Préparer votre station
Pour créer un projet de palettisation, vous devez d'abord configurer correctement votre station dans RoboDK.
Suivez les étapes suivantes pour configurer correctement votre station :
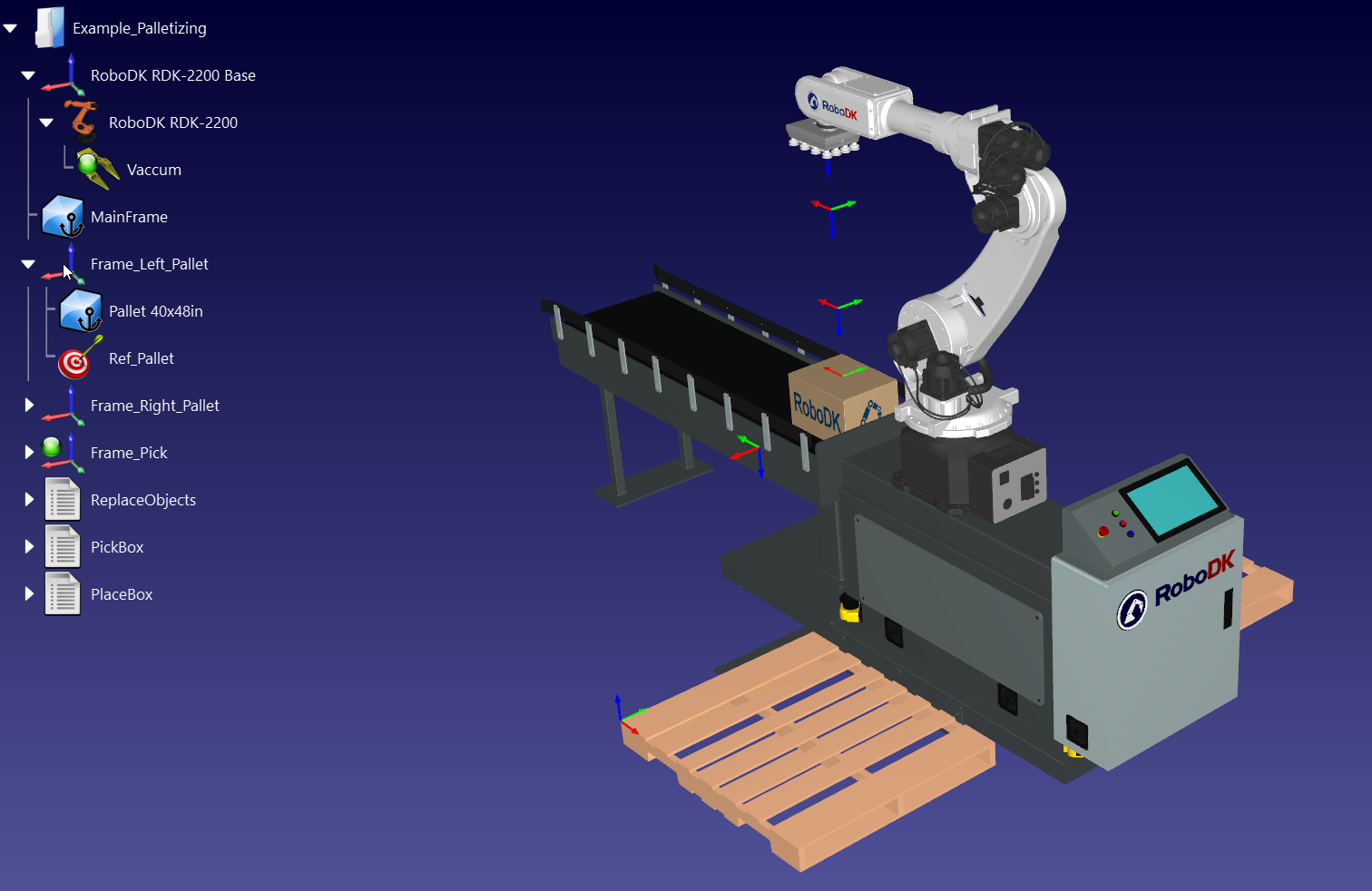
1.Vous devez charger un robot, un outil, une boîte, un système de coordonnées où vous allez apprendre à vos cibles à prendre la boîte (ex. : Frame_Pick), une palette, et un système de coordonnées sur le coin de votre palette (ex. : Frame_Pallet). Vous pouvez également charger un convoyeur si vous en avez un.
