Méthodes
Le serveur OPC UA de RoboDK est également fourni avec quelques méthodes permettant à l'utilisateur d'accéder dynamiquement aux données de la station RoboDK.
Il suffit de cliquer avec le bouton droit de la souris sur Method>Call pour exécuter la méthode.
getItem
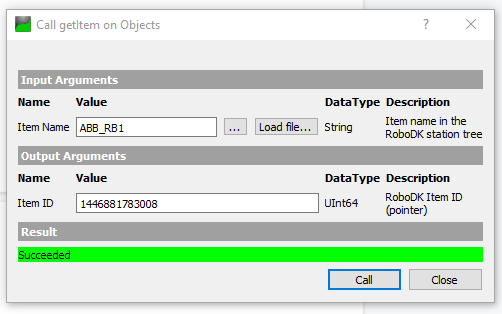
getItem est une méthode qui permet à l'utilisateur d'obtenir le pointeur de votre élément.
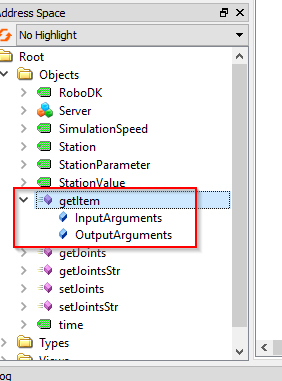
Pour les InputArguments, le Device Name est requis, vous pouvez imaginer que le Device Name est le nom de votre station, de votre robot, etc. L'ID de l'élément est l'argument de sortie qui renvoie le pointeur de l'appareil.
