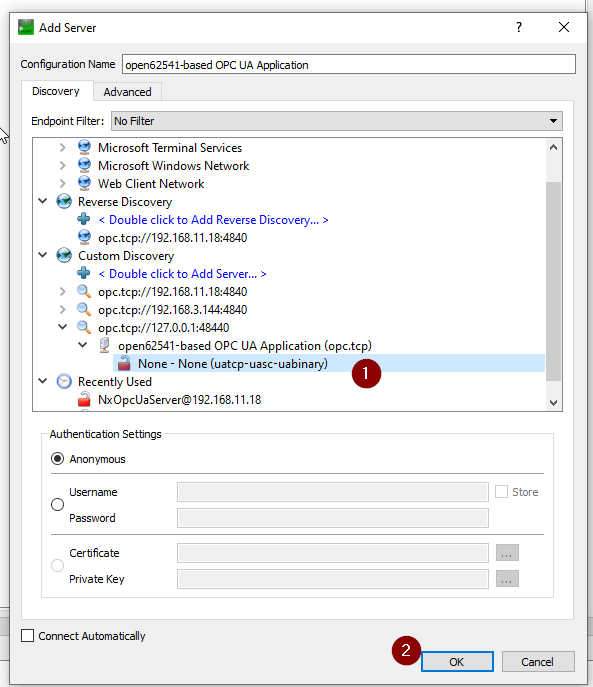
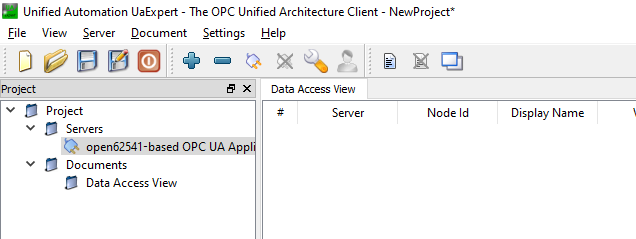
Le serveur est configuré.
Connectez-vous au serveur
Vous pouvez maintenant vous connecter au serveur OPC UA de RoboDK à partir de UaExpert.
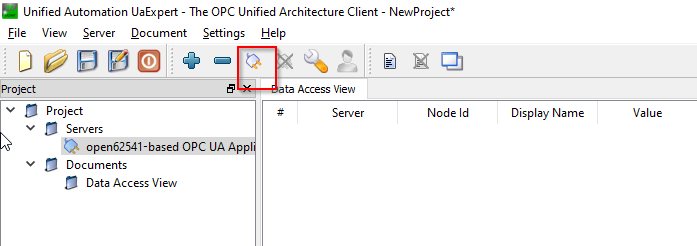
Vous pouvez voir les nœuds et les méthodes lorsque la connexion est établie.

Nœuds de serveur
Le serveur OPC UA de RoboDK comporte quelques nœuds qui vous permettent d'échanger des informations de base sur votre station.
RoboDK
Le nœud RoboDK est un nœud qui fournit la version actuelle de votre logiciel RoboDK.

La version RoboDK 64 Bit v5.5.3.23031 a été utilisée dans cet exemple.

Vitesse de simulation
Vitesse de simulation est un nœud qui indique la vitesse de simulation actuelle et permet à l'utilisateur d'écraser la vitesse de simulation actuelle.
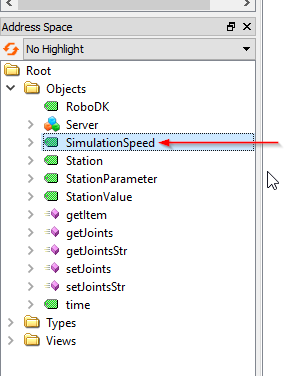
La valeur du nœud est référencée à la barre de glissement de la vitesse de simulation.
La simulation en cours peut être lue à partir de ce nœud et peut écraser la vitesse de simulation.