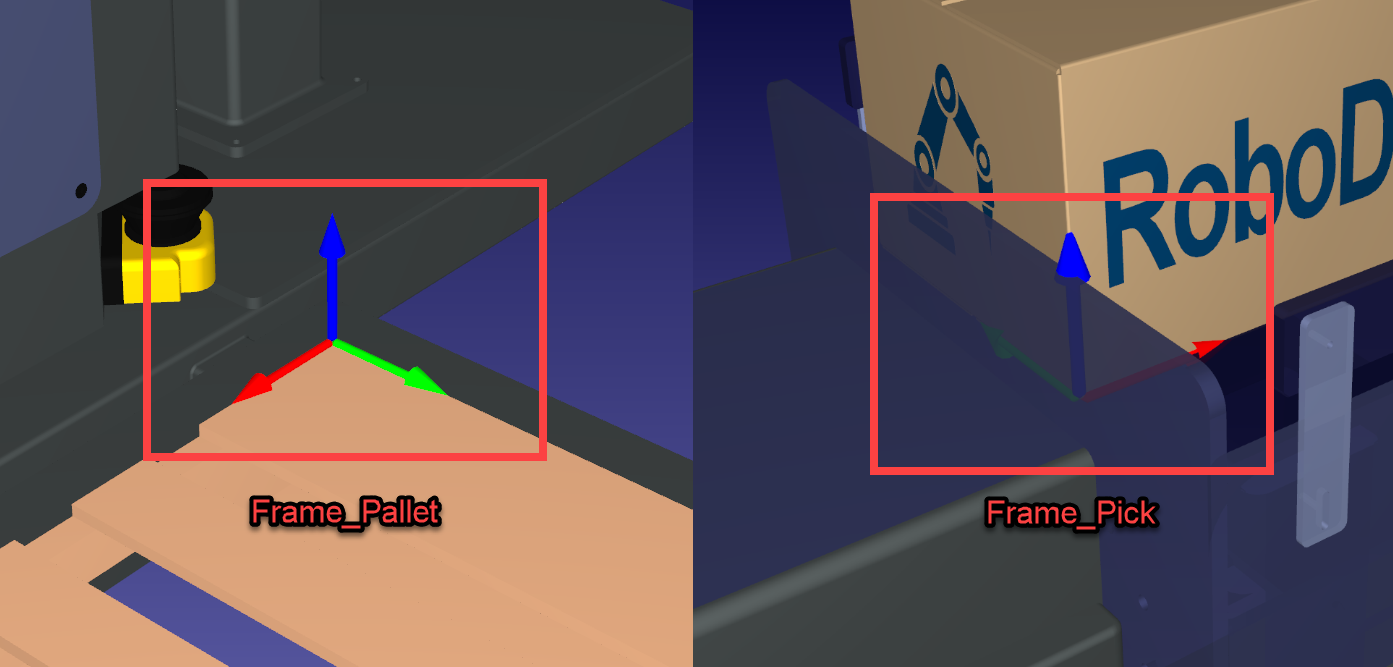
2.Les systèmes de coordonnées des palettes doivent être orientés avec leur axe X+ dans le sens de la longueur de la palette.
3.Les systèmes de coordonnées des palettes doivent être orientés avec leur axe Z+ normal à la palette (vers le haut).
4.Veillez à associer la palette et la boîte à leurs systèmes de coordonnées respectifs. Ainsi, si vous devez les déplacer, les cibles du robot mettront automatiquement à jour leur position en temps réel.
5.Repositionnez les différents objets/système de coordonnéess si nécessaire.
