Mettre à jour les opérations sélectionnées
Sélectionner Update selected operations
Cette action tentera d’obtenir le programme d’usinage robot pour les opérations sélectionnées. Un crochet vert s’affiche si le programme est réalisable avec le robot sélectionné. S’il y a des problèmes (comme des singularités, des limites d’axe ou des problèmes de portée), un repère rouge s’affiche.
Double-cliquer sur le projet d’usinage robot
Faire un clic droit sur un programme et sélectionner Exécuter pour le simuler (ou double-cliquer sur le programme). Il est possible également de sélectionner Générer programme robot (F6) pour obtenir le programme de robot qui doit être chargé sur le contrôleur de robot. Plus d’informations sur la façon de générer des programmes de robots sont disponibles dans la section Programmation hors ligne.
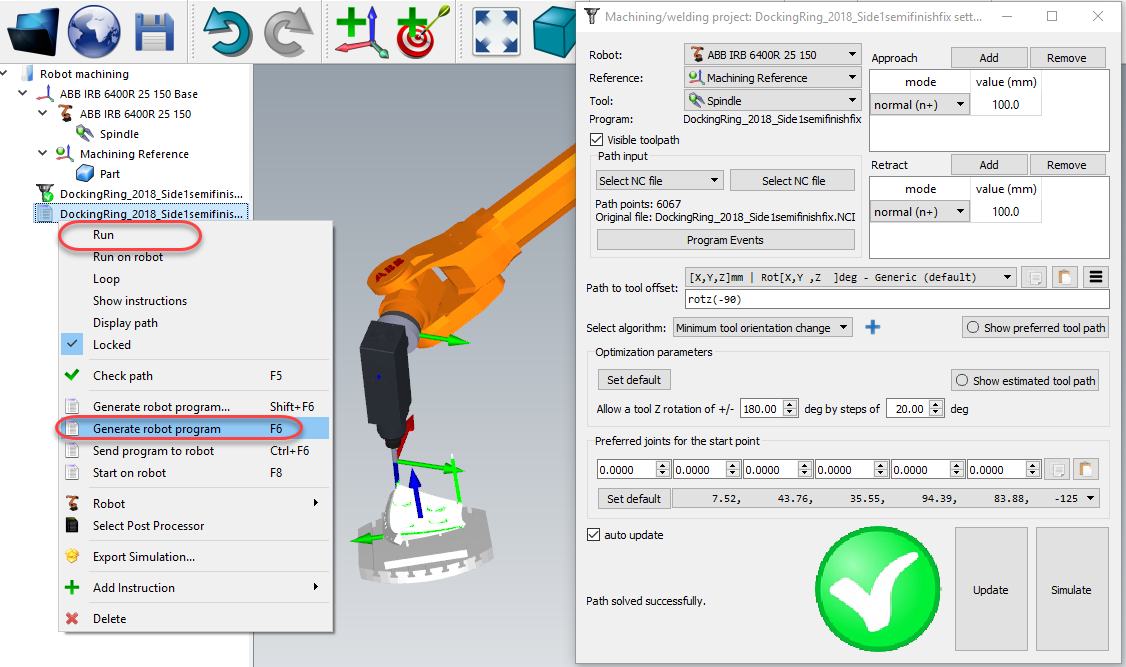
Si vous le souhaitez, faire un clic droit sur un programme et sélectionner Sélectionner le Post Processeur pour changer le post-processeur. Plus d’informations sur les post-processeurs disponibles dans la section post-processeurs.