Exemples
Les 2 sections suivantes présentent un exemple d’usinage 3 axes et un exemple de coupe robot 5 axes.
Robot d’usinage 3 Axes
Cet exemple montre comment créer un projet d’usinage robot 3 axes en utilisant le plugin Mastercam.
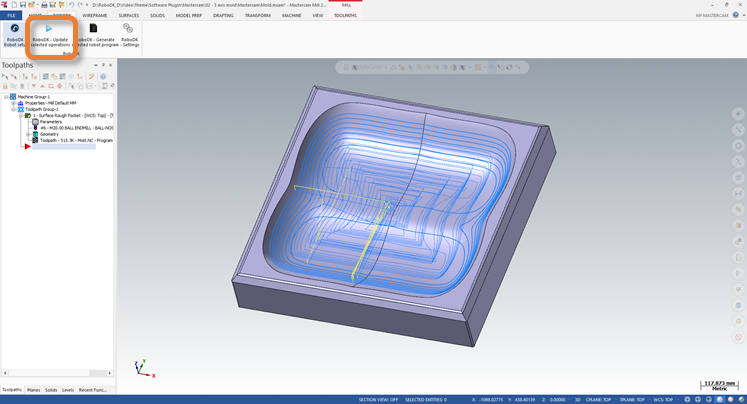
1.Charger la pièce dans Mastercam.