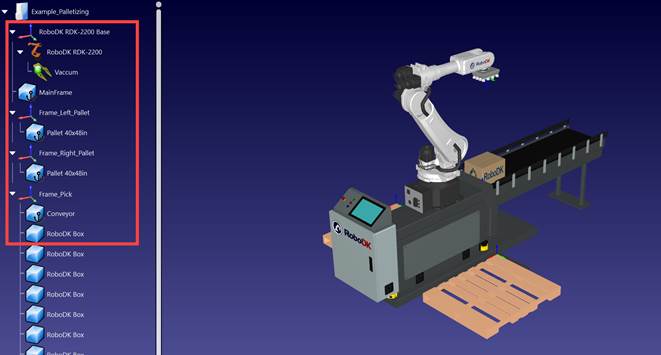
6.Clonez la boîte plusieurs fois en la copiant et en collant dans le "Frame_Pick" afin de pouvoir effectuer des prélèvements multiples.
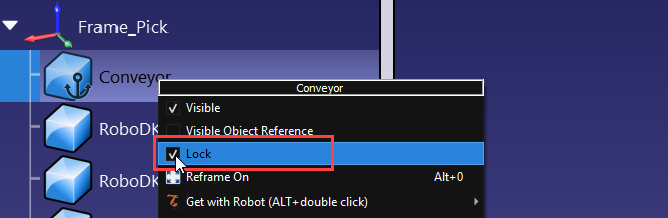
7.Veillez à verrouiller vos objets 3D, mais pas les boîtes, dans leur système de coordonnées en cliquant avec le bouton droit de la souris puis en cliquant sur "Verrouiller".
Créer un service de ramassage et de dépôt
L'assistant de palettisation vous demande de fournir un sous-programme pour choisir une nouvelle boîte et un sous-programme pour placer la boîte. Le programme "PlaceBox" sert uniquement à détacher la boîte du préhenseur et à la transférer sur le système de coordonnées de votre palette ; les cibles de placement proprement dites seront créées automatiquement par l'Add-in de palettisation par la suite.