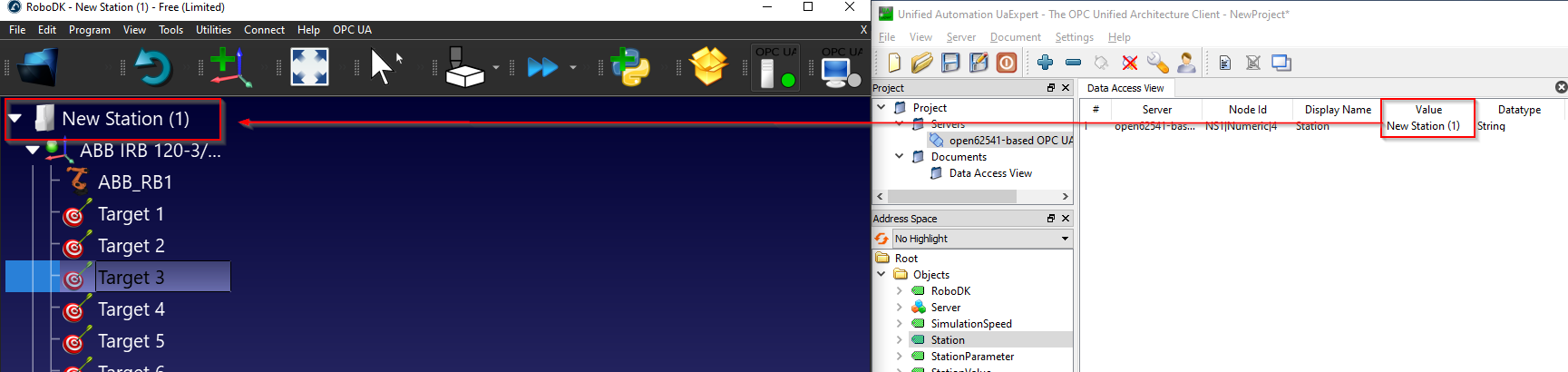
Station
Le nœud de station est un nœud qui permet à l'utilisateur d'obtenir le nom actuel de la station dans RoboDK.
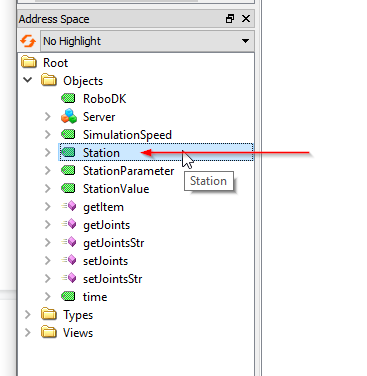
Comme vous le voyez ci-dessous, le nœud Station est référencé à votre "Nom de la station" dans RoboDK.