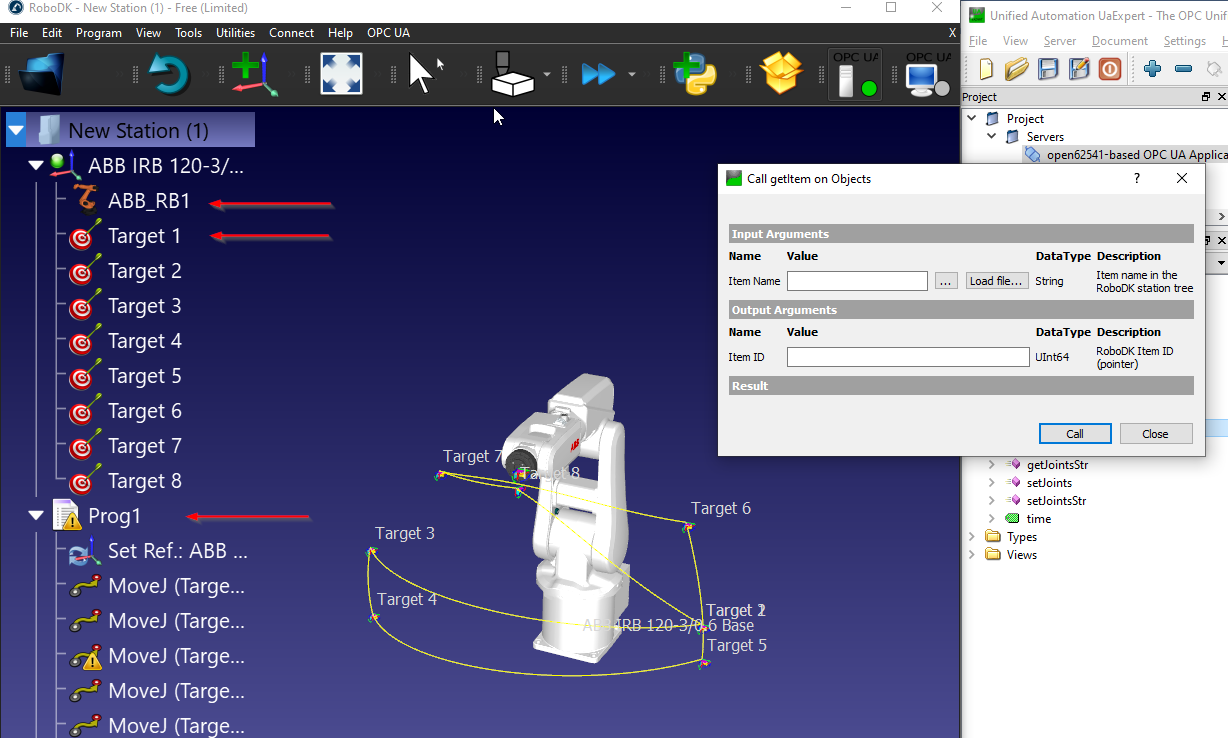
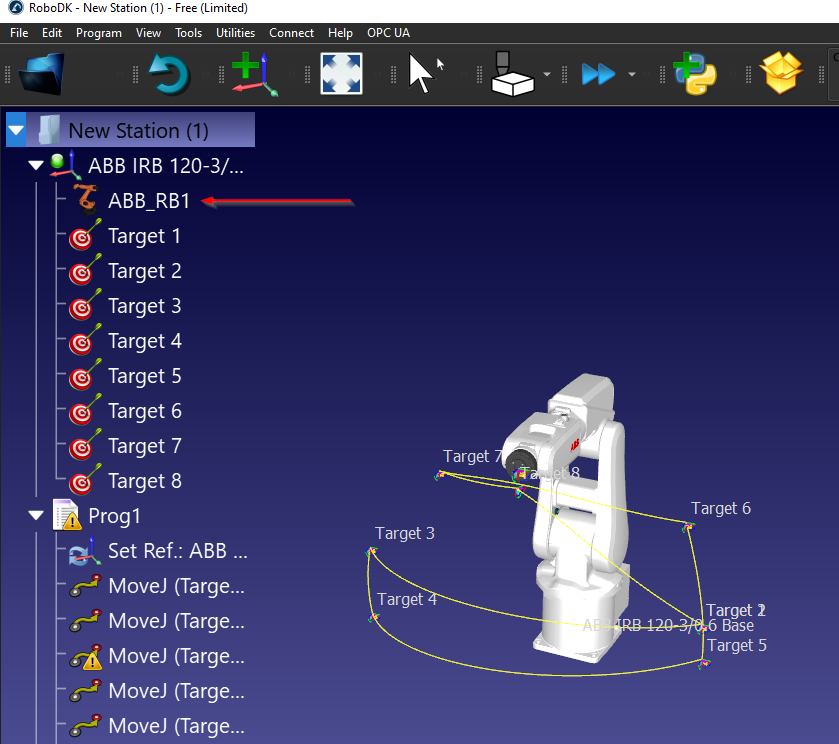
Dans cet exemple, j'ai reçu l'ID d'élément (pointeur) de mon robot ABB nommé "ABB_RB1".
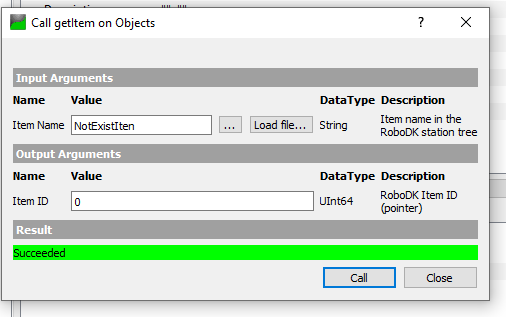
0 est renvoyé si le nom de l'élément n'est pas valide ou n'existe pas dans votre station.
getJoints
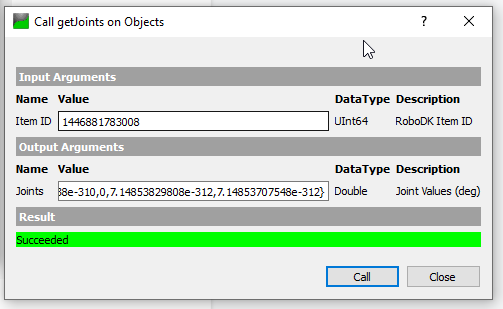
getJonits est une méthode qui permet à l'utilisateur d'obtenir la valeur de l'articulation du robot à partir de la station, sur la base de l'ID de l'élément.