Suivez les étapes suivantes pour créer un programme de prélèvement "PickBox" et un programme de dépôt "PlaceBox" :
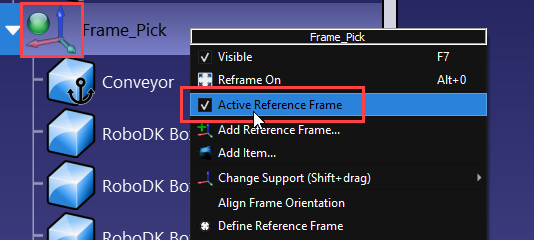
1.Tout d'abord, assurez-vous d'activer le "Frame_Pick" et d'avoir votre outil actif avant de créer de nouvelles cibles. Elles devraient être entourées d'un cercle vert si elles sont actives.
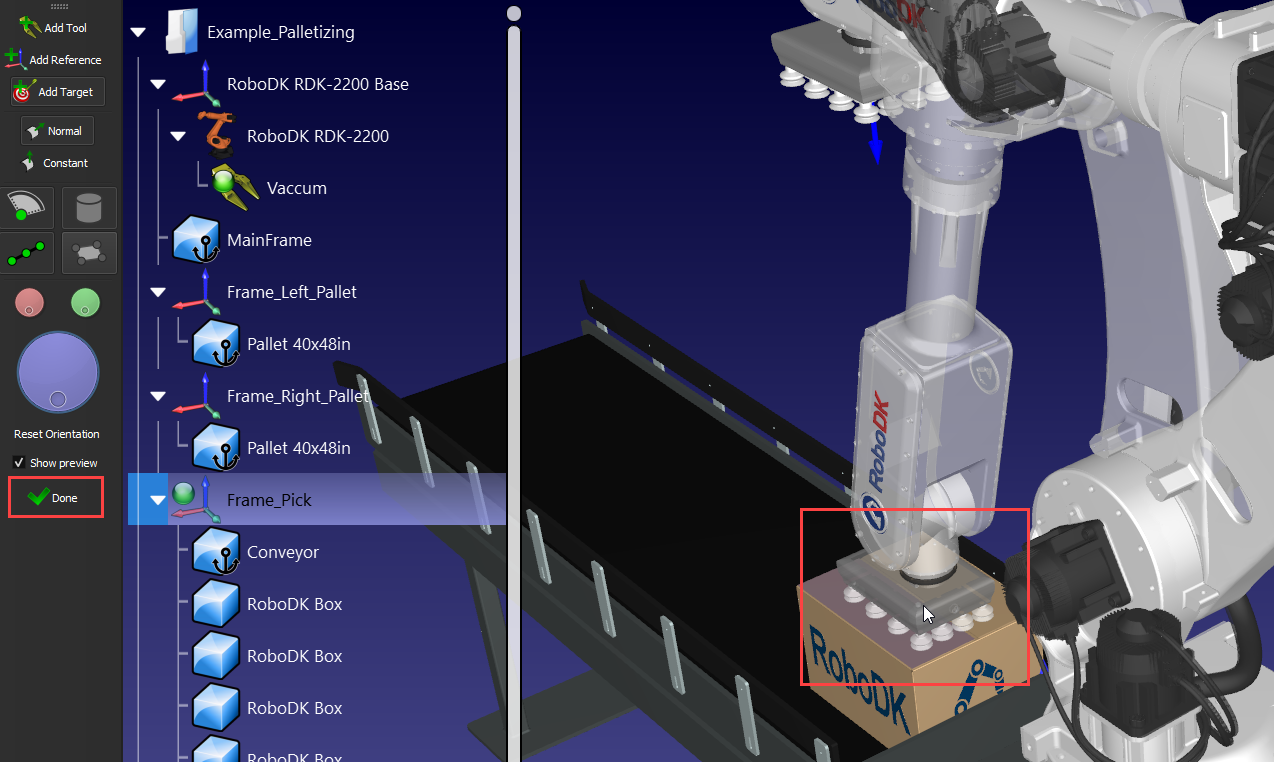
2.Dans l'onglet "Programme", sélectionnez "Enseigner la/les cible(s) sur la surface". Cliquez sur le haut de la boîte et cliquez ensuite sur "Terminé".
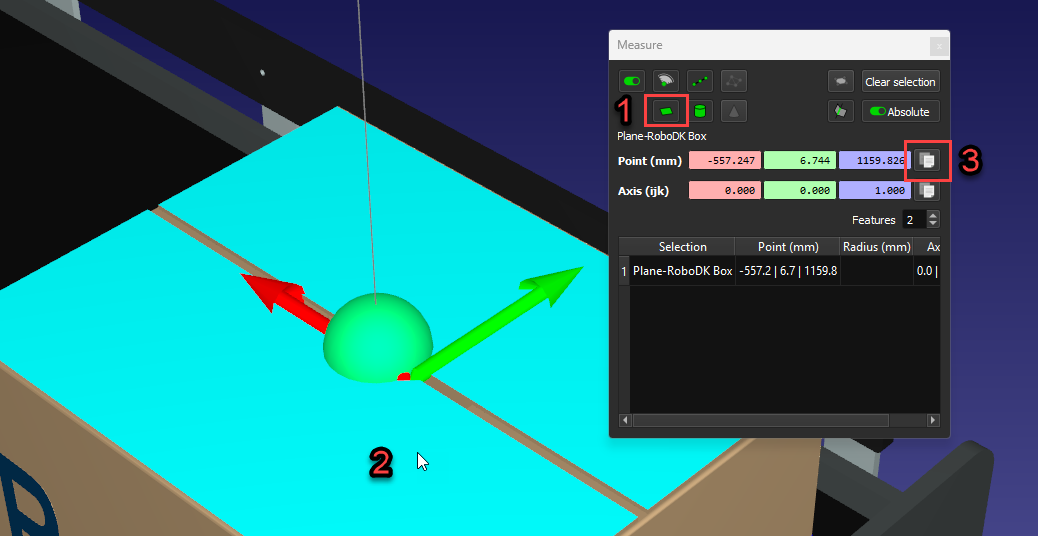
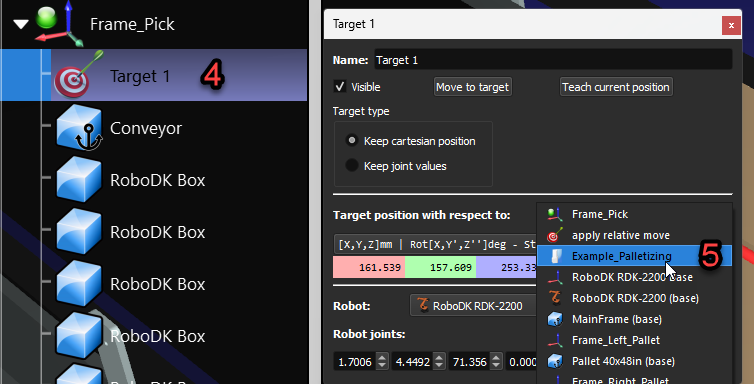
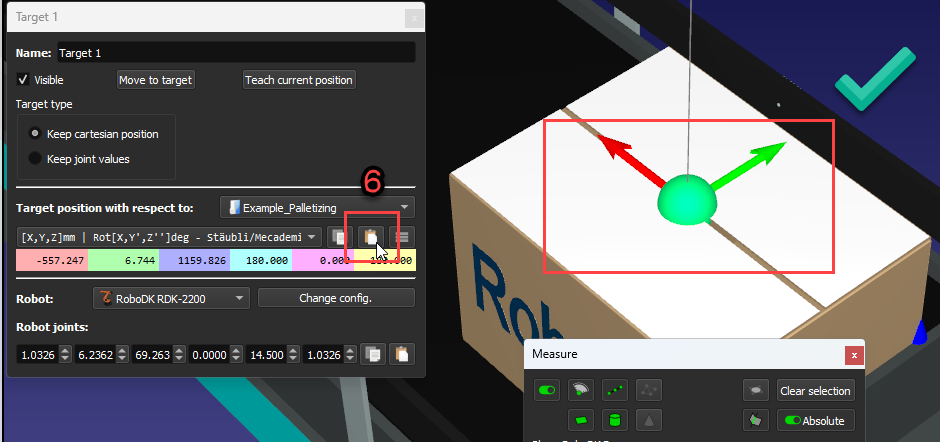
