Nœuds de serveur
Le serveur OPC UA de RoboDK comporte quelques nœuds qui vous permettent d'échanger des informations de base sur votre station.
RoboDK
Le nœud RoboDK est un nœud qui fournit la version actuelle de votre logiciel RoboDK.

La version RoboDK 64 Bit v5.5.3.23031 a été utilisée dans cet exemple.

Vitesse de simulation
Vitesse de simulation est un nœud qui indique la vitesse de simulation actuelle et permet à l'utilisateur d'écraser la vitesse de simulation actuelle.
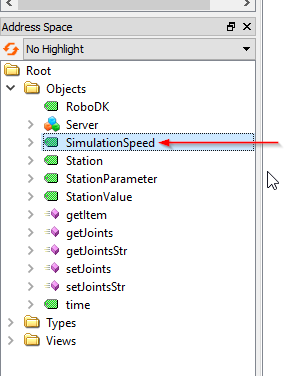
La valeur du nœud est référencée à la barre de glissement de la vitesse de simulation.
La simulation en cours peut être lue à partir de ce nœud et peut écraser la vitesse de simulation.

Station
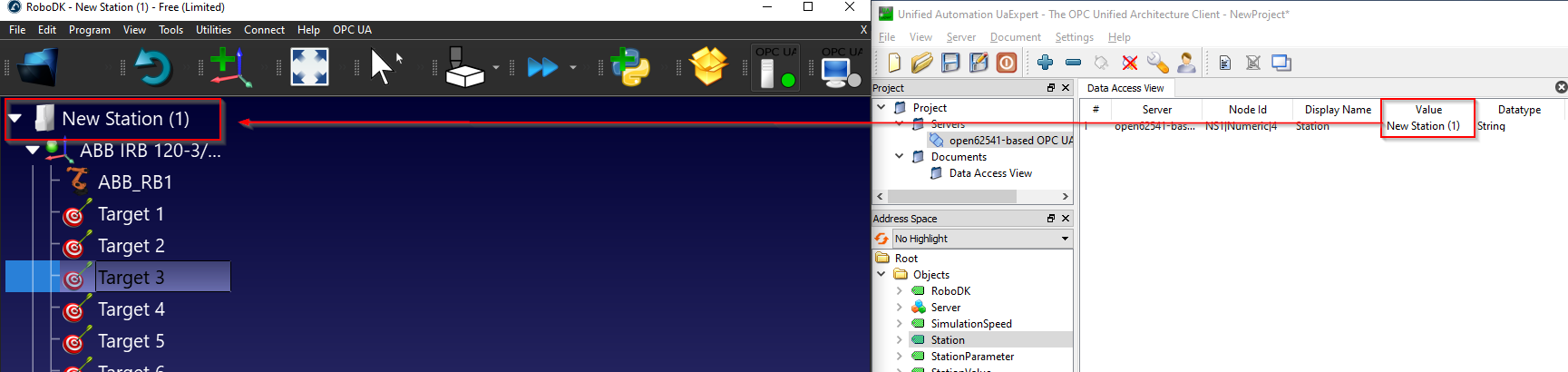
Le nœud de station est un nœud qui permet à l'utilisateur d'obtenir le nom actuel de la station dans RoboDK.
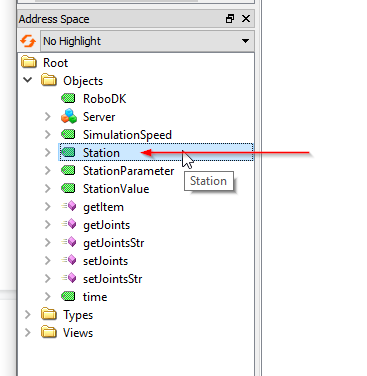
Comme vous le voyez ci-dessous, le nœud Station est référencé à votre "Nom de la station" dans RoboDK.
