RoboDK Plugin for FeatureCAM
Introduction
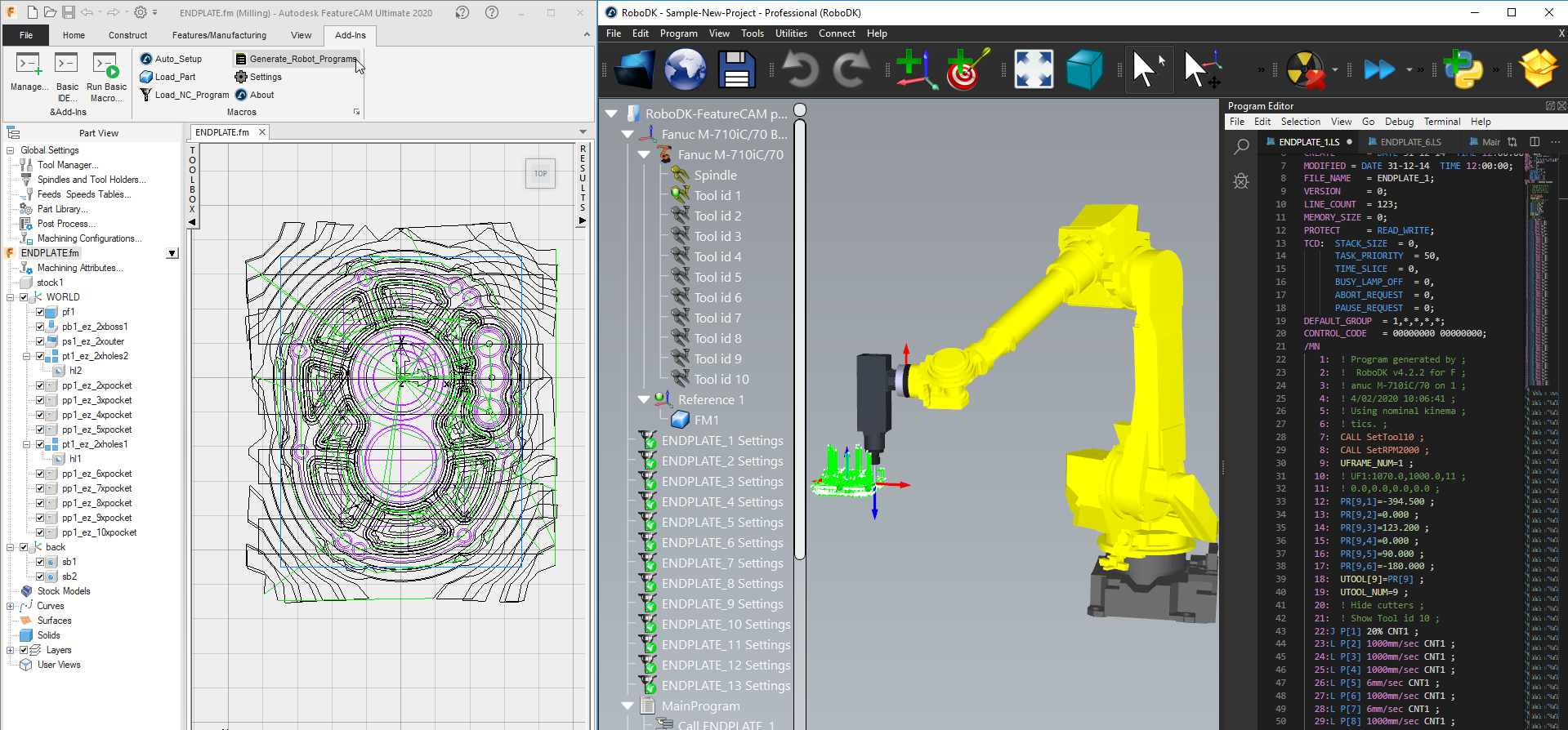
L'Add-in RoboDK pour Autodesk FeatureCAM vous permet de configurer rapidement des projets d'usinage de robots directement à partir de FeatureCAM. Avec l'Add-in RoboDK pour FeatureCAM, vous pouvez facilement combiner le logiciel FeatureCAM pour l'usinage et RoboDK pour simuler et programmer des bras de robots industriels pour l'usinage robotisé.