3.Vous devriez maintenant avoir votre première cible au bas du "Frame_Pick". Pour vous assurer qu'elle est centrée sur le haut de la boîte, maintenez SHIFT+M pour ouvrir l'outil de mesure, puis cliquez sur le haut de la boîte et copiez les valeurs. Cliquez ensuite sur votre cible et appuyez sur F3 pour modifier les paramètres de la cible. Choisissez l'origine de la station comme référence et collez les valeurs. La cible doit maintenant se trouver au centre de la boîte.
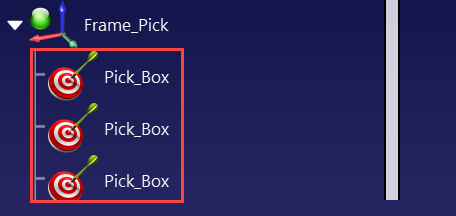
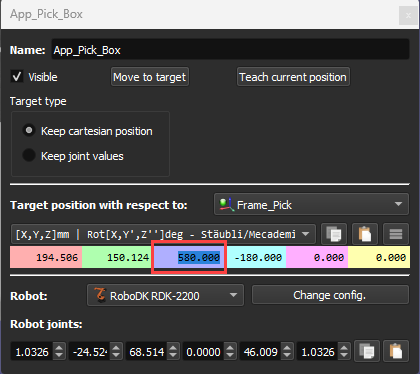
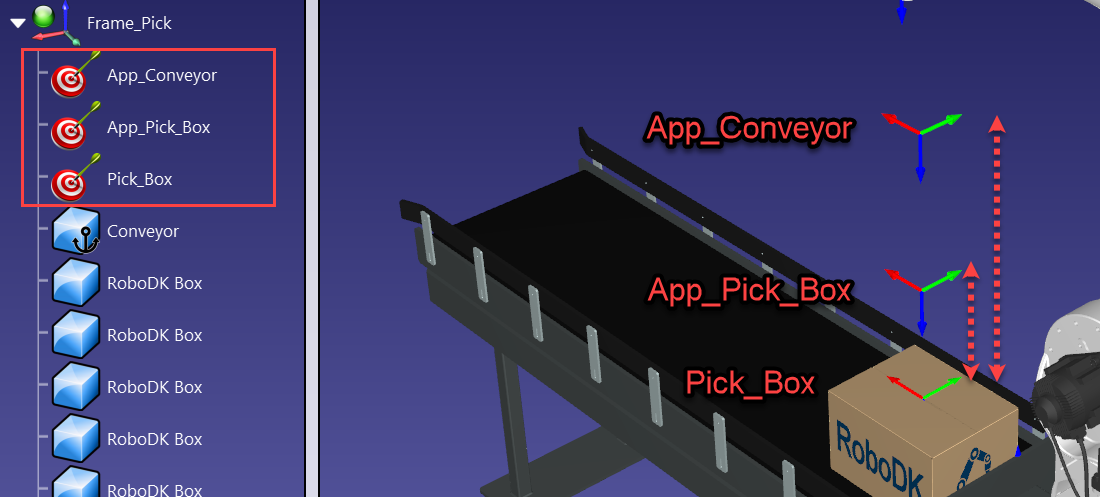
4.Renommez votre cible "Pick_Box" puis copiez/collez-la deux fois dans le "Frame_Pick". Renommez-les "App_Pick_Box" et "App_Conveyor". Ensuite, éditez les paramètres de la cible et ajoutez de la distance sur les valeurs Z à l'aide de votre molette de défilement jusqu'à ce que vous soyez satisfait des positions de la cible.