2.Créer le parcours outil utilisant Mastercam Mill tools (outils de fraisage).
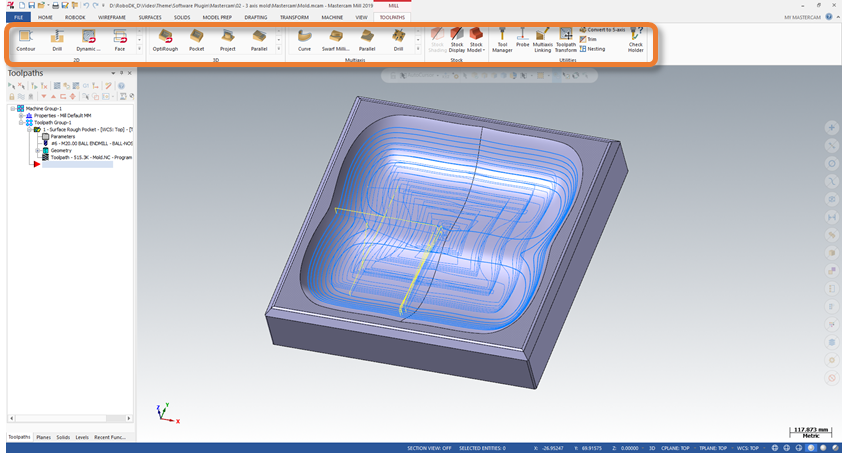
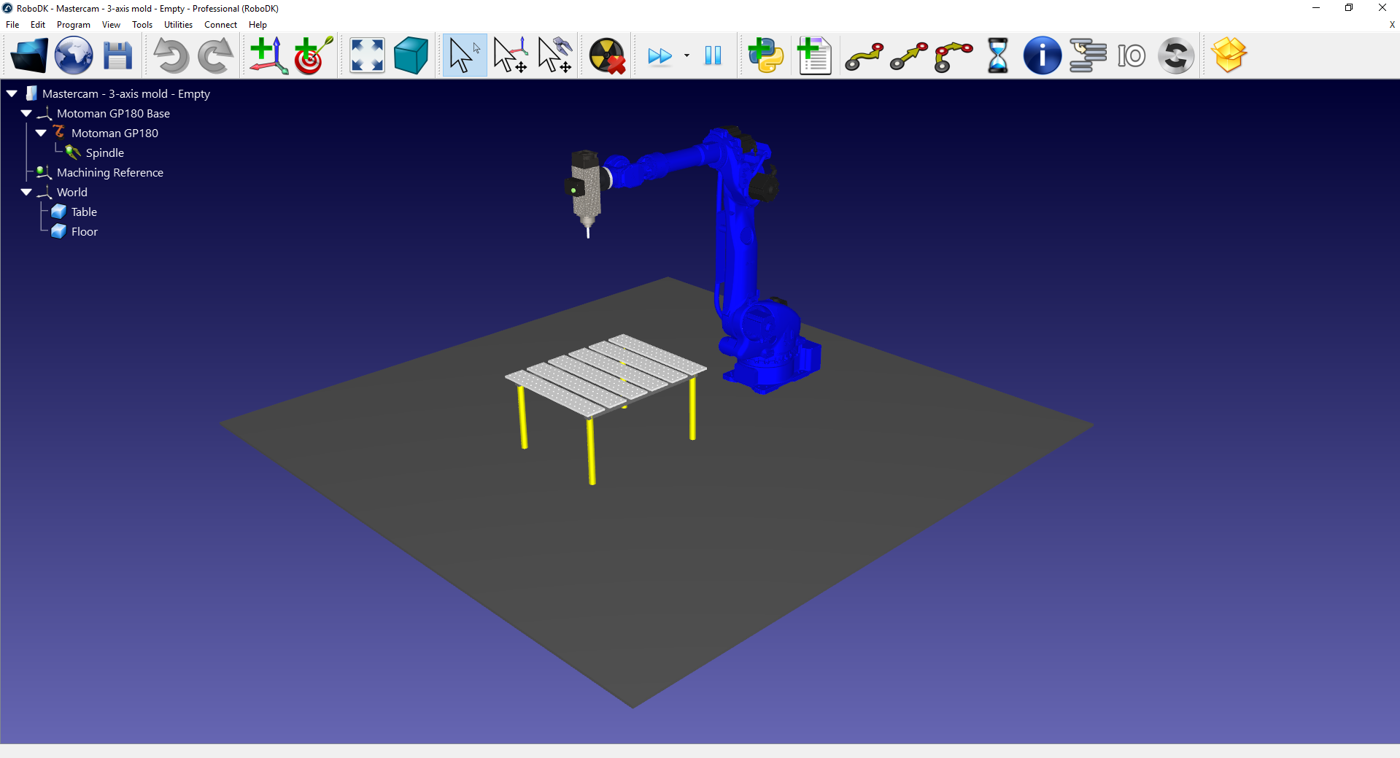
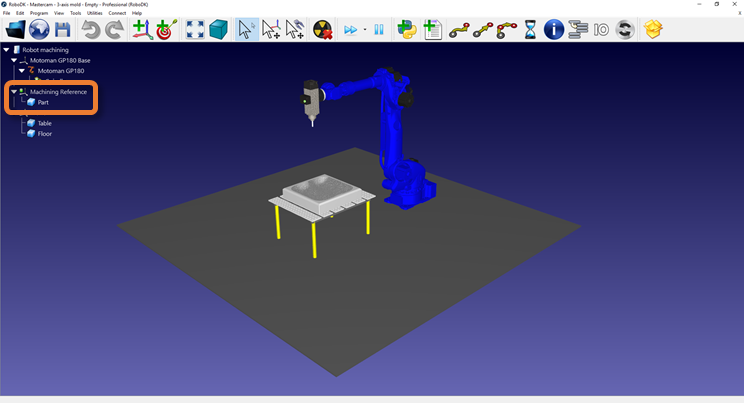
3.Créer une station dans RoboDK avec votre robot, votre broche et tout autre objet requis.
