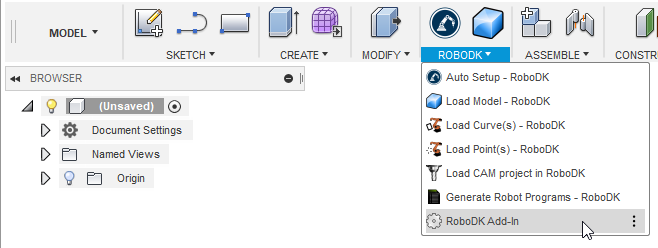
La barre d’outils RoboDK par défaut pour Autodesk Fusion 360 comprend une barre d’outils dédiée pour RoboDK avec 7 commandes à des fins de CAO et FAO.
Astuce : Sélectionner Pin to Toolbar (dans le menu de droite) pour voir une commande spécifique en haut de la barre d’outils.
● Auto Setup – Ce bouton vous permet de charger n’importe quelle géométrie sélectionnée (courbes ou points). Vous pouvez également sélectionner des surfaces pour extraire la courbe normale. La géométrie sera chargée dans RoboDK avec le modèle 3D.
Astuce : Pour sélectionner plusieurs géométries (entités)maintenir la touche Ctrl enfoncée. Bien sélectionner la géométrie avant de déclencher les commandes.
●Load Part – Charger le modèle 3D de Fusion 360 à RoboDK. Les caractéristiques telles que les courbes ou les points ne seront pas chargés.
●Load Point(s) – Charger tous les points sélectionnés dans RoboDK comme un nouvel objet. Toutes les surfaces sélectionnées seront utilisées pour calculer les points normaux. Ces normales sont importantes car elles définissent l’axe d’approche du robot.
●Load Curve(s) – Charger toutes les courbes sélectionnées dans RoboDK comme un nouvel élément. Toutes les surfaces sélectionnées seront utilisées pour calculer les courbes normales. Ces normales sont importantes car elles vont définir l’axe d’approche du robot.
●Load CAM Project – Charger le projet d’usinage dans RoboDK. Si plusieurs outils sont utilisés pour l’usinage, RoboDK divisera automatiquement le programme pour avoir des paramètres pour chaque outil. Ce comportement peut être modifié dans Tools-Options-CAM.
●Generate Robot Program – Générer tous les programmes disponibles dans le projet RoboDK.
La principale différence entre Auto Setup et Load Curve(s) ou Load Point(s) est que Auto Setup charge la pièce et crée un nouveau projet de suivi Curve/Point. L’utilisation de Load Curve(s) ou Load Point(s) est plus rapide et ne fera que mettre à jour les caractéristiques géométriques existantes dans RoboDK, en conservant les paramètres définis précédemment.
Astuce : En utilisant les paramètres par défaut, pour charger plus d’un objet de Fusion, renommer les objets une fois qu’ils ont été chargés dans RoboDK.
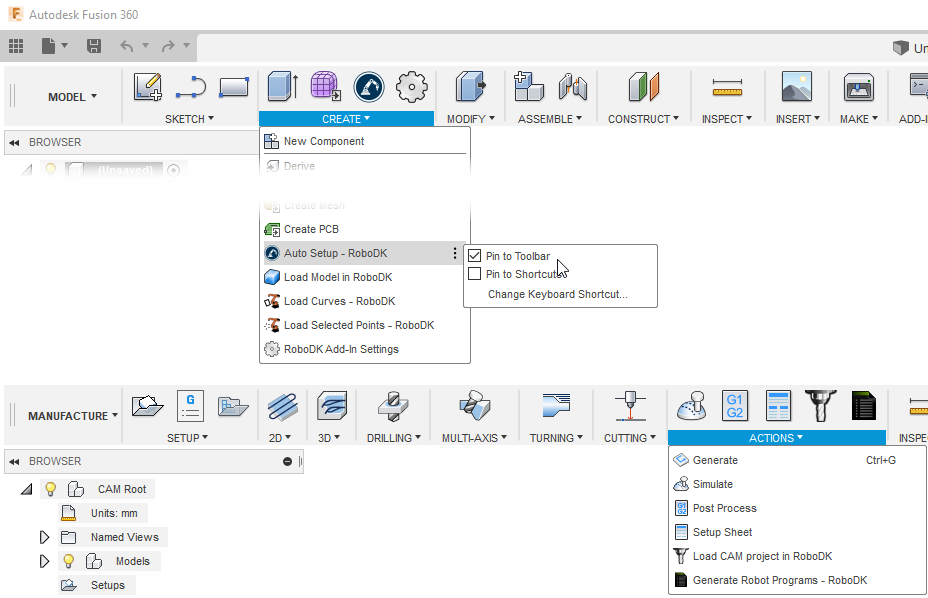
Il est possible également 5 commandes sous l’onglet CREATE dans l’espace de travail MODEL (fonctions CAO) et 2 commandes sous l’onglet ACTIONS dans l’espace de travail MANUFACTURE (fonctions FAO)