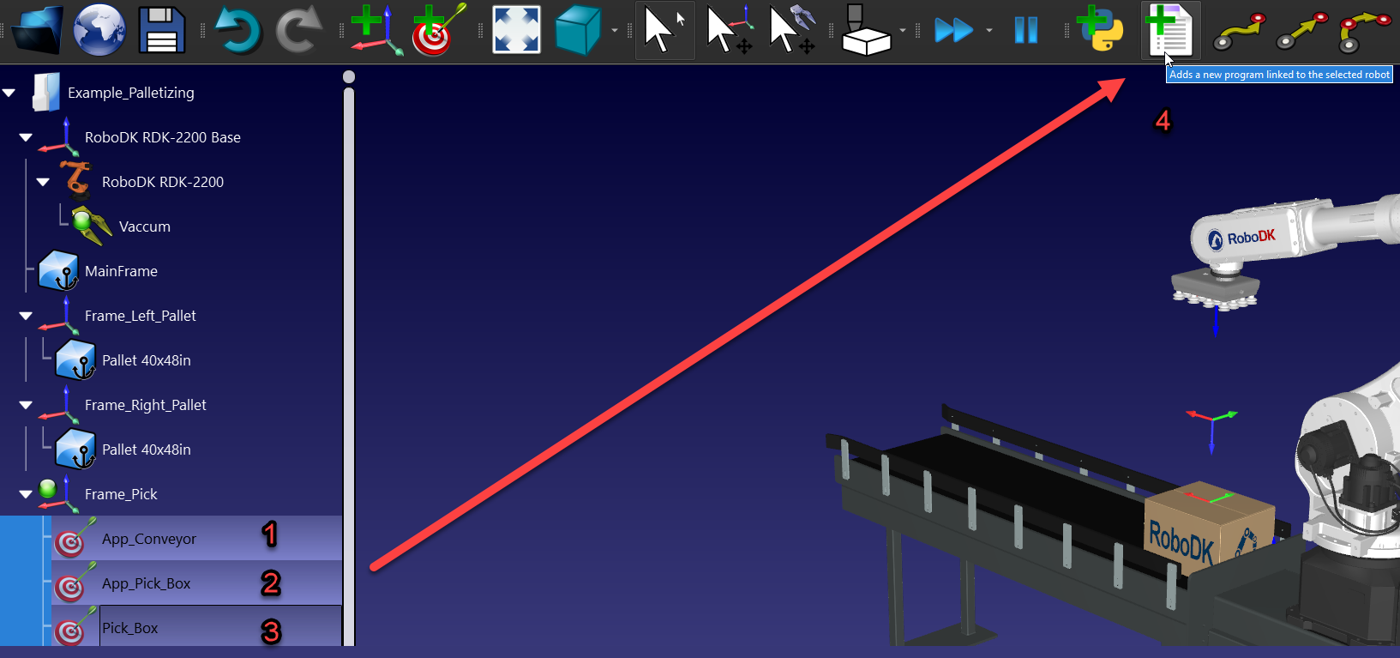
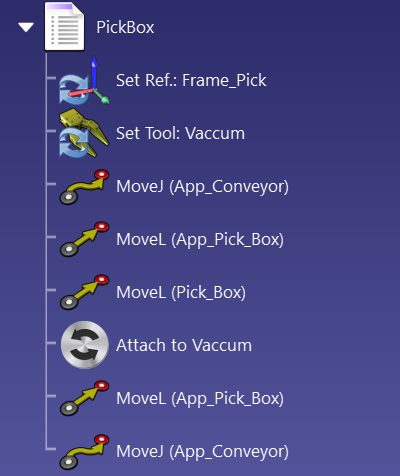
5.Tout en maintenant la touche CTRL enfoncée, cliquez sur les trois cibles dans l'ordre dans lequel vous souhaitez que le programme les exécute et cliquez sur "Créer un programme". Cela devrait automatiquement ajouter vos cibles, l'outil et le système de coordonnées au programme. Renommez le programme "PickBox".