L'ID de l'élément est la valeur du pointeur de votre élément, et vous pouvez l'obtenir à l'aide de la méthode getItem().
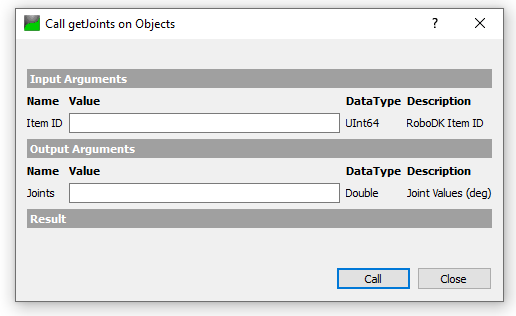
Nous obtiendrons l'ID de l'élément avec le nom de l'élément "ABB_RB1", et une valeur UInt64 sera renvoyée.
La valeur des joints est renvoyée lorsque vous passez l'ID de l'élément dans la méthode que nous avons obtenue dans la section précédente.
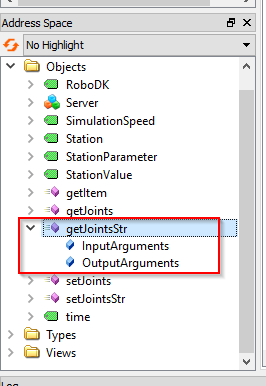
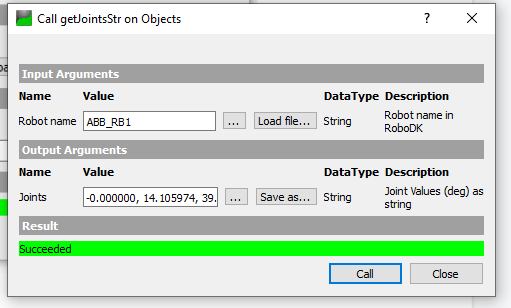
getJointsStr
getJointsStr est une méthode qui permet à l'utilisateur d'obtenir la valeur des joints à partir d'une chaîne de caractères.
Nous pouvons transmettre le nom du robot (chaîne) dans cette méthode.
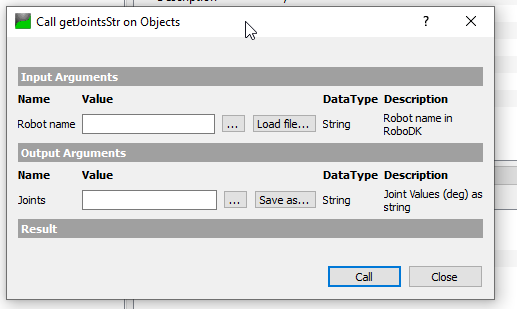
Dans Ma station, ABB_RB1 est le nom de mon robot.
Il suffit de passer "ABB_RB1" dans le paramètre Nom du robot et d'appeler la méthode - La valeur de l'articulation est renvoyée au format chaîne.
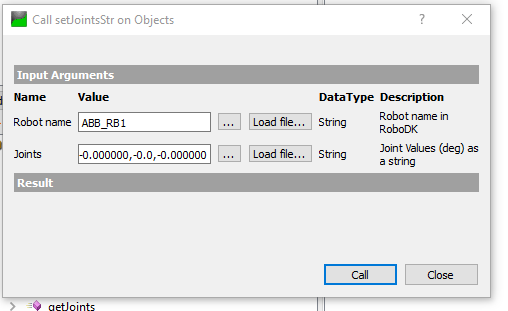
setJointsStr
setJointsStr est une méthode qui permet à l'utilisateur de définir la valeur des articulations du robot, sur la base d'une chaîne de caractères.
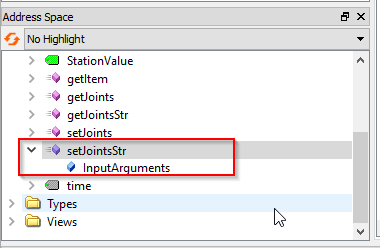
Dans le nom du robot, ABB_RB1 est transmis, et nous pouvons simplement transmettre une chaîne avec la valeur de l'articulation dans le paramètre Joints.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000