Paramétrage Robot
