Paramètres du plugin
Sélectionnez la macro Paramètres pour ouvrir les paramètres FeatureCAM liés à RoboDK. Vous verrez la fenêtre de paramétrage illustrée dans l'image suivante.
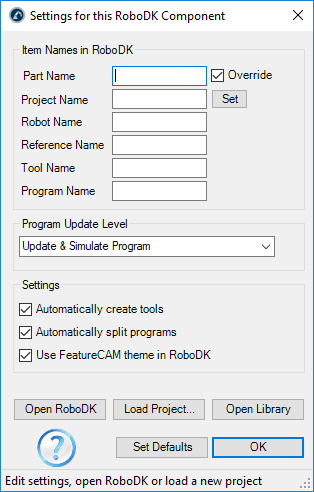
Vous pouvez modifier les options suivantes :
1.Le nom de la pièce est le nom du modèle 3D lorsqu'il est chargé dans RoboDK. Laissez ce champ vide pour utiliser automatiquement le nom utilisé dans FeatureCAM.
2.Nom du projet vous permet de spécifier un fichier de projet RoboDK (RDK). Il est possible de spécifier un projet RoboDK par défaut (fichier RDK) pour afficher automatiquement des simulations ou générer des programmes de robot. Laissez ce champ vide pour utiliser automatiquement le projet actuellement ouvert dans RoboDK.
3.Créer automatiquement des outils vous permet de créer automatiquement de nouveaux TCP en fonction du porte-outil et de la géométrie de l'outil définis dans FeatureCAM. Le premier outil tenu par le robot est considéré comme le porte-outil et les nouveaux TCP sont calculés comme un décalage par rapport au porte-outil.
4.La division automatique des programmes permet de diviser automatiquement le projet complet d'usinage du robot en sous-projets (opérations). Création d'une opération pour chaque outil.
5.L'utilisation du thème FeatureCAM dans RoboDK permet de faire correspondre la navigation 3D et les couleurs d'arrière-plan de RoboDK au style FeatureCAM.
Vous pouvez également spécifier le porte-outil et le système de coordonnées (datum) pour les opérations d'usinage de votre robot.
Sélectionnez Charger le projet... pour prévisualiser un projet récemment ouvert ou créer un nouveau projet en utilisant la configuration par défaut
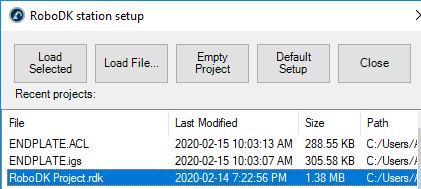
Les options suivantes sont disponibles :
●Charger le projet sélectionné : Chargez un projet précédent utilisé dans RoboDK (fichier RDK).
●Charger fichier... : Sélectionnez un fichier de station RoboDK (RDK) pour l'ouvrir avec RoboDK et l'utiliser comme projet par défaut avec le projet FeatureCAM actuel.
●Projet vide : Ouvrez RoboDK avec une nouvelle station vide pour construire une nouvelle installation. Pour plus d'informations sur la création d'un nouveau projet à partir de zéro, reportez-vous à la section Démarrage.
●Charger la pièce : Chargez la pièce de FeatureCAM vers RoboDK (la pièce sera enregistrée sous forme de fichier STL et chargée automatiquement).
●Configuration par défaut : Configurez une nouvelle station avec un robot, une broche et un système de coordonnées par défaut. La pièce sera également exportée automatiquement vers RoboDK.
Consultez la section sur l'usinage robotisé pour plus d'informations sur la construction d'une nouvelle installation pour l'usinage robotisé.