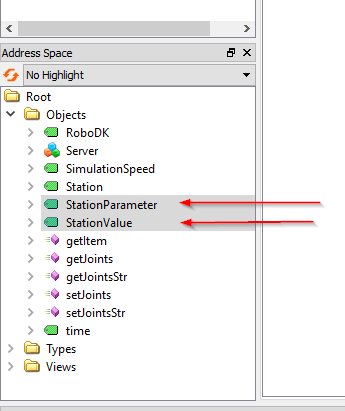
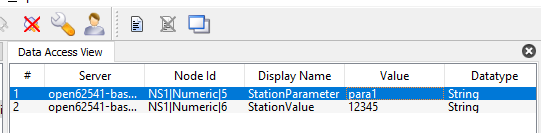
Paramètres de la station/Valeur de la station
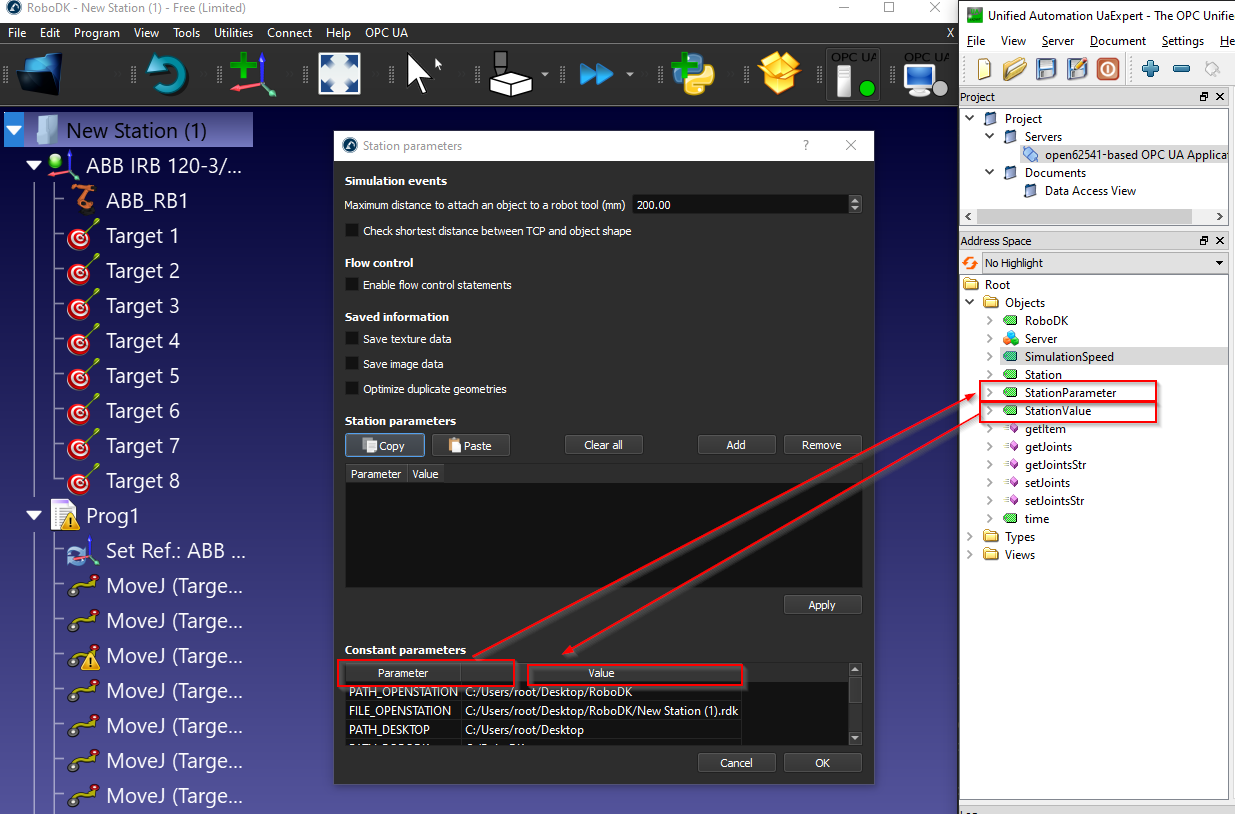
Les paramètres et la valeur de la station sont une paire de nœuds qui permet à l'utilisateur d'obtenir ou de définir n'importe quel paramètre à l'intérieur de votre station. Le serveur OPC UA de RoboDK surveille en permanence la valeur réelle du "StationParameter" et renvoie la valeur de ce "StationParameter" à partir du nœud de valeur de la station.