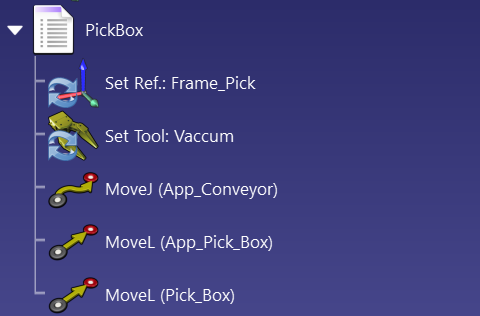
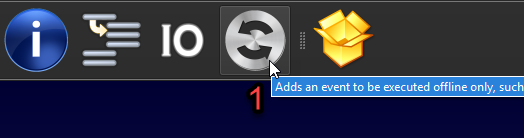
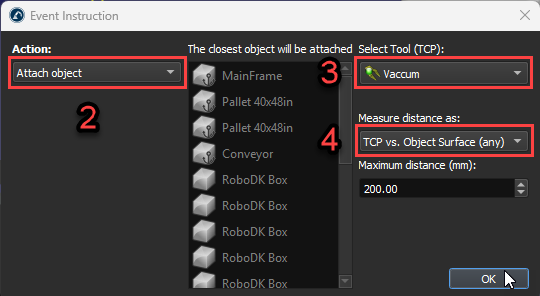
6.Ajoutez un "événement", sélectionnez "Attacher un objet", assurez-vous que c'est le bon outil qui est sélectionné, puis choisissez "CDO vs. surface de l'objet (quelconque)" dans les options de mesure de la distance. Cela permettra d'attacher la boîte à l'outil. Copiez et collez les cibles "App_Pick_Box" et "App_Conveyor" à la suite de l'événement ci-joint. Vous devriez maintenant avoir un programme de prélèvement fonctionnel
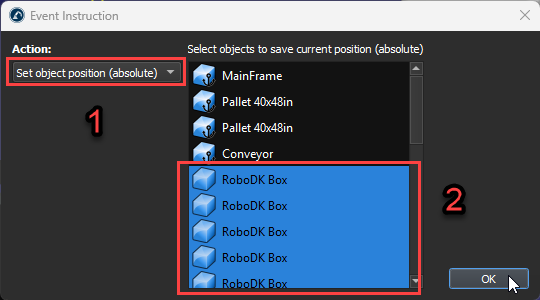
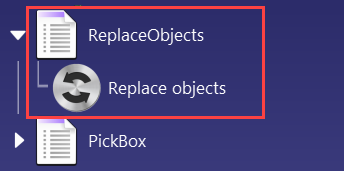
7.Créez un programme vide, ajoutez un événement, sélectionnez "Set object position (absolute)" et sélectionnez toutes vos boîtes. Ce programme ramènera les boîtes à leur position d'origine, ce qui vous permettra de réinitialiser votre station en un seul clic. Renommez le programme "ReplaceObjects".