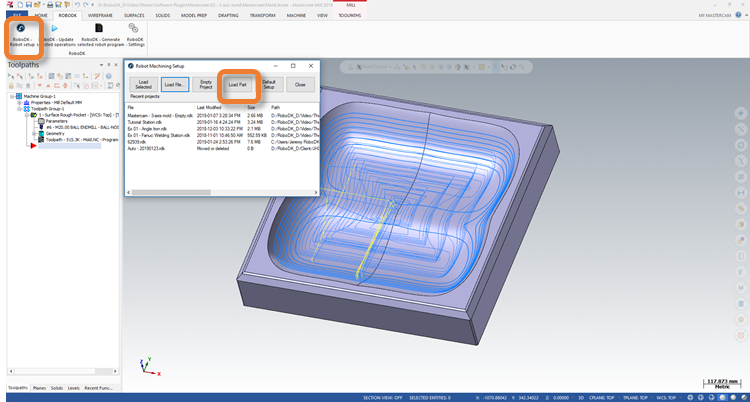
4.Dans le ruban du plugin RoboDK, sélectionner RoboDK ➔ Robot setup.
5.Dans la fenêtre Robot Machining Setup, sélectionner Load Part.
6.Dans RoboDK, ajuster la position du repère Machining Reference si nécessaire.
