RoboDK Plugin for BobCAD-CAM
Introduction à BobCAD-FAO
L'Add-in RoboDK pour BobCAD-FAO vous permet de mettre en place rapidement des projets d'usinage robotisé directement à partir du logiciel BobCAD-FAO. Avec l'intégration RoboDK pour le logiciel BobCAD-FAO, vous pouvez facilement combiner le logiciel d'usinage BobCAD-FAO avec RoboDK pour simuler et programmer des bras de robots industriels pour l'usinage robotisé.
Avec cet Add-in de BobCAD, vous pouvez facilement générer des programmes sans erreur pour l'usinage robotisé directement à partir du logiciel BobCAD-FAO. RoboDK prend également en charge les fichiers d'usinage APT CLS et G-code.
Vous trouverez plus d'informations sur RoboDK pour l'usinage de robots dans la section Usinage de robots. Pour en savoir plus sur le logiciel BobCAD-FAO, visitez le site web de BobCAD.
Ce document décrit comment configurer le plugin RoboDK pour le logiciel BobCAD-FAO.
BobCAD-FAO Install
Suivez ces étapes pour installer l'Add-in RoboDK pour BobCAD-FAO. Assurez-vous d'utiliser BobCAD-FAO v3.4 ou une version ultérieure.
1.Ouvrez le dossier du plugin BobCAD-FAO dans RoboDK :
C:/RoboDK/Other/Plugin-BobCADCAM
Vous pouvez également télécharger le plugin RoboDK pour BobCAD-FAO
https://robodk.com/files/upload/BobCAD-FAO-RoboDK-plugin.zip
Marquez le plugin comme sûr :
faites un clic droit sur le dossier ZIP, sélectionnez Propriétés et cochez l'option Débloquer.
2.Exécutez le fichier Install.bat .
Si l'exécution du fichier Install.BAT échoue, vous pouvez extraire le contenu du dossier ZIP dans le dossier :
C:\BobCAD-FAO Data\BobCAD-FAO V34
ou dans votre répertoire d'installation équivalent. Fusionnez le contenu si nécessaire.
3.Redémarrez le logiciel BobCAD-FAO.
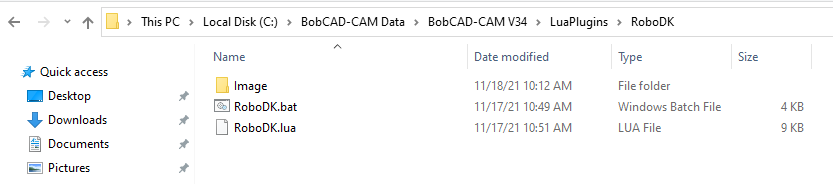
Le dossier d'installation du plugin doit ressembler à l'image suivante.
Barre d'outils
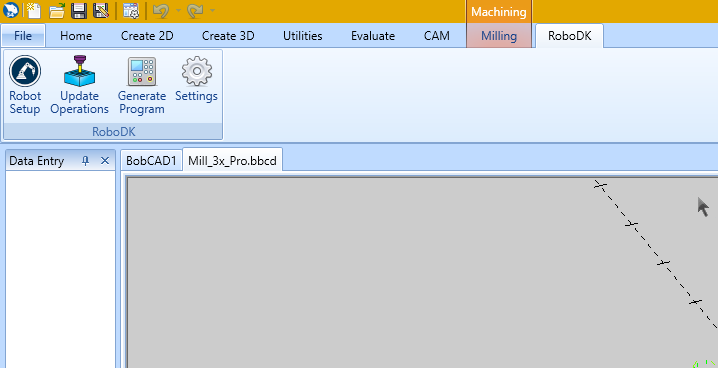
Lorsque vous ouvrez le logiciel BobCAD-FAO, vous devriez voir une barre d'outils RoboDK. Sélectionnez cet onglet RoboDK pour voir les options disponibles pour configurer votre projet d'usinage de robot dans RoboDK.
