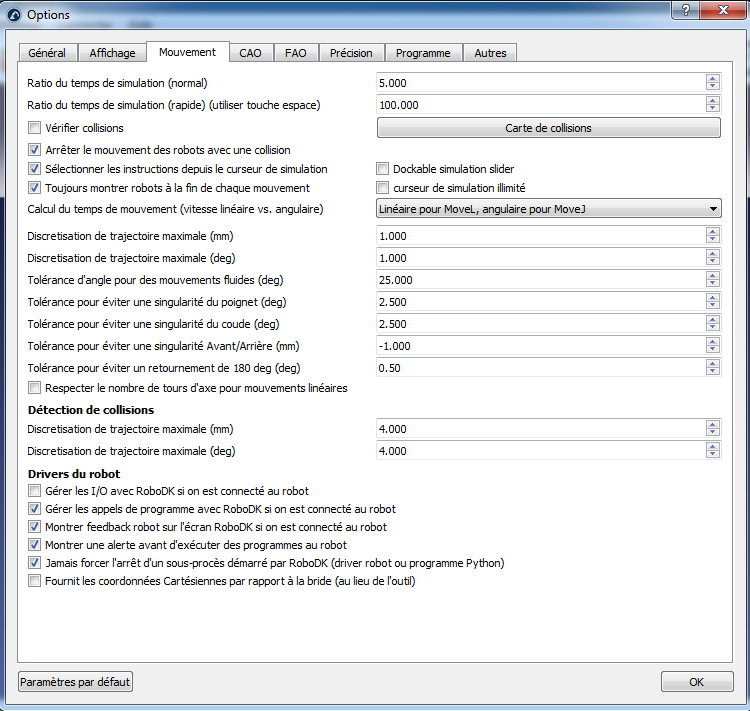
Onglet Mouvement
Le rapport de temps de simulation définit la vitesse à laquelle la simulation s’affiche par rapport au temps réel. Un taux de simulation par défaut de 5 signifie que 1 seconde passée sur le simulateur équivaut à 5 secondes en temps réel sur le robot. De plus amples renseignements sont disponibles dans la section Ratio de simulation.



Le calcul du temps de mouvement règle comment RoboDK calcule le temps de cycle et comment les robots utilisent les vitesses/accélérations linéaires/angulaires pour la simulation et le temps de cycle. De plus amples renseignements sont disponibles dans la section Cycle Time.
Si le rapport de simulation est trop rapide, l’ordinateur pourrait ne pas être en mesure d’afficher le robot à la fin de chaque parcours afin de maintenir une simulation rapide. Pour éviter cet effet, cocher Toujours montrer robots à la fin de chaque mouvement.
La discrétisation de trajectoire maximale (mm/deg) définit la façon dont RoboDK « discrétise ou décompose » les mouvements respectivement linéaires et articulaires, à des fins de simulation.
Les angles de tolérances pour éviter les singularités des articulations sont utilisés pour des robots 6 axes. Si une singularité est détectée, le programme du robot doit être modifié pour s’assurer que le programme fonctionne correctement sur le contrôleur réel. (Baie du robot)
La section Drivers du Robot permet de spécifier le comportement des pilotes des robots. Les pilotes des robots permettent de lié un « vrai » robot avec RoboDK.
Gérer les entrées/sorties (I/O) avec Robodk lorsqu’il est connecté à un robot simulera les entrées et sorties en tant que paramètres de la station RoboDK au lieu de modifier l’état des entrées/sorties sur le robot.
L’option Montrer feedback robot sur l’écran RoboDK si on est connecté au robot affichera le mouvement du robot en temps réel à mesure que le robot se déplace.
Montrer une alerte avant d’exécuter des programmes au robot affiche une fenêtre popup avant que le programme ne s’exécute à partir du PC (en utilisant l’option Démarrer sur le robot).
Décocher Jamais forcer l’arrêt d’un sous-procès démarré par RoboDK si vous rencontrez des problèmes avec les pilotes de robots. Cela permettra de s’assurer qu’aucun autre processus ne se déroule en arrière-plan lorsqu’une nouvelle connexion est établie.