7.Dans le ruban du plugin RoboDK, sélectionner RoboDK ➔ Update selected operations.
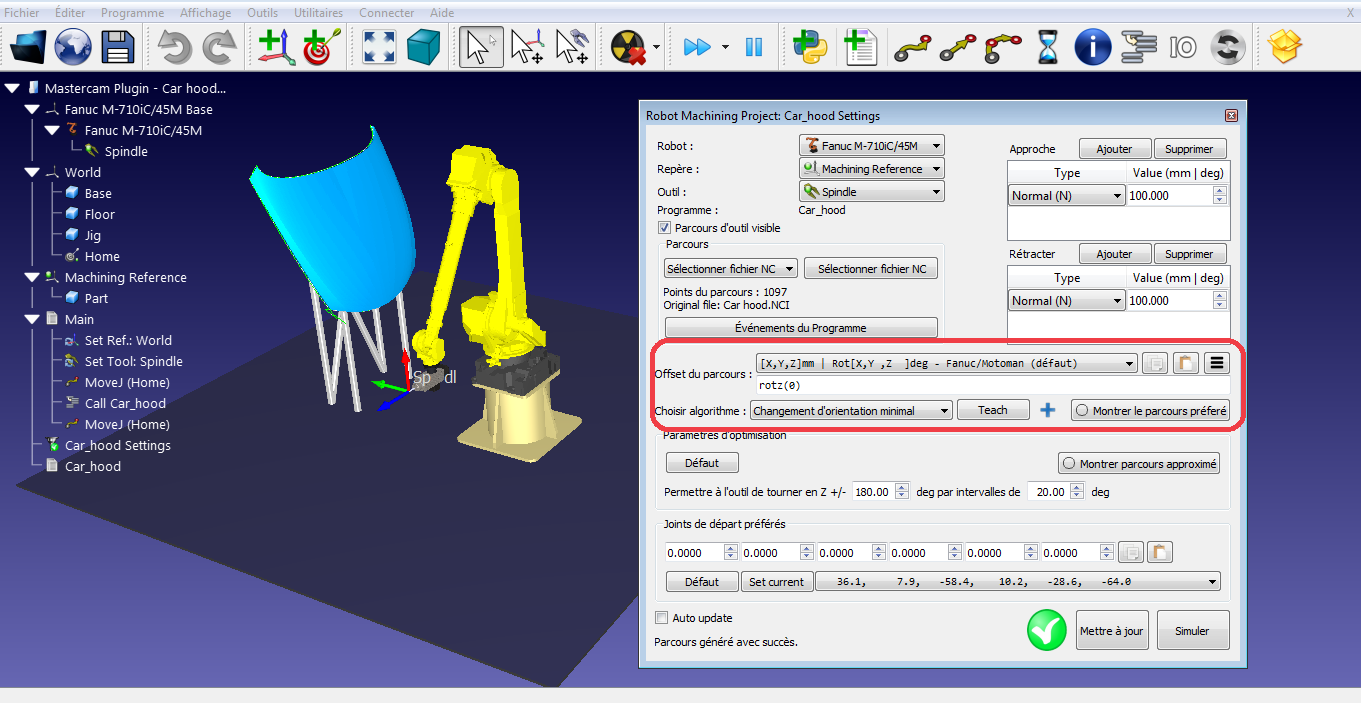
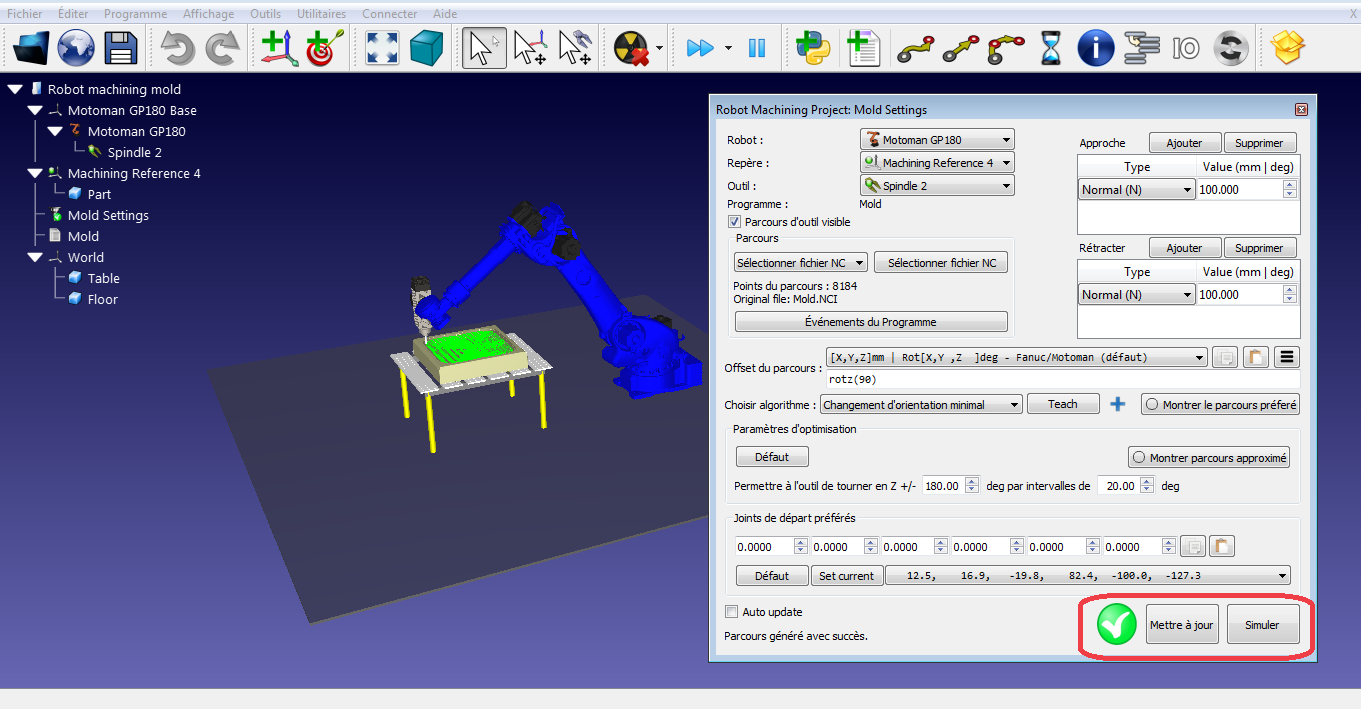
8.Dans RoboDK, sélectionner Mettre à jour et Simuler dans la fenêtre du Robot Machining Project.