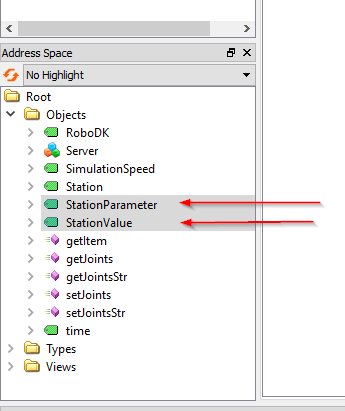
Paramètres de la station/Valeur de la station
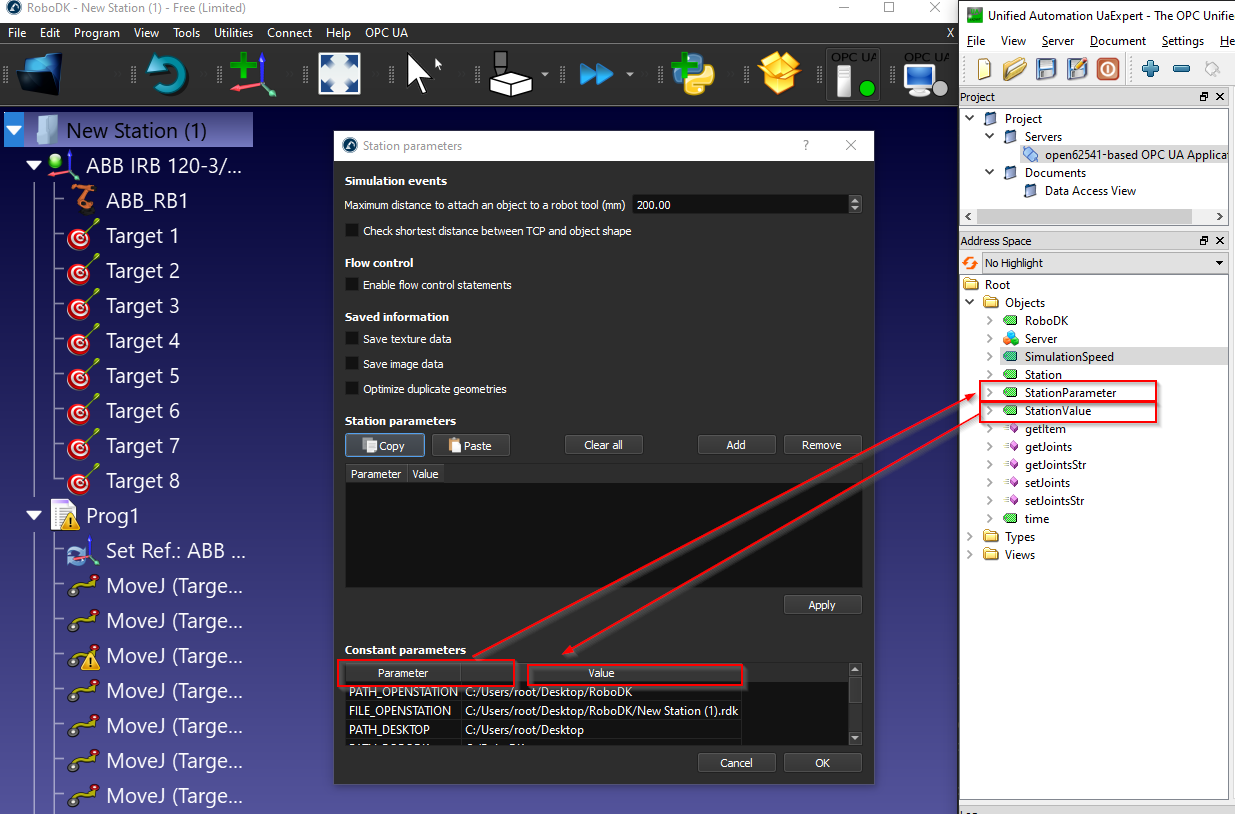
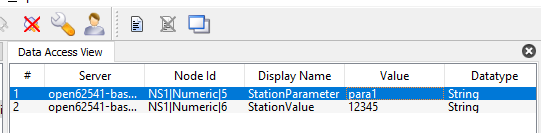
Les paramètres et la valeur de la station sont une paire de nœuds qui permet à l'utilisateur d'obtenir ou de définir n'importe quel paramètre à l'intérieur de votre station. Le serveur OPC UA de RoboDK surveille en permanence la valeur réelle du "StationParameter" et renvoie la valeur de ce "StationParameter" à partir du nœud de valeur de la station.