Installation du robot
Le bouton Configuration du robot
Vous pouvez facilement changer de robot, modifier l'outil et/ou le système de coordonnées. À titre d'exemple, suivez les étapes suivantes pour changer de robot :
1.Cliquez sur le robot avec le bouton droit de la souris
2.Sélectionnez Remplacer le robot (comme indiqué dans l'image)
3.Sélectionnez le nouveau robot
Le programme d'installation de RoboDK ne fournit que quelques robots par défaut, mais il est possible de télécharger d'autres robots à partir de la bibliothèque en ligne.
Vous trouverez plus d'informations sur l'ajout d'un outil de robot dans la section Prise en main.
Maintenez les touches Alt+Shift enfoncées pour déplacer un outil robot (CDO). Cette fonction est utile pour définir la pose du robot avant d'enseigner une cible.
Enregistrez le projet pour conserver les modifications en sélectionnant Fichier➔ Enregistrer la station (Ctrl+S).
Mise à jour des opérations sélectionnées
Sélectionnez le bouton Mettre à jour les opérations pour envoyer le parcours d'usinage du logiciel BobCAD-FAO à RoboDK. Cette opération remplacera tous les projets d'usinage de robot existants qui portent le même nom.
Une coche verte s'affiche si le programme est réalisable avec le robot sélectionné. En cas de problème (singularités, limites d'axe ou problèmes de portée), une marque rouge s'affiche, accompagnée d'un message indiquant le problème.
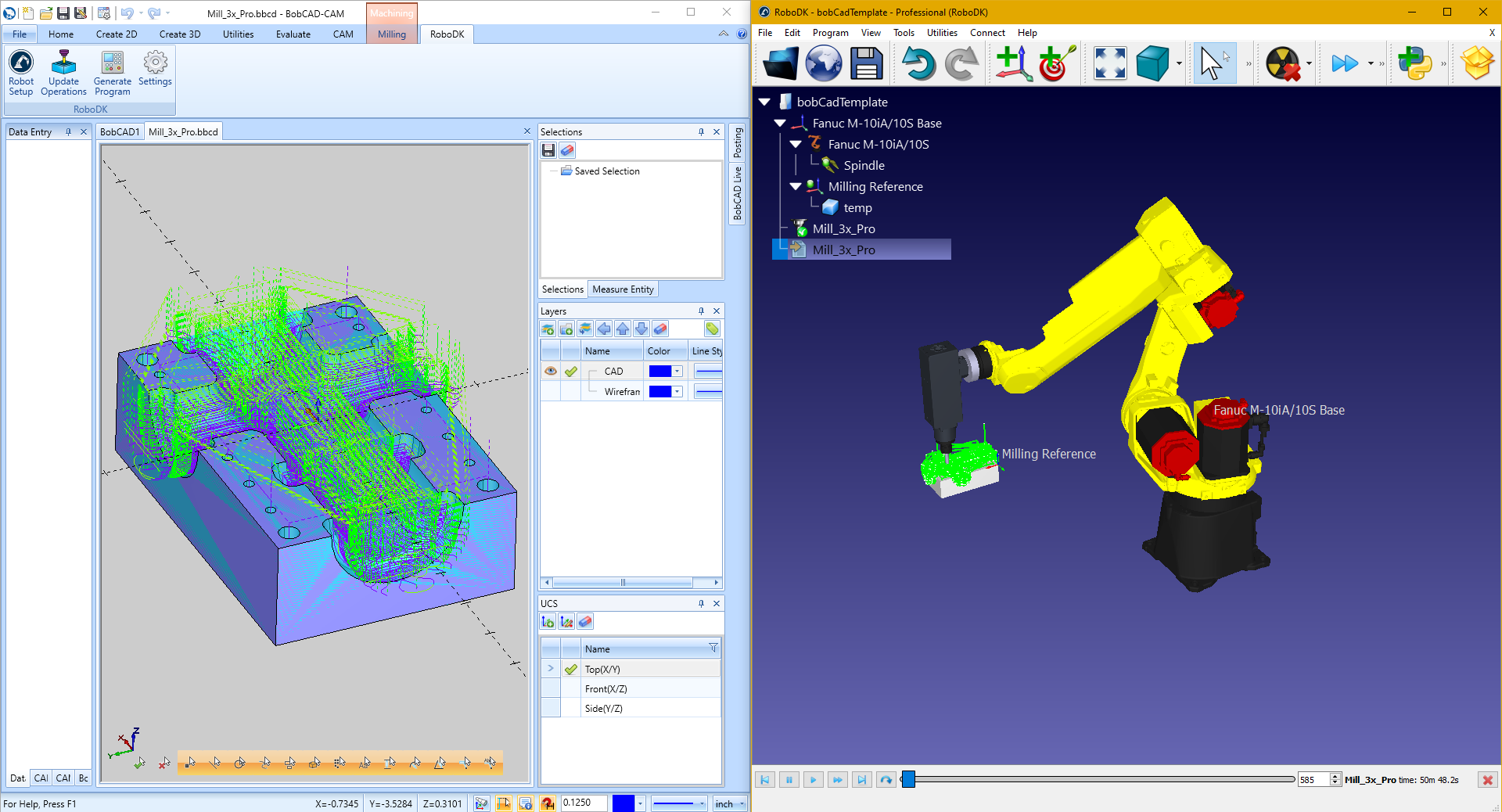
Double-cliquez sur le projet d'usinage du robot
Cliquez avec le bouton droit de la souris sur un programme et sélectionnez Exécuter pour le simuler (ou double-cliquez sur le programme). Vous pouvez également sélectionner Générer un programme de robot (F6) pour obtenir le programme de robot qui doit être chargé sur le système de commande du robot. Pour plus d'informations sur la génération de programmes de robot, reportez-vous à la section Programmation hors ligne.