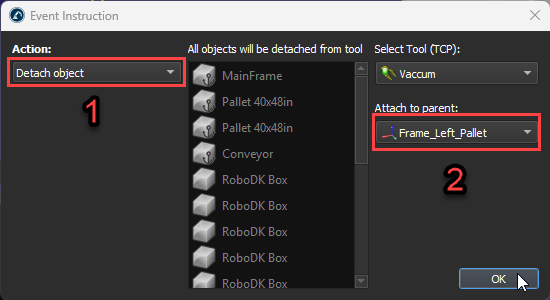
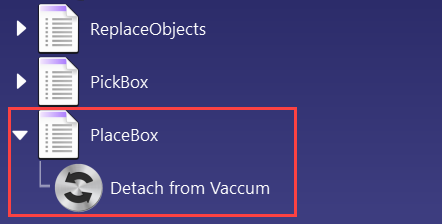
8.Créez un autre projet vide, ajoutez un événement, sélectionnez "Détacher l'objet" et sélectionnez le système de coordonnées auquel vous souhaitez que la boîte soit attachée après avoir été placée ; dans notre cas, ce sera "Système de coordonnées_Gauche_Palette". Renommez le programme "PlaceBox".
9.Enfin, la dernière exigence manquante est une cible qui sera utilisée comme référence de configuration. Activez le système de coordonnées de votre palette, déplacez votre robot au-dessus de celle-ci, assurez-vous que la configuration du robot est logique, puis créez une cible. Renommez-la "Ref_Palette".
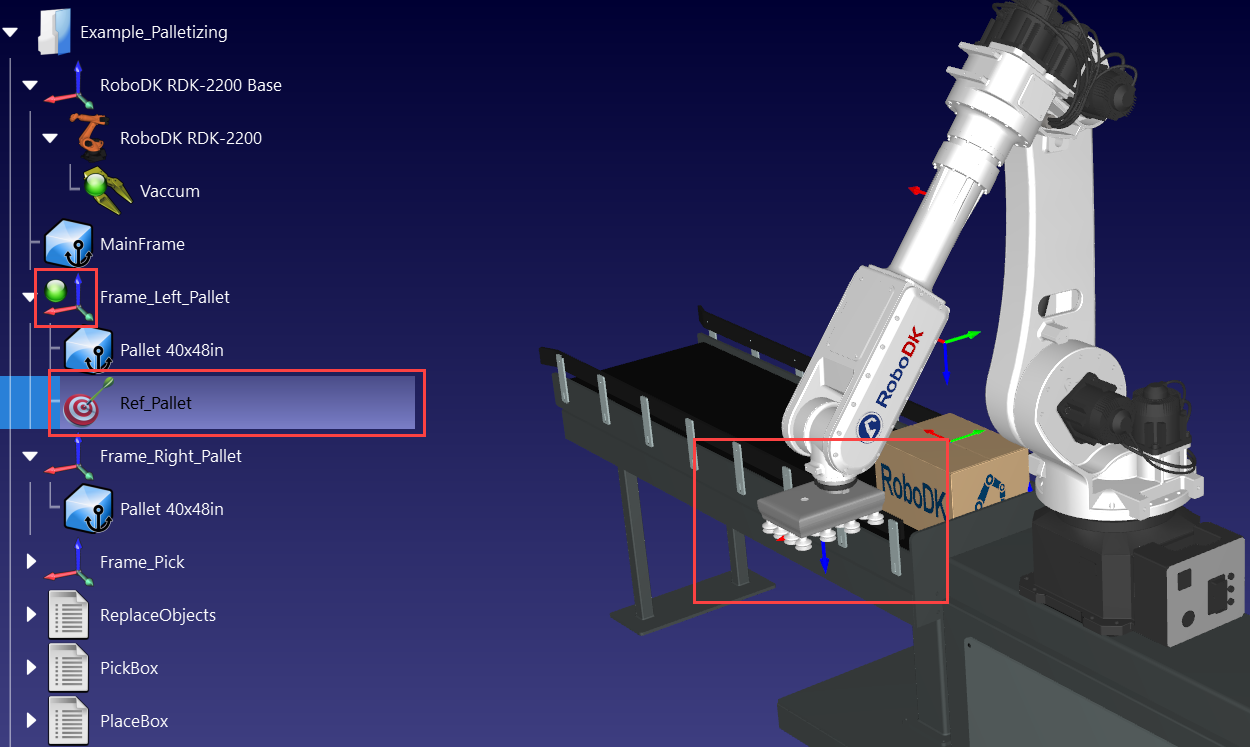
Vous avez maintenant tout ce qu'il faut pour créer votre projet de palettisation. Votre station devrait ressembler à ceci :