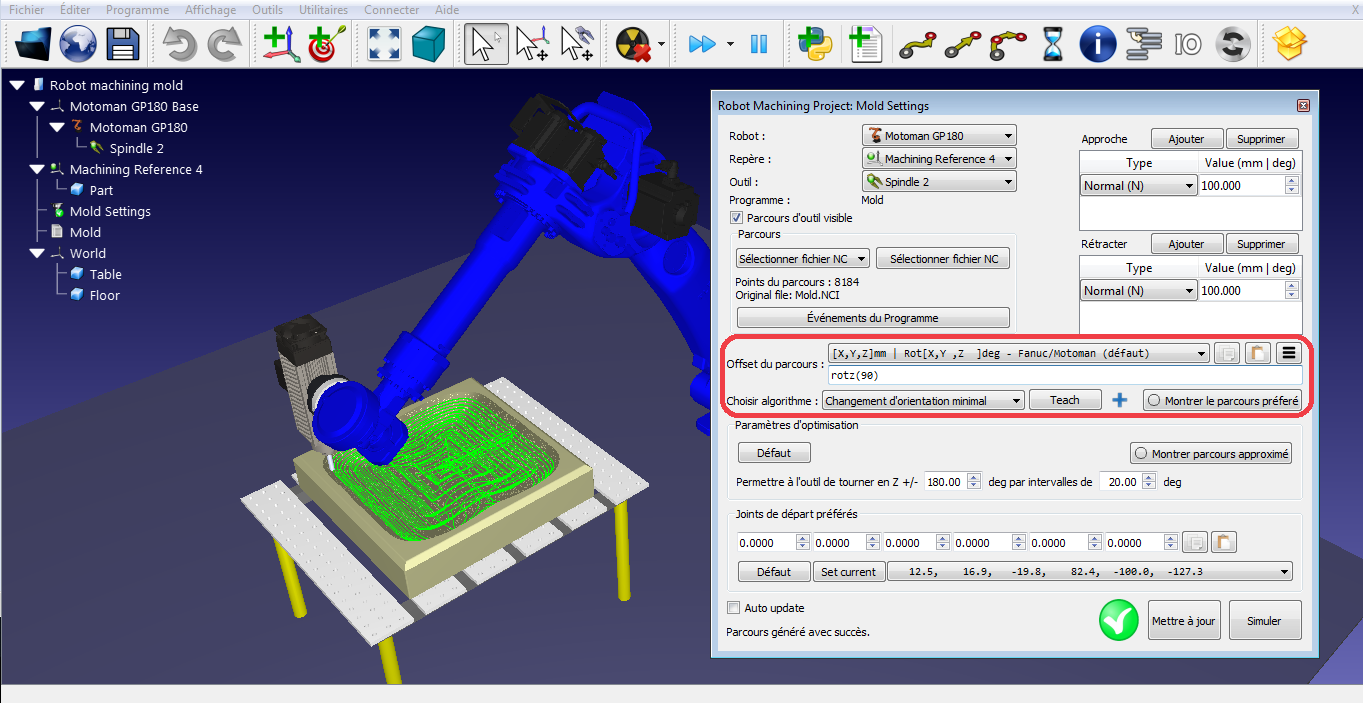
9.Modifier l’orientation de l’outil le long du parcours si nécessaire.
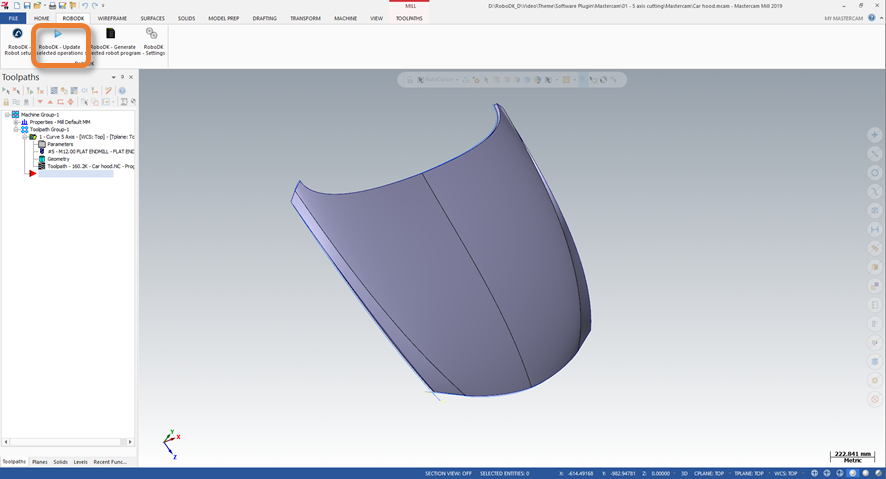
Robot de découpe 5 axes
Cet exemple montre comment créer un projet de découpe robot 5 axes en utilisant le plugin Mastercam.
