Commandes
Paramétrage Robot
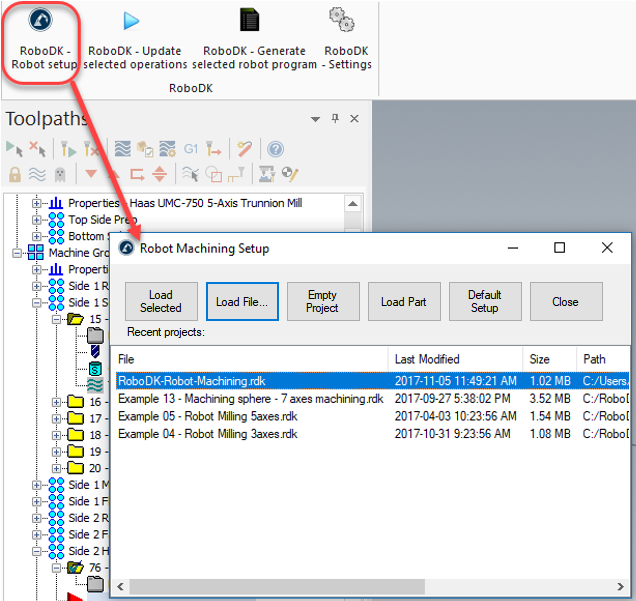
Le bouton Robot setup
●Load Selected : Charger un projet existant dans RoboDK (RDK file)
●Load File… : Sélectionner un fichier à ouvrir avec RoboDK et utiliser le comme projet par défaut avec le projet ouvert dans Mastercam.
●Empty Project : Ouvrir RoboDK avec un nouvel écran vide pour permettre à l’utilisateur de créer une nouvelle configuration. Plus d’informations pour mettre en place un nouveau projet à partir de zéro disponibles dans la section Démarrer
●Load Part : Charger la pièce de Mastercam à RoboDK (la pièce sera sauvegardée sous forme de fichier STL et chargée automatiquement).
●Default Setup : Configurer une nouvelle station avec un robot, une broche et un repère par défaut. La pièce sera également automatiquement exportée vers RoboDK
Pour plus d’information à propos de la conception d’un nouveau projet visiter la section usinage par robot .
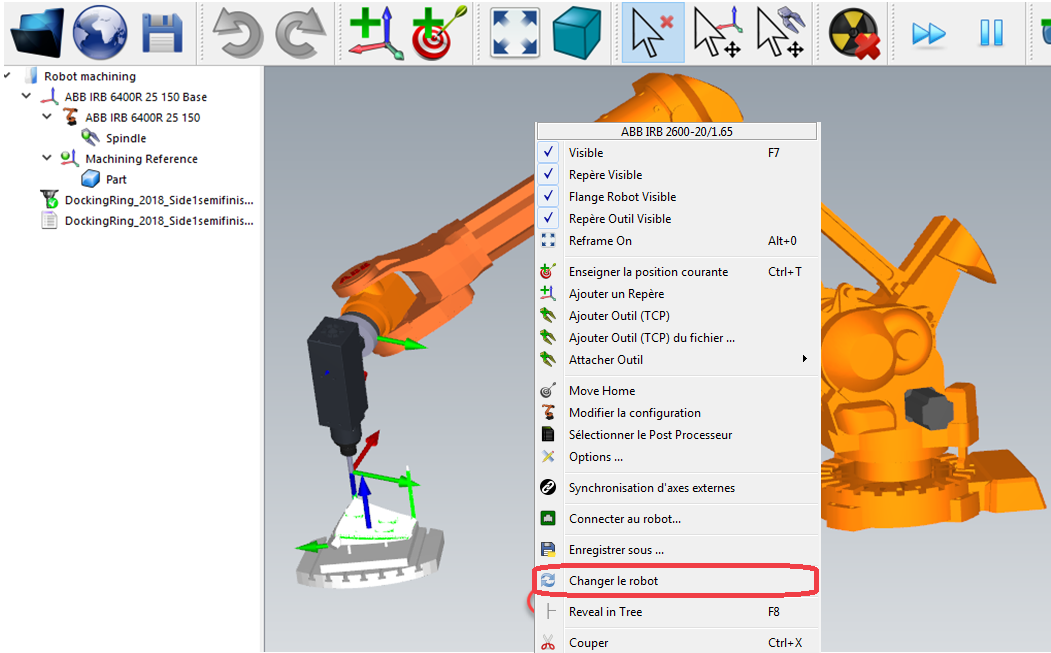
Il est également possible de changer le robot, de modifier l’outil et/ou le repère. Par exemple, suivre ces étapes pour changer le robot
1.Faire un clic droit sur le robot
2.Sélectionner Changer le robot (tel que montré dans l’image)
3.Sélectionner le nouveau robot
L’installateur RoboDK ne fournit que quelques robots par défaut, cependant, il est possible de télécharger plus de robots à partir de la bibliothèque en ligne.
Plus d’information à propos de l’ajout d’un outil robot disponible dans la Section de démarrage.
Enregistrer le projet pour conserver les changements en sélectionnant Fichier➔Enregistrer Station (Ctrl+S).