Si nécessaire, cliquez avec le bouton droit de la souris sur un programme et sélectionnez Sélectionner le post-processeur pour modifier le post-processeur. Cette étape peut vous aider à personnaliser l'apparence de votre code généré. Vous trouverez de plus amples informations sur la sélection et la personnalisation des post-processeurs dans la section consacrée aux post-processeurs.
Générer un programme
Vous pouvez générer des programmes de robot directement à partir du logiciel BobCAD-FAO une fois que votre station RoboDK est prête. Pour ce faire, sélectionnez Générer un programme. Cette option mettra à jour les programmes de robot en fonction du parcours d'usinage défini dans votre projet BobCAD-FAO.
Procédez comme suit dans RoboDK pour afficher ou modifier l'emplacement des programmes de votre robot :
1.Sélectionnez Outils-Options
2.Sélectionnez l'onglet Programme
3.Sélectionnez Set dans le dossier des programmes du robot
Paramètres du plugin
Sélectionnez le bouton Paramètres pour ouvrir les paramètres liés au plugin RoboDK pour BobCAD-FAO.
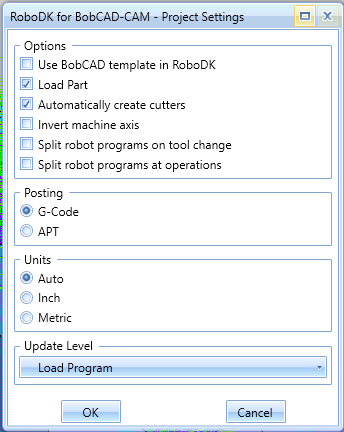
Vous pouvez notamment modifier les options suivantes :
1.Utilisez le modèle BobCAD-FAO au lieu du modèle RoboDK (les modèles de navigation 3D et de couleur dans RoboDK correspondront au style BobCAD-FAO).
2.Chargez et mettez à jour la pièce dans RoboDK chaque fois que vous enregistrez une nouvelle opération d'usinage. Seuls les solides et les surfaces visibles seront chargés.
3.Si vous cochez l'option Inverser l'axe de la machine-outil, vous prendrez automatiquement en compte le fait que l'axe Z de votre outil pointe vers l'intérieur de l'outil (au lieu de pointer vers l'extérieur).
4.Utilisez les fichiers G-Code au lieu des fichiers APT. RoboDK peut lire les fichiers suivants pour générer des simulations et des programmes de robot :
a.Fichiers APT (option par défaut) : Charge les fichiers APT natifs de BobCAD-FAO dans RoboDK. C'est la méthode préférée pour la plupart des opérations.
b.Fichiers G-code : Génère des fichiers d'usinage en code G. Notez que ce format dépend du post-processeur que vous avez sélectionné et qu'il est principalement conçu pour fonctionner avec des parcours d'usinage à 3 axes.