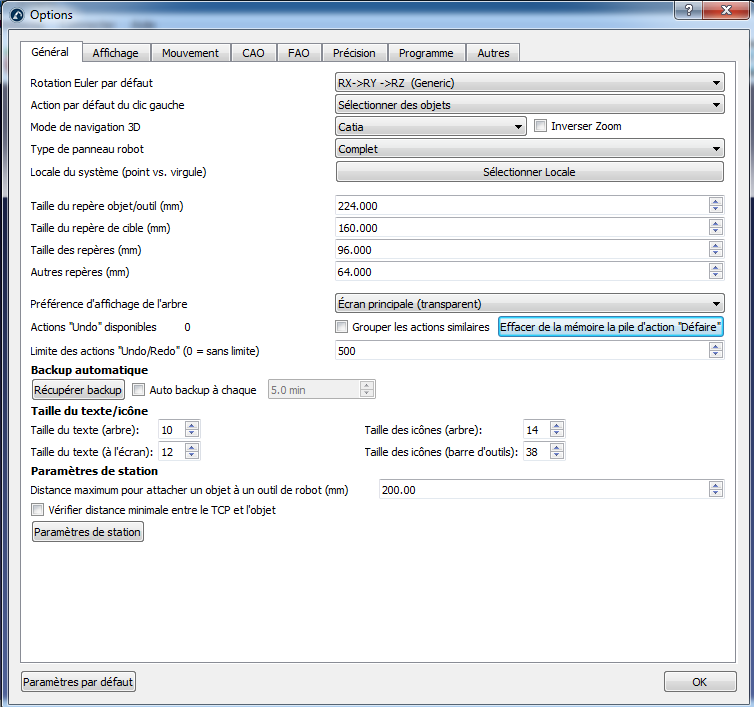
Onglet General
Le mode Rotation Euler par défaut permet de sélectionner l’ordre dans lequel les rotations du repère sont effectuées par défaut.Un repère générique de référence contient des renseignements sur la position et l’orientation. Les repères de référence sont établis et ils peuvent être représentés en utilisant la position XYZ et des rotations autour de X, Y et Z. L’ordre de rotation est très important. RoboDK présélectionnera le bon format/ordre en fonction du robot utilisé. Voir la section des repères de référence pour plus d’informations.
L’option Action par défaut du clic gauche est réglée pour sélectionner des objets par défaut. Il est possible de le changer pour d’autres paramètres de navigation 3D, par exemple, pour pivoter par défaut.
Avec le Mode de navigation 3D, il est possible de spécifier le type de navigation 3D préféré avec une souris et d’émuler des logiciels spécifiques tels que Rhinoceros, Catia, Topsolid ou Vero.
Le type de panneau/fenêtre Robot est réglé sur Complet par défaut. Ceci affiche une panneau/fenêtre robot « complet ». Régler cette option sur Normal ou Basic pour réduire le nombre d’options disponibles dans la fenêtre panneau/fenêtre du robot.
L’option Locale du système permet de définir la manière d’écrire les nombres en fonction d’une langue et d’un pays spécifique. Les chiffres s’affichent dans le bon format.
Les tailles des Objets/Cibles/Repères/Autres repères peuvent être réglés pour tous ces éléments spécifiques. Il est recommandé d’utiliser les touches + et – pour agrandir ou de réduire les tailles de ces éléments.
La Préférence d’affichage de l’arborescence s’affiche sur l’écran principal par défaut. Changer le en Fenêtre à coté pour afficher l’arborescence dans une fenêtre séparée.
Il est possible d’effacer la pile d’actions à défaire pour effacer la mémoire vive (RAM). Il est également possible de limiter les actions Annuler/Rétablir qui seront conservées en mémoire. Si RoboDK ralentit, c’est peut-être parce qu’il y a trop d’actions d’annulation stockées en mémoire. Par défaut, les actions similaires ne sont pas regroupées, par exemple, si un repère de référence est déplacé, chaque petite sous étape sera enregistrée. Vérifier Group similar actions pour modifier ce comportement.
La section Taille du texte/icône permet de modifier la taille du texte et des icônes dans l’arborescence et dans la barre d’outils.
Dans Paramètres de station, la distance maximale pour fixer un objet à un outil robot “Distance maximum pour attacher un objet à un outil de robot (mm)” est utilisée par un évènement de simulation. Les événements de simulation peuvent rattacher des objets à des outils et simuler des événements spécifiques. Ces événements n’ont aucun impact sur le code généré, ils ne sont utilisés qu’à des fins de simulation.
Les paramètres de Station sont des paramètres d’état qui sont sauvegardés dans le fichier RDK et peuvent être modifiés manuellement ou via l’API. Les paramètres de la station permettent de simuler des entrées et sorties numériques et de faire communiquer la simulation avec d’autres systèmes au moyen de l’API, tel qu’un automate (PLC).