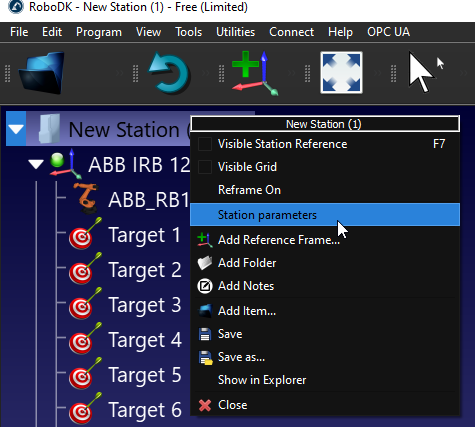
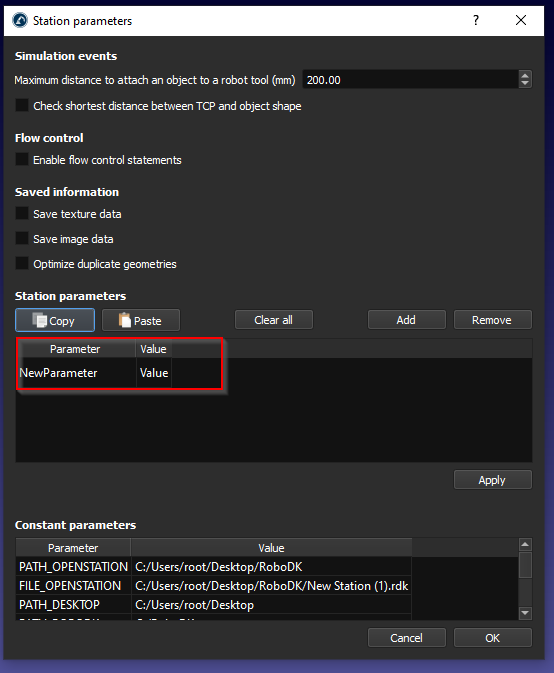
Vous pouvez afficher les paramètres de votre station en cliquant avec le bouton droit de la souris sur votre station RoboDK>Paramètres de la station.
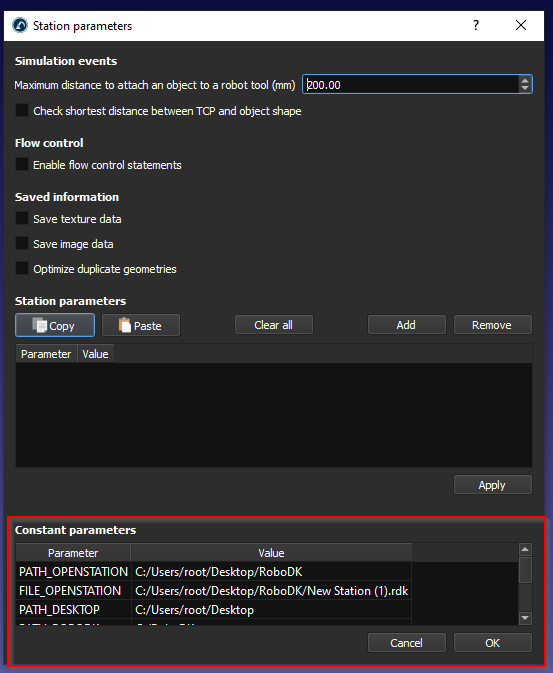
Dans le champ Paramètres constants, vous pouvez voir les paramètres par défaut de la station et leur valeur.
Le paramètre de la station est référencé dans le champ "Paramètre" et la valeur de la station est référencée dans le champ "Valeur".
Nous pouvons créer nos propres paramètres en cliquant sur le bouton "Add-in".
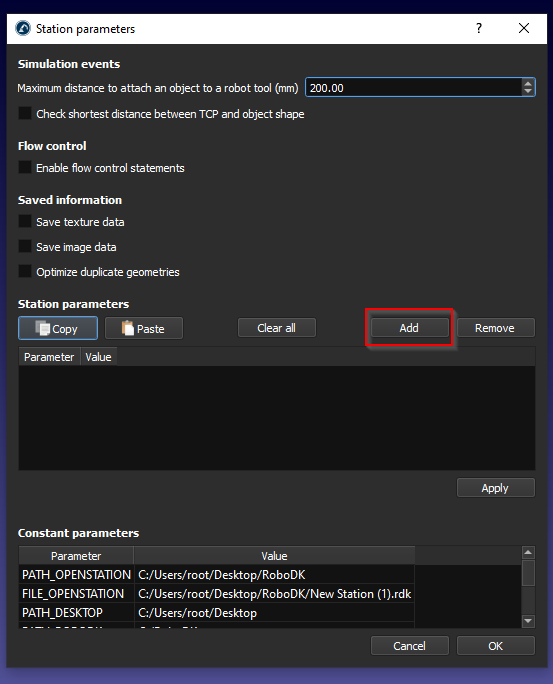
Un nouveau paramètre Station est ajouté.