Vous trouverez plus d'informations sur RoboDK pour l'usinage de robots dans la section Usinage de robots.
Ce document décrit comment configurer le plugin pour FeatureCAM et comment utiliser la barre d'outils FeatureCAM pour configurer des projets d'usinage de robots dans RoboDK.
Add-in mis en place
Si vous avez installé RoboDK après avoir installé FeatureCAM, le plugin RoboDK pour FeatureCAM devrait déjà se trouver dans la bibliothèque Add-Ins.
Une fois que vous avez activé l'Add-in RoboDK, vous devriez voir les macros présentées dans l'image suivante.
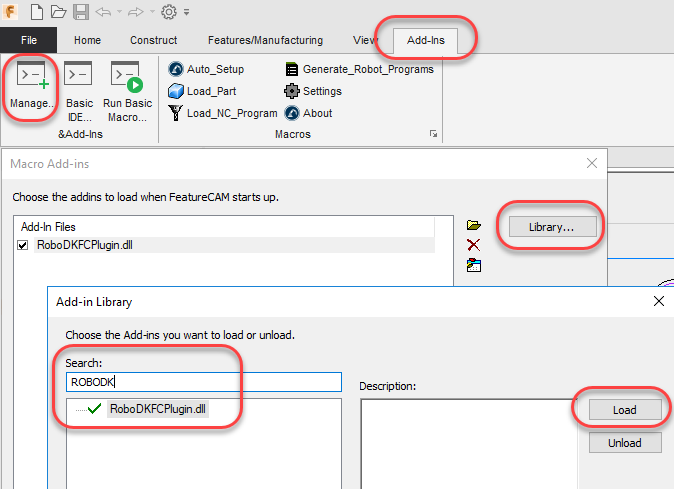
Si vous ne voyez pas les macros RoboDK, procédez comme suit pour configurer le complément RoboDK pour FeatureCAM :
1.Lancez FeatureCAM.
2.Sélectionnez Add-ins➔ Manage
3.Sélectionnez Bibliothèque...
4.Recherchez la bibliothèque RoboDKFCPlugin.dll (vous pouvez taper RoboDK pour la localiser rapidement).
5.Sélectionnez la charge
6.Sélectionnez OK.
FeatureCAM affiche alors les commandes RoboDK dans la section Add-ins, comme le montre l'image suivante.
Commandes
Cette section décrit les commandes du module d'extension RoboDK disponibles dans FeatureCAM pour l'usinage de robots.
●La macro Auto Setup charge automatiquement la pièce et le programme d'usinage dans RoboDK.
●Charger la pièce charge automatiquement le modèle 3D de votre pièce dans RoboDK.
●Charger le programme CN crée automatiquement un projet d'usinage robotisé dans RoboDK pour simuler votre robot et créer un programme d'usinage robotisé.
●Générer des programmes de robot génère automatiquement les programmes de robot disponibles dans RoboDK.
●Paramètres ouvre une fenêtre de paramètres supplémentaires.
●À propos ouvre ce document d'aide.
Auto Setup
La configuration automatique
La configuration automatique chargera/mettra à jour le modèle 3D et le parcours d'usinage de votre robot dans RoboDK.
Si vous avez déjà une station RoboDK ouverte, elle utilisera le projet RoboDK existant sans modifier le robot, l'outil ou le système de coordonnées.