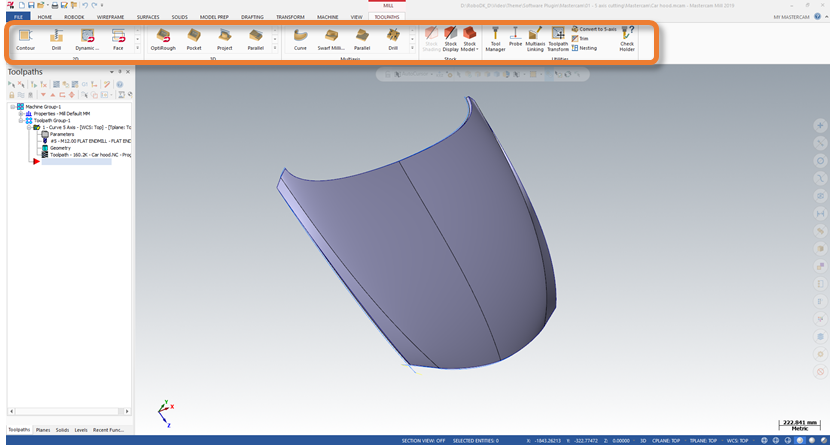
1.Charger la pièce dans Mastercam.
2.Créer le parcours outil en utilisant Mastercam Mill tools (outils de fraisage).
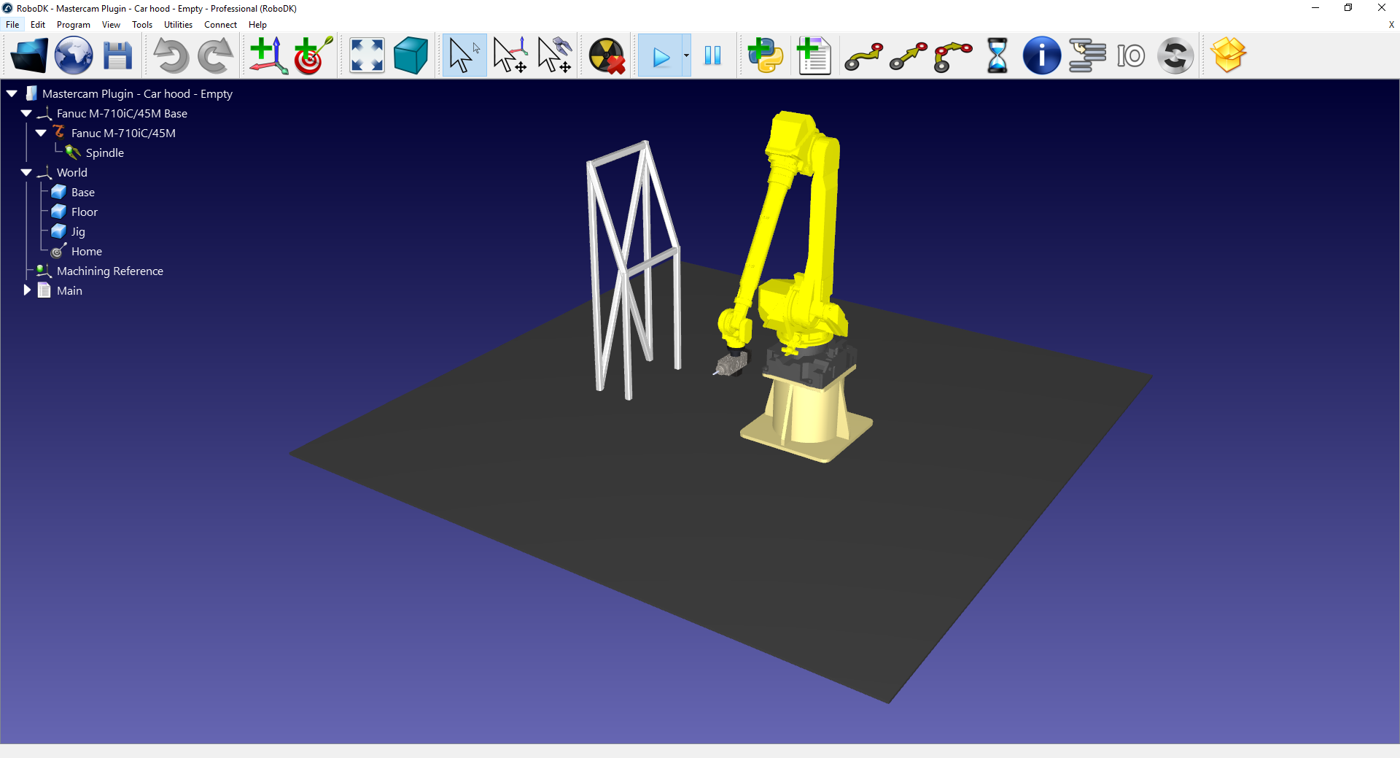
3.Créer une station dans RoboDK avec votre robot, votre broche et tout autres objets nécessaire.
