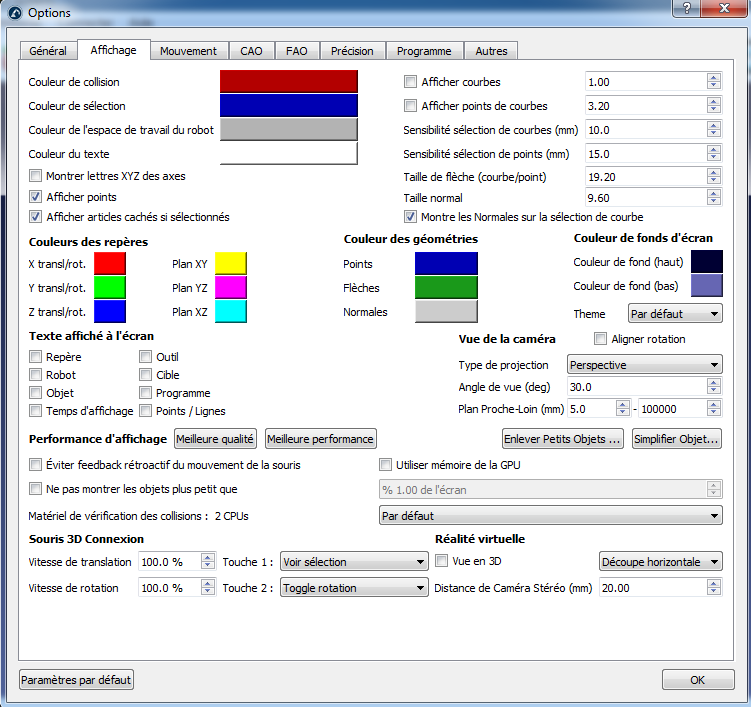
Onglet Affichage
Sélectionner les couleurs désirées qui seront utilisées dans l’écran principal, en cliquant sur les rectangles de couleurs pour les paramètres suivants : collision, sélection, espace de travail du robot, texte, points.
Sélectionner Montrer lettres XYZ des axes pour afficher les repères de références avec les lettres X, Y, Z. Par défaut, ils ne sont pas affichés et les couleurs standards Rouge (X), Vert (Y), Bleu (Z) sont utilisées.
Augmenter la Sensibilité sélection des courbes/points pour faciliter la sélection des courbes et des points respectivement. Si les courbes ou les points sont trop proches les uns des autres et qu’il n’est pas facile de les sélectionner, il est préférable de réduire ces valeurs.
La taille de flèche (courbe/point) correspond à la taille des flèches vertes affichées dans les projets de suivi de courbes ou de suivi de points (disponible dans le menu Utilitaires).
Les couleurs du repère/plans de référence peuvent être modifiées manuellement ainsi que les couleurs de fond pour le dégradé (les couleurs du plan sont affichées lors du déplacement des repères de référence avec la souris).
La Vue de la caméra est réglée sur Perspective par défaut. Il est possible de le changer en projection orthographique et de mettre à jour certains paramètres de la caméra tels que l’angle de vue et les plans proche/éloigné.
Décocher Aligner Rotation pour tourner librement dans n’importe quelle direction.
Par défaut, les paramètres d’affichage sont réglés pour obtenir les meilleurs résultats avec la meilleure qualité. Modifier la performance d’affichage à Meilleure performance si RoboDK ralentit parce qu’il y a trop d’objets affichés. Cela forcera à utiliser la mémoire de la GPU et n’affichera pas de petits objets à l’écran.
Il est possible d’utiliser une souris Connexion 3D, comme le Spacenavigator, et de modifier les vitesses de translation et de rotation par défaut en utilisant cette souris spécifique.
Il est également possible d’afficher RoboDK sur un écran 3D (utiliser la vue 3D pour la réalité virtuelle). La distance de la Caméra Stéréo définira la perception de proximité ou d’éloignement des objets.