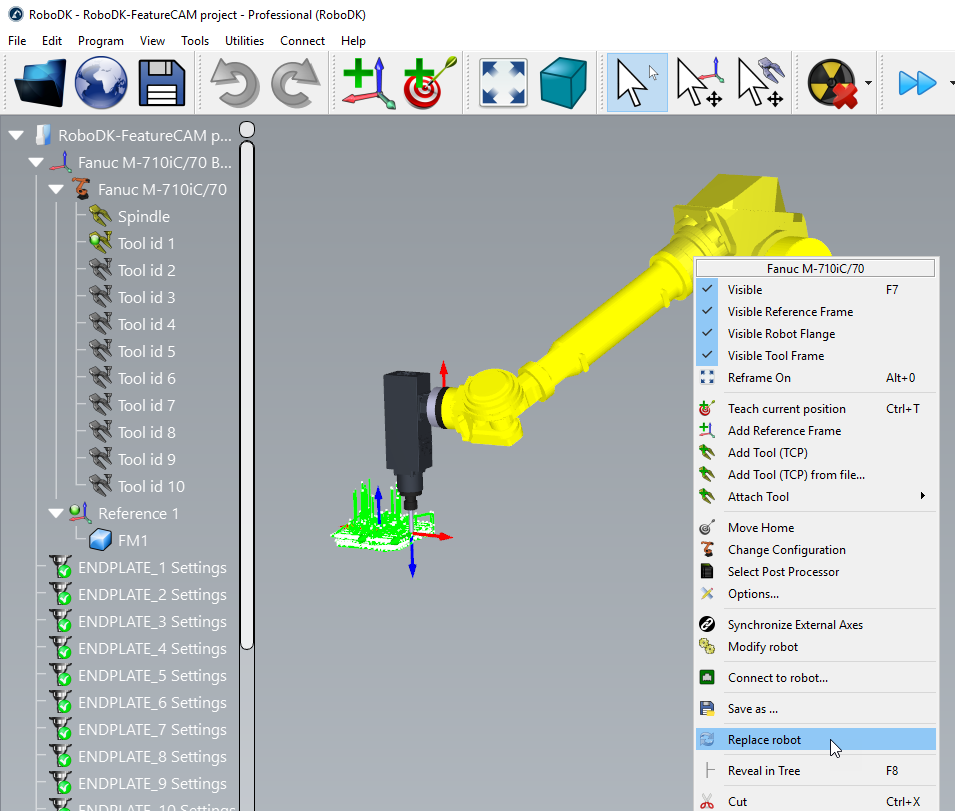
Vous pouvez facilement changer de robot, modifier l'outil et/ou le système de coordonnées. À titre d'exemple, suivez les étapes suivantes pour changer de robot :
1.Cliquez sur le robot avec le bouton droit de la souris
2.Sélectionnez Remplacer le robot (comme indiqué dans l'image suivante).
3.Sélectionnez le robot que vous souhaitez utiliser
Le programme d'installation de RoboDK ne fournit que quelques robots par défaut, mais il est possible de télécharger d'autres robots à partir de la bibliothèque en ligne.
Vous trouverez plus d'informations sur l'ajout d'un outil de robot dans la section Prise en main.
Enregistrez le projet pour conserver les modifications en sélectionnant Fichier➔ Enregistrer la station (Ctrl+S).
Une fois la cellule du robot mise à jour, sélectionnez Utilitaires➔ Mettre à jour le projet d'usinage du robot pour mettre à jour tous les programmes. Une coche verte s'affiche si les programmes sont réalisables avec les paramètres actuels de la cellule. En cas de problème (singularités, limites d'axe ou problèmes de portée), une marque rouge s'affiche.
Double-cliquez sur le projet d'usinage du robot
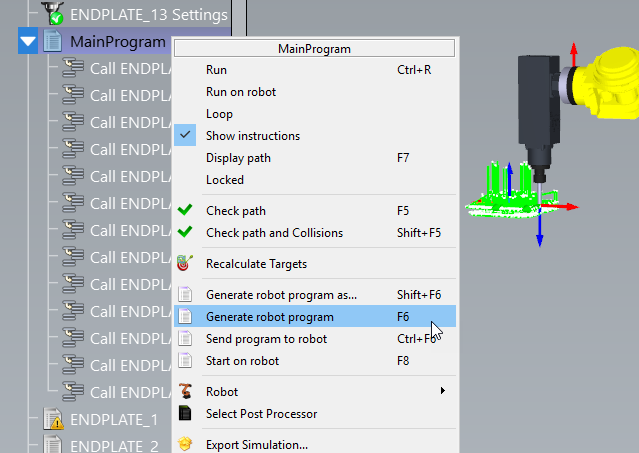
Cliquez avec le bouton droit de la souris sur un programme et sélectionnez Exécuter pour le simuler (ou double-cliquez sur le programme). Vous pouvez également sélectionner Générer un programme de robot (F6) pour générer le programme de robot pour votre contrôleur de robot. Pour plus d'informations sur la génération de programmes de robot, reportez-vous à la section Programmation hors ligne.