Saisissez le nom et la valeur de votre paramètre, puis appuyez sur Appliquer pour l'enregistrer.
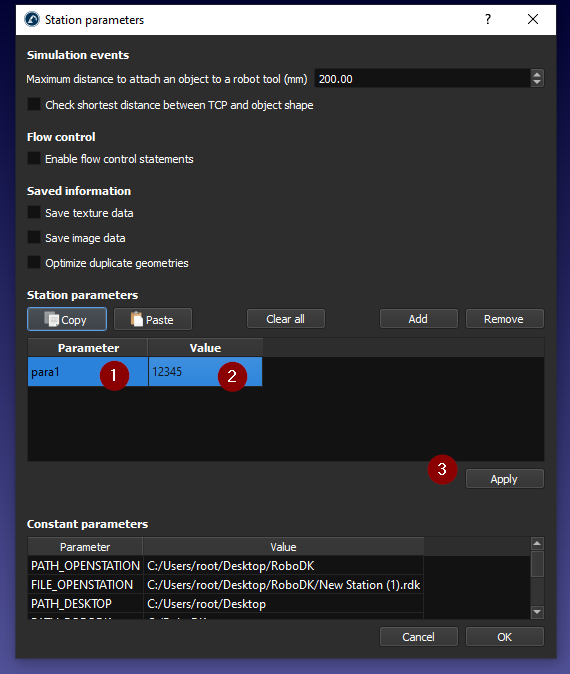
Vous pouvez également obtenir votre propre paramètre de station.
Temps
Le nœud time est un nœud qui vous permet d'obtenir l'heure actuelle de la station RoboDK.
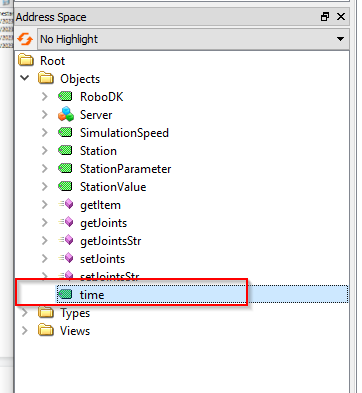
Une valeur au format DataTime est renvoyée.

Et ce nœud est mis à jour en permanence.

Méthodes
Le serveur OPC UA de RoboDK est également fourni avec quelques méthodes permettant à l'utilisateur d'accéder dynamiquement aux données de la station RoboDK.
Il suffit de cliquer avec le bouton droit de la souris sur Method>Call pour exécuter la méthode.
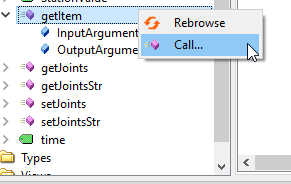
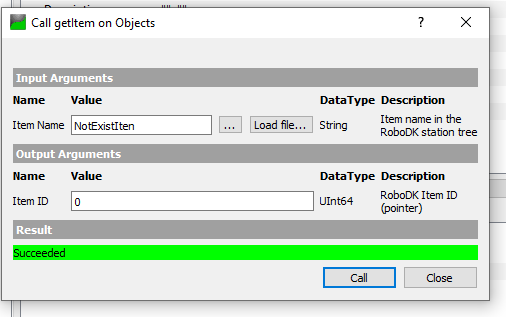
getItem
getItem est une méthode qui permet à l'utilisateur d'obtenir le pointeur de votre élément.