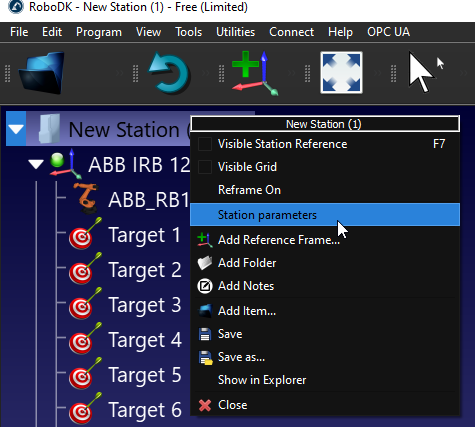
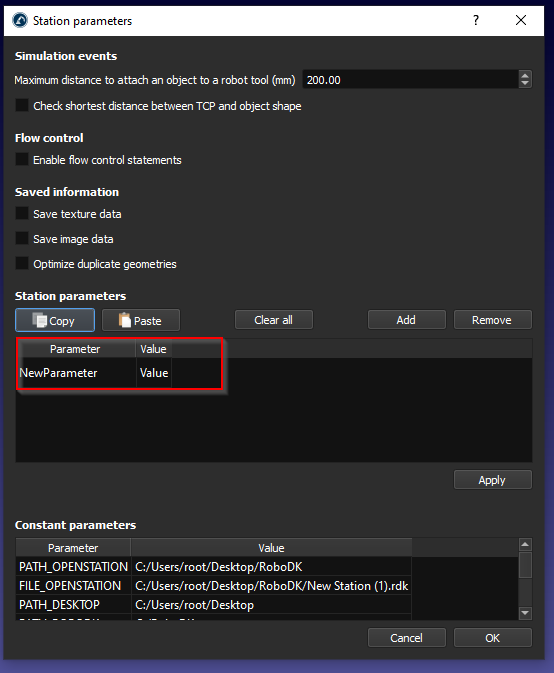
Vous pouvez afficher les paramètres de votre station en cliquant avec le bouton droit de la souris sur votre station RoboDK>Paramètres de la station.
Dans le champ Paramètres constants, vous pouvez voir les paramètres par défaut de la station et leur valeur.
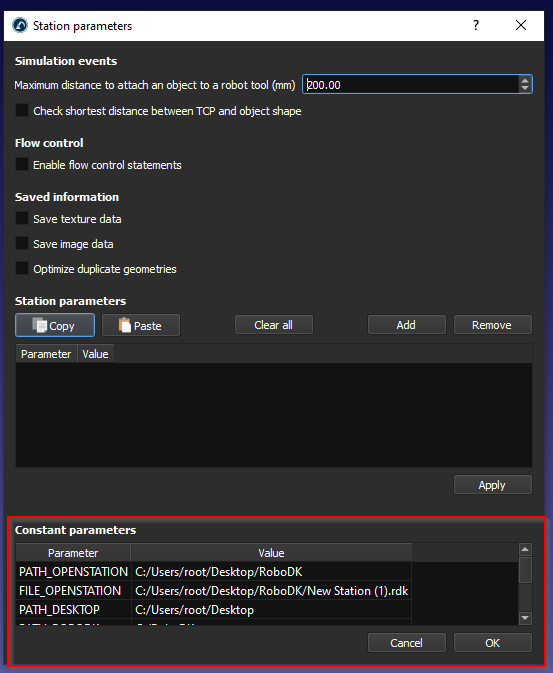
Le paramètre de la station est référencé dans le champ "Paramètre" et la valeur de la station est référencée dans le champ "Valeur".