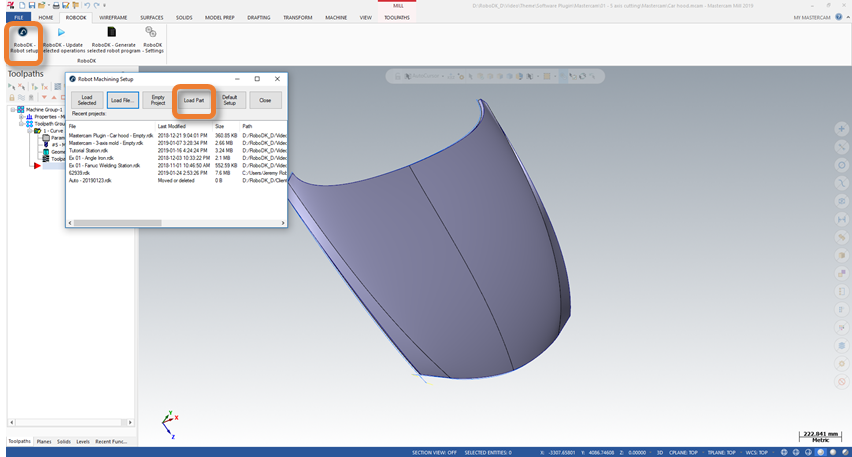
4.Dans le ruban du plugin RoboDK, sélectionner RoboDK ➔ Robot setup.
5.Dans la fenêtre de Paramètres d’Usinage Robot (Robot Machining Setup), sélectionner Load Part.
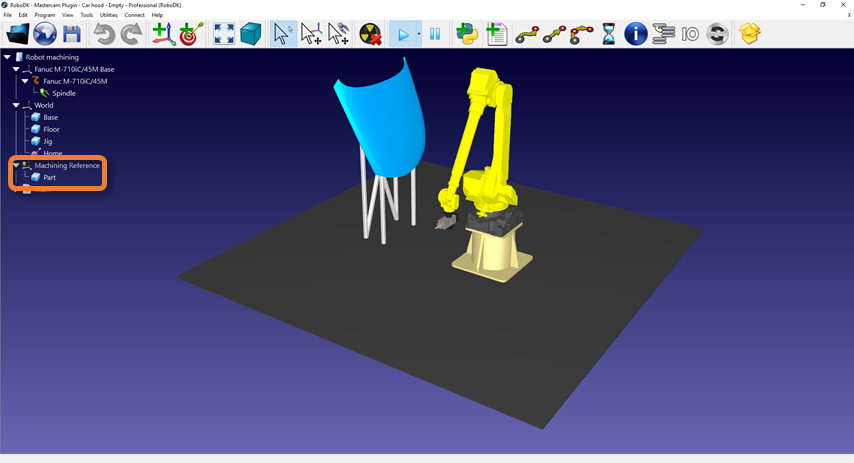
6.Dans RoboDK, ajuster la position du repère Machining Reference si nécessaire.