Mettre à jour les opérations sélectionnées
Sélectionner Update selected operations
Cette action tentera d’obtenir le programme d’usinage robot pour les opérations sélectionnées. Un crochet vert s’affiche si le programme est réalisable avec le robot sélectionné. S’il y a des problèmes (comme des singularités, des limites d’axe ou des problèmes de portée), un repère rouge s’affiche.
Double-cliquer sur le projet d’usinage robot
Faire un clic droit sur un programme et sélectionner Exécuter pour le simuler (ou double-cliquer sur le programme). Il est possible également de sélectionner Générer programme robot (F6) pour obtenir le programme de robot qui doit être chargé sur le contrôleur de robot. Plus d’informations sur la façon de générer des programmes de robots sont disponibles dans la section Programmation hors ligne.
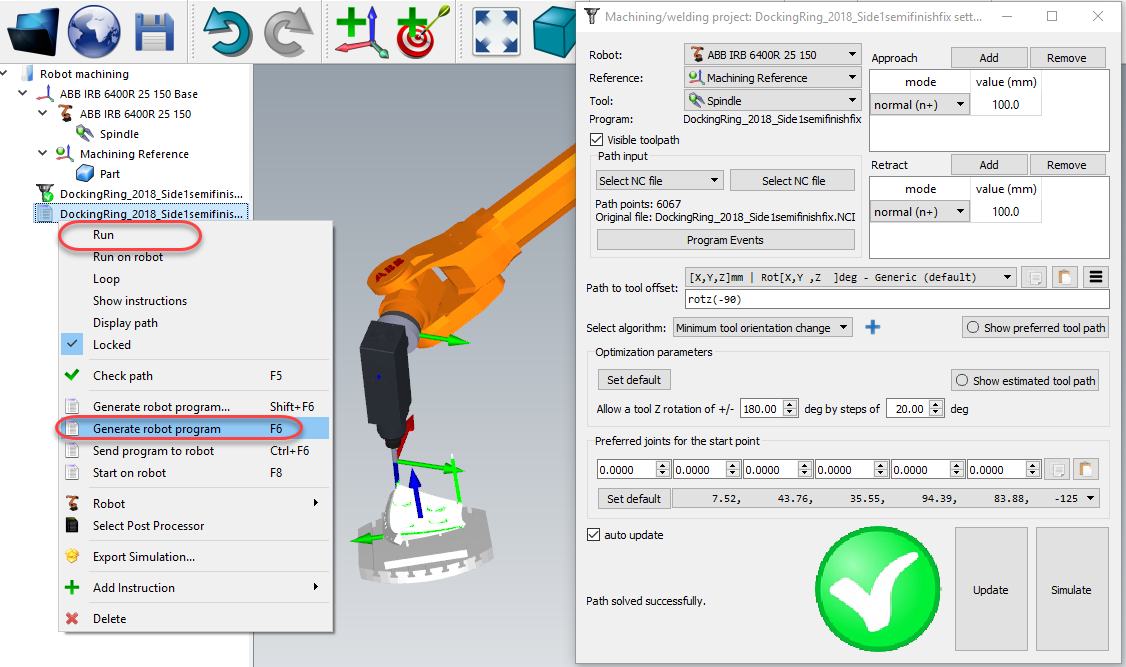
Si vous le souhaitez, faire un clic droit sur un programme et sélectionner Sélectionner le Post Processeur pour changer le post-processeur. Plus d’informations sur les post-processeurs disponibles dans la section post-processeurs.
Générer des programmes robot depuis Mastercam
Il est possible de générer des programmes robots directement depuis Mastercam une fois la station sauvegardée. Pour ce faire, sélectionner Generate selected robot program 
RoboDK ne va pas apparaitre à moins qu’il y ait des problèmes dans le programme.
Ce bouton peut être utilisé même si RoboDK n’est pas démarré.
Les programmes de robot sont enregistrés sur le bureau par défaut. Suivre ces étapes dans RoboDK pour changer ce paramètre :
1.Sélectionner Outils-Options
2.Sélectionner Autres
3.Sélectionner Set dans Robot programs folder
Plugin Settings
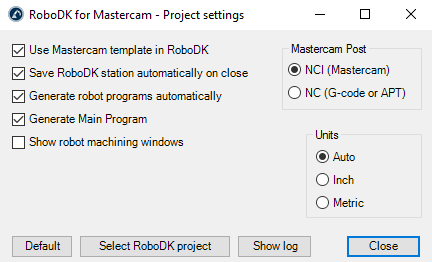
Sélectionner RoboDK Settings 
Il est possible de modifier les options suivantes :
1.Utiliser le modèle Mastercam au lieu du modèle RoboDK (les modèles de navigation 3D et de couleur dans RoboDK correspondront au style Mastercam).
2.Enregistrer la station RoboDK automatiquement lorsque RoboDK est fermé.
3.Créer un programme principal pour les projets comportant plus d’un programme.
4.Utiliser des fichiers NC (comme APT ou G-code) au lieu de fichiers NCI. RoboDK peut lire les fichiers suivants pour générer des programmes de robots :
a.NCI : Parcours outil natif pour Mastercam.
b.Fichier G-code (requière d’avoir un post processeur utilisant 5 axes).
c.Fichier APT (requière un post processeur).
5.Sélectionner le projet actif. Il est possible de spécifier un projet RoboDK par défaut (fichier RDK) pour afficher automatiquement des simulations ou générer des programmes de robot.