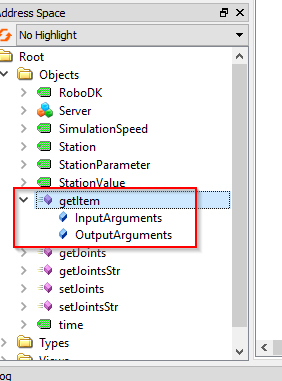
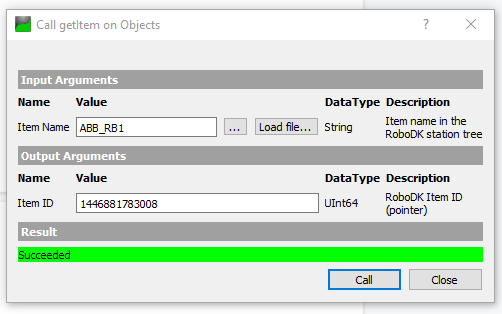
Pour les InputArguments, le Device Name est requis, vous pouvez imaginer que le Device Name est le nom de votre station, de votre robot, etc. L'ID de l'élément est l'argument de sortie qui renvoie le pointeur de l'appareil.
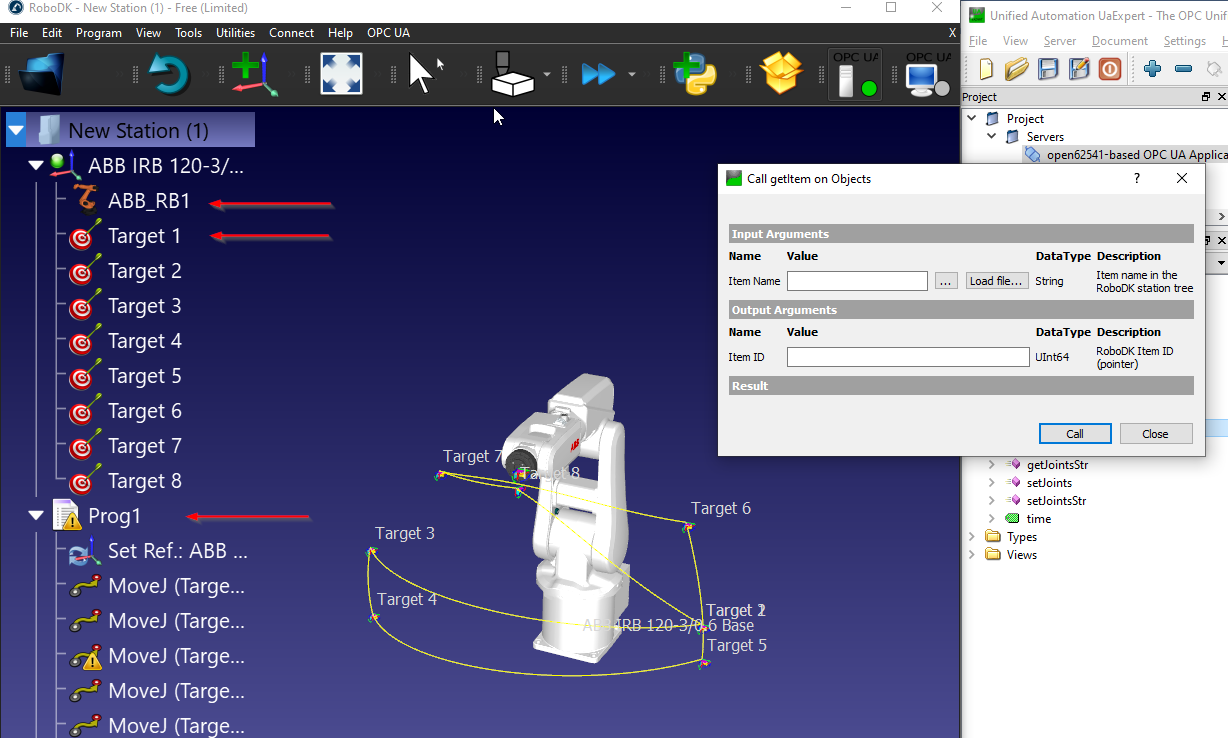
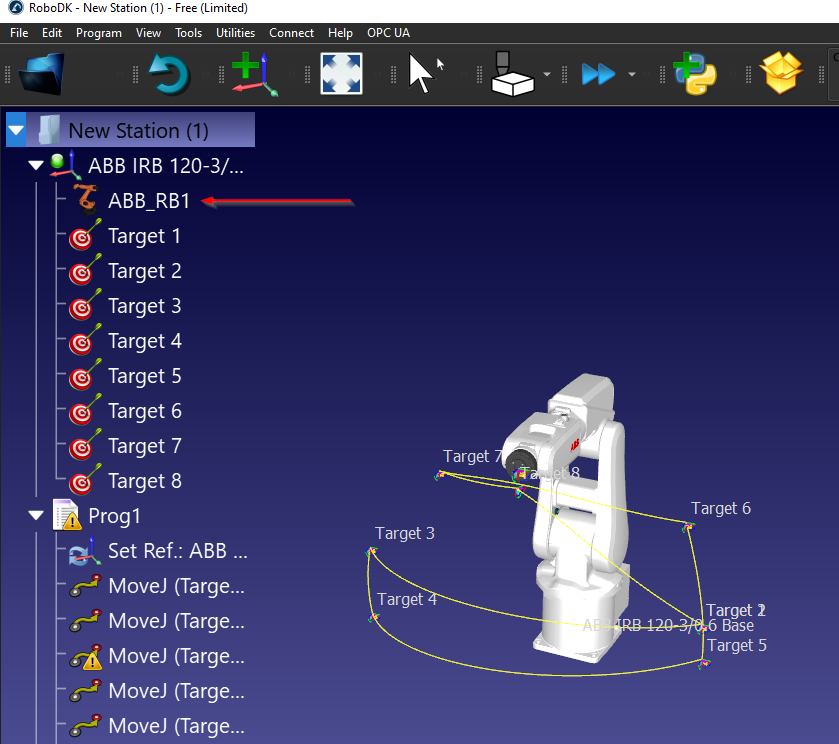
Dans cet exemple, j'ai reçu l'ID d'élément (pointeur) de mon robot ABB nommé "ABB_RB1".
