setJointsStr
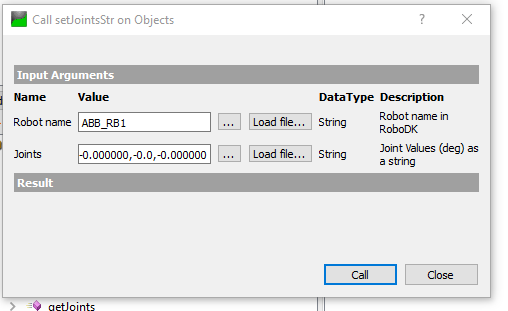
setJointsStr est une méthode qui permet à l'utilisateur de définir la valeur des articulations du robot, sur la base d'une chaîne de caractères.
Dans le nom du robot, ABB_RB1 est transmis, et nous pouvons simplement transmettre une chaîne avec la valeur de l'articulation dans le paramètre Joints.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000