Vous pouvez également cliquer avec le bouton droit de la souris sur un programme et sélectionner Sélectionner le post-processeur pour changer de post-processeur. Vous trouverez plus d'informations sur les processeurs de post-production dans la section consacrée aux processeurs de post-production.
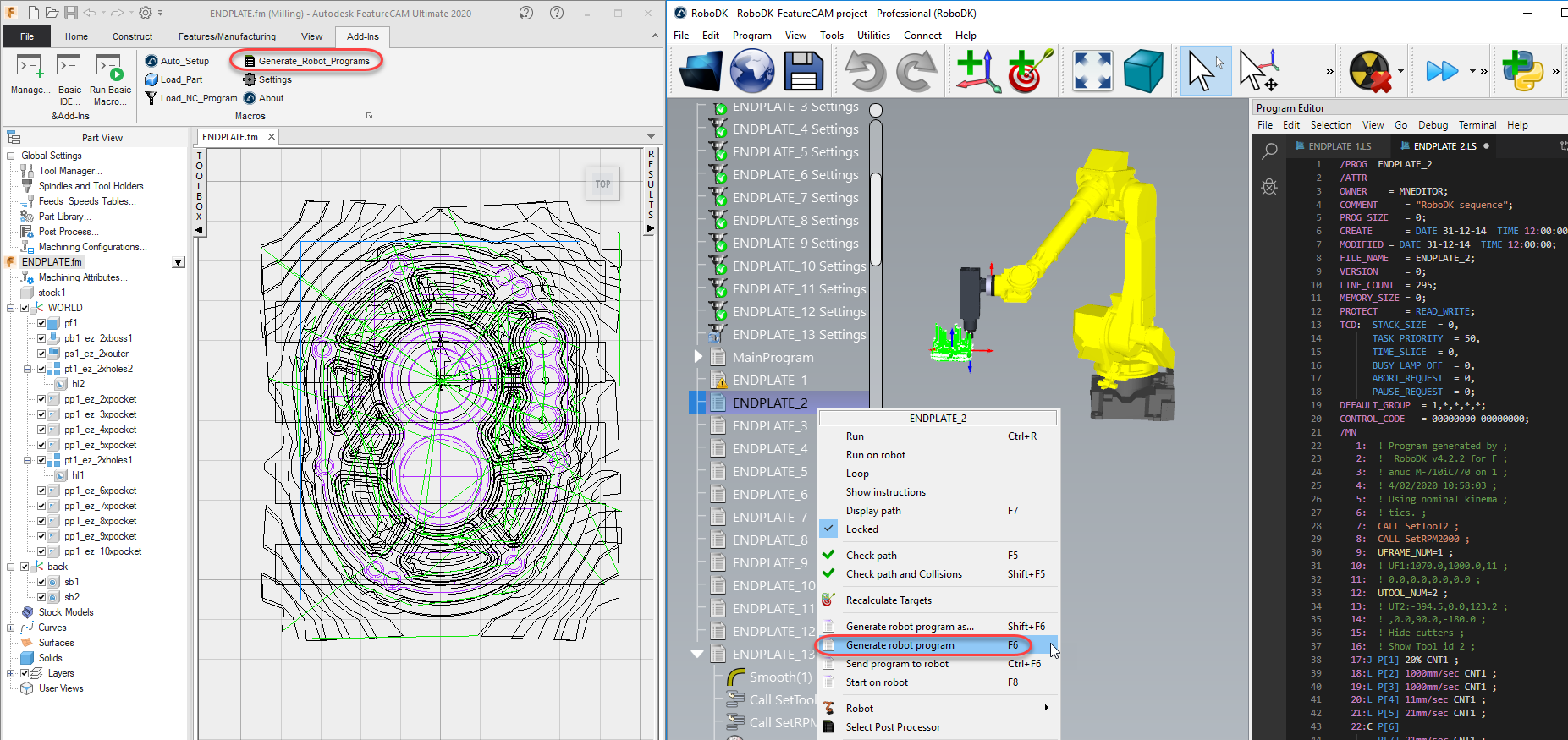
Générer des programmes de robots
Sélectionnez Générer des programmes de robot pour générer les programmes de robot pour l'usinage robotisé. Cette opération ouvre une nouvelle fenêtre (éditeur de programmes) affichant les programmes de robot.