0 est renvoyé si le nom de l'élément n'est pas valide ou n'existe pas dans votre station.
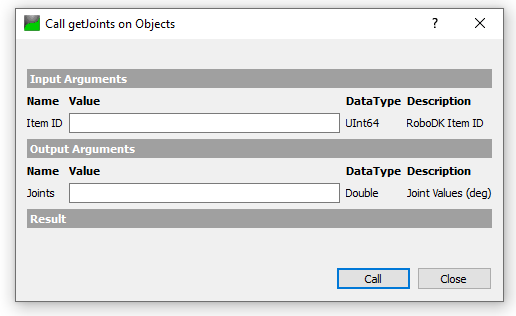
getJoints
getJonits est une méthode qui permet à l'utilisateur d'obtenir la valeur de l'articulation du robot à partir de la station, sur la base de l'ID de l'élément.
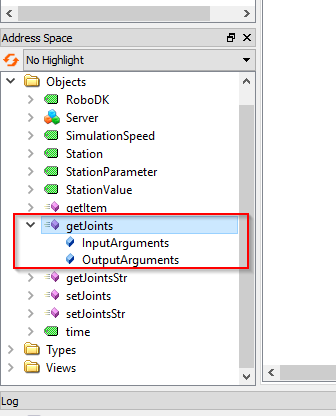
L'ID de l'élément est la valeur du pointeur de votre élément, et vous pouvez l'obtenir à l'aide de la méthode getItem().