7.Dans le ruban du plugin RoboDK, sélectionner RoboDK ➔ Update selected operations.
8.Dans RoboDK, sélectionner Mettre à jour et Simuler dans la fenêtre du Robot Machining Project.
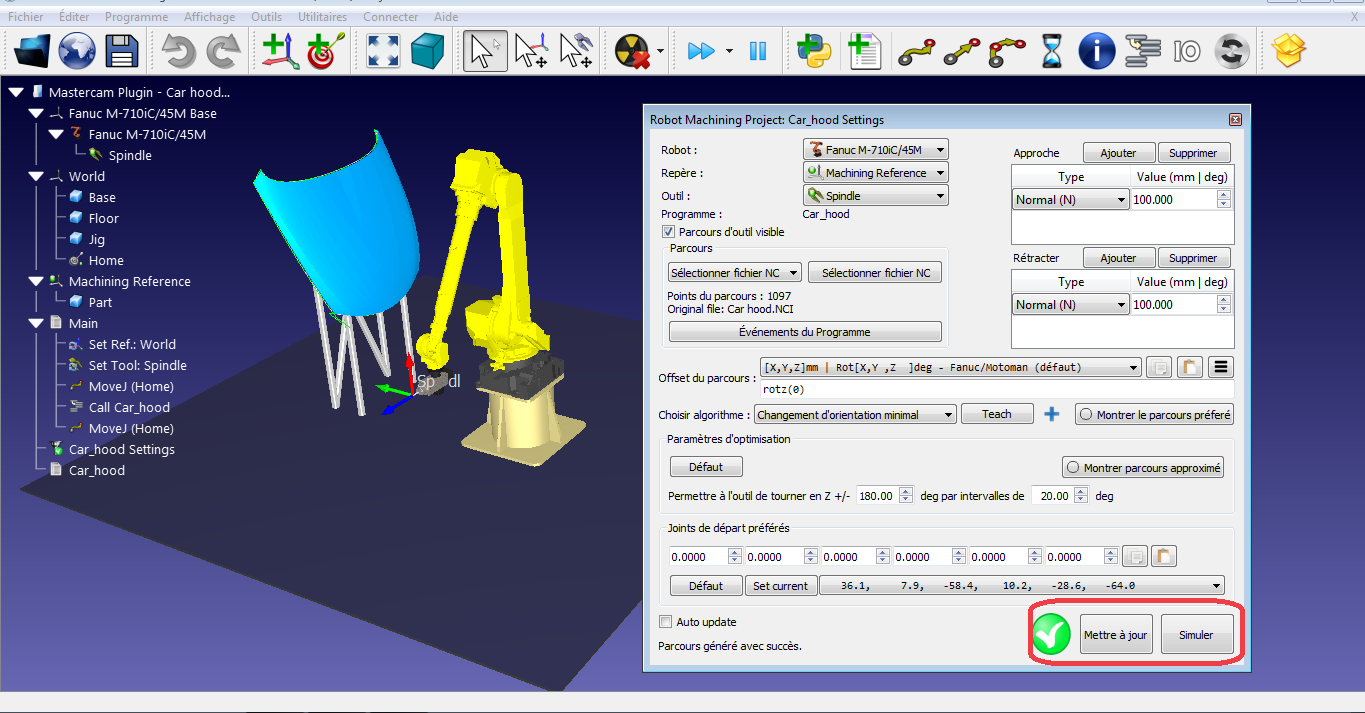
9.Modifier l’orientation de l’outil le long du parcours si nécessaire.