Procédez comme suit dans RoboDK pour modifier l'emplacement de vos programmes de robot enregistrés :
1.Sélectionnez Outils-Options
2.Sélectionnez le programme
3.Sélectionnez Set à côté du dossier des programmes Robot
Paramètres du plugin
Sélectionnez la macro Paramètres pour ouvrir les paramètres FeatureCAM liés à RoboDK. Vous verrez la fenêtre de paramétrage illustrée dans l'image suivante.
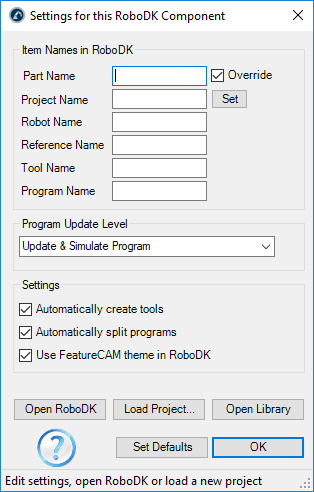
Vous pouvez modifier les options suivantes :
1.Le nom de la pièce est le nom du modèle 3D lorsqu'il est chargé dans RoboDK. Laissez ce champ vide pour utiliser automatiquement le nom utilisé dans FeatureCAM.
2.Nom du projet vous permet de spécifier un fichier de projet RoboDK (RDK). Il est possible de spécifier un projet RoboDK par défaut (fichier RDK) pour afficher automatiquement des simulations ou générer des programmes de robot. Laissez ce champ vide pour utiliser automatiquement le projet actuellement ouvert dans RoboDK.
3.Créer automatiquement des outils vous permet de créer automatiquement de nouveaux TCP en fonction du porte-outil et de la géométrie de l'outil définis dans FeatureCAM. Le premier outil tenu par le robot est considéré comme le porte-outil et les nouveaux TCP sont calculés comme un décalage par rapport au porte-outil.
4.La division automatique des programmes permet de diviser automatiquement le projet complet d'usinage du robot en sous-projets (opérations). Création d'une opération pour chaque outil.
5.L'utilisation du thème FeatureCAM dans RoboDK permet de faire correspondre la navigation 3D et les couleurs d'arrière-plan de RoboDK au style FeatureCAM.
Vous pouvez également spécifier le porte-outil et le système de coordonnées (datum) pour les opérations d'usinage de votre robot.
Sélectionnez Charger le projet... pour prévisualiser un projet récemment ouvert ou créer un nouveau projet en utilisant la configuration par défaut
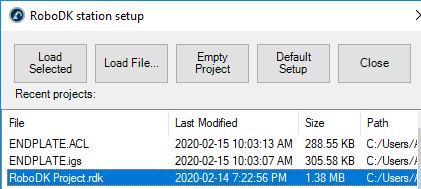
Les options suivantes sont disponibles :
●Charger le projet sélectionné : Chargez un projet précédent utilisé dans RoboDK (fichier RDK).
●Charger fichier... : Sélectionnez un fichier de station RoboDK (RDK) pour l'ouvrir avec RoboDK et l'utiliser comme projet par défaut avec le projet FeatureCAM actuel.
●Projet vide : Ouvrez RoboDK avec une nouvelle station vide pour construire une nouvelle installation. Pour plus d'informations sur la création d'un nouveau projet à partir de zéro, reportez-vous à la section Démarrage.
●Charger la pièce : Chargez la pièce de FeatureCAM vers RoboDK (la pièce sera enregistrée sous forme de fichier STL et chargée automatiquement).
●Configuration par défaut : Configurez une nouvelle station avec un robot, une broche et un système de coordonnées par défaut. La pièce sera également exportée automatiquement vers RoboDK.
Consultez la section sur l'usinage robotisé pour plus d'informations sur la construction d'une nouvelle installation pour l'usinage robotisé.
Exemples
Usinage robotique à 3 axes
Cet exemple montre comment créer un projet d'usinage de robot 3 axes à l'aide du plugin FeatureCAM.
Usinage robotique 5 axes
Cet exemple montre comment créer un projet de découpe de robot 5 axes à l'aide du plugin FeatureCAM.