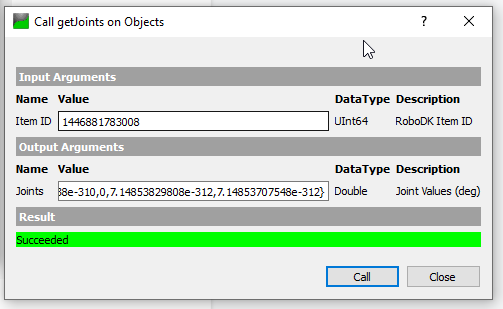
Nous obtiendrons l'ID de l'élément avec le nom de l'élément "ABB_RB1", et une valeur UInt64 sera renvoyée.
La valeur des joints est renvoyée lorsque vous passez l'ID de l'élément dans la méthode que nous avons obtenue dans la section précédente.
getJointsStr
getJointsStr est une méthode qui permet à l'utilisateur d'obtenir la valeur des joints à partir d'une chaîne de caractères.
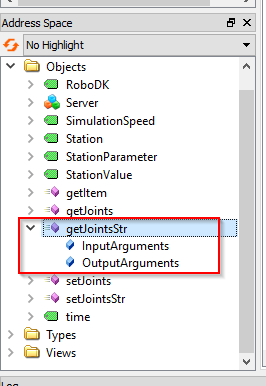
Nous pouvons transmettre le nom du robot (chaîne) dans cette méthode.
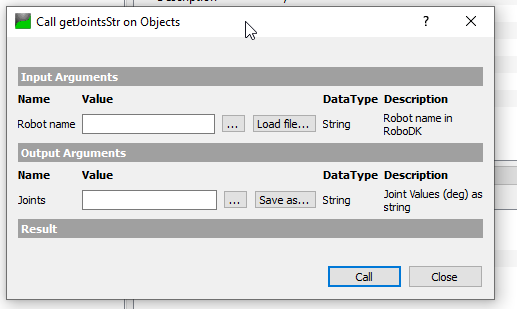
Dans Ma station, ABB_RB1 est le nom de mon robot.
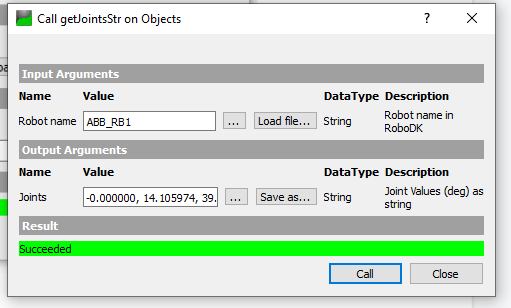
Il suffit de passer "ABB_RB1" dans le paramètre Nom du robot et d'appeler la méthode - La valeur de l'articulation est renvoyée au format chaîne.
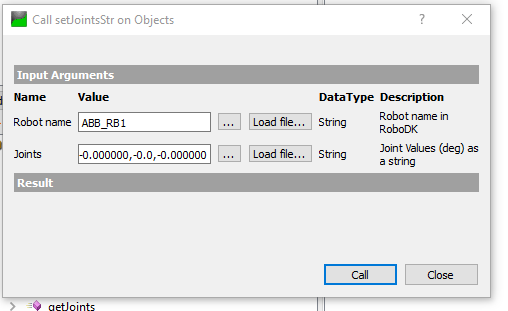
setJointsStr
setJointsStr est une méthode qui permet à l'utilisateur de définir la valeur des articulations du robot, sur la base d'une chaîne de caractères.
Dans le nom du robot, ABB_RB1 est transmis, et nous pouvons simplement transmettre une chaîne avec la valeur de l'articulation dans le paramètre Joints.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000