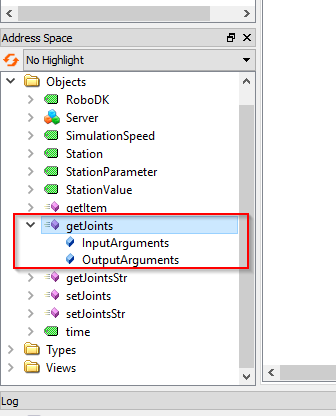
getJoints
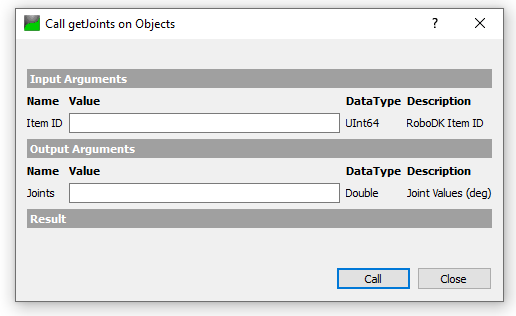
getJonits est une méthode qui permet à l'utilisateur d'obtenir la valeur de l'articulation du robot à partir de la station, sur la base de l'ID de l'élément.
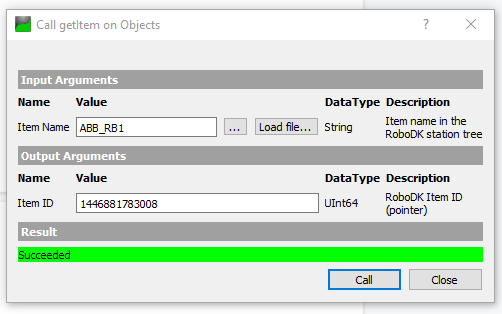
L'ID de l'élément est la valeur du pointeur de votre élément, et vous pouvez l'obtenir à l'aide de la méthode getItem().
Nous obtiendrons l'ID de l'élément avec le nom de l'élément "ABB_RB1", et une valeur UInt64 sera renvoyée.
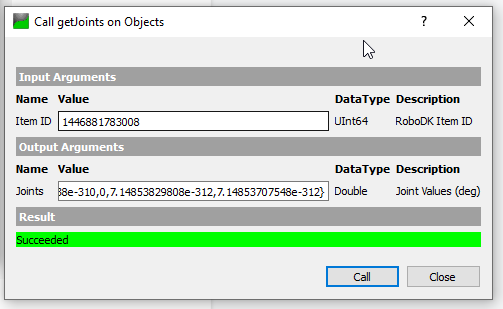
La valeur des joints est renvoyée lorsque vous passez l'ID de l'élément dans la méthode que nous avons obtenue dans la section précédente.