Nous pouvons créer nos propres paramètres en cliquant sur le bouton "Add-in".
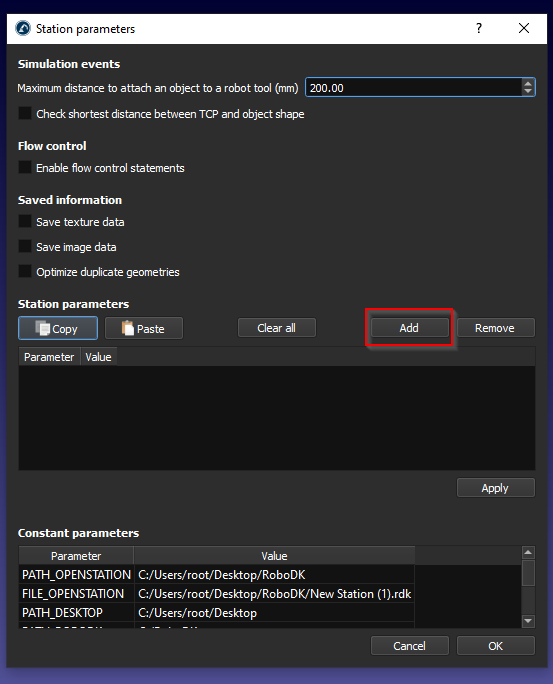
Un nouveau paramètre Station est ajouté.
Saisissez le nom et la valeur de votre paramètre, puis appuyez sur Appliquer pour l'enregistrer.
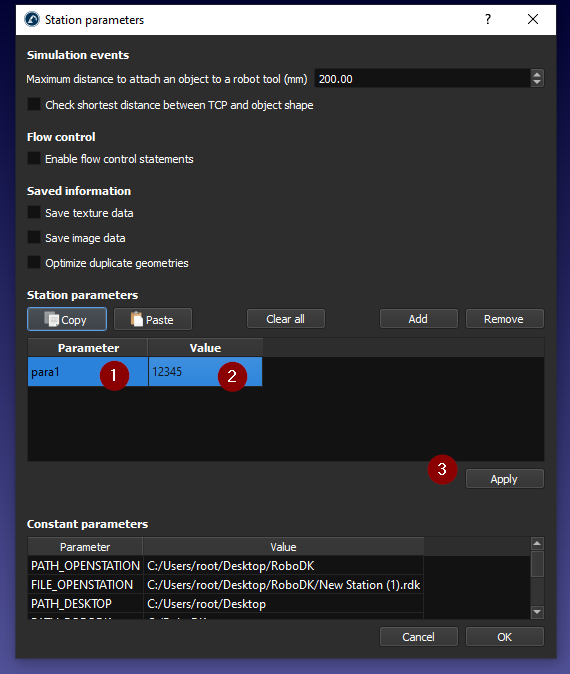
Vous pouvez également obtenir votre propre paramètre de station.
Temps
Le nœud time est un nœud qui vous permet d'obtenir l'heure actuelle de la station RoboDK.
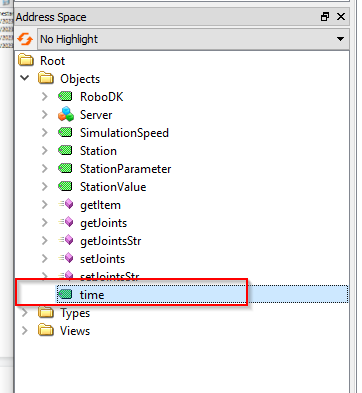
Une valeur au format DataTime est renvoyée.

Et ce nœud est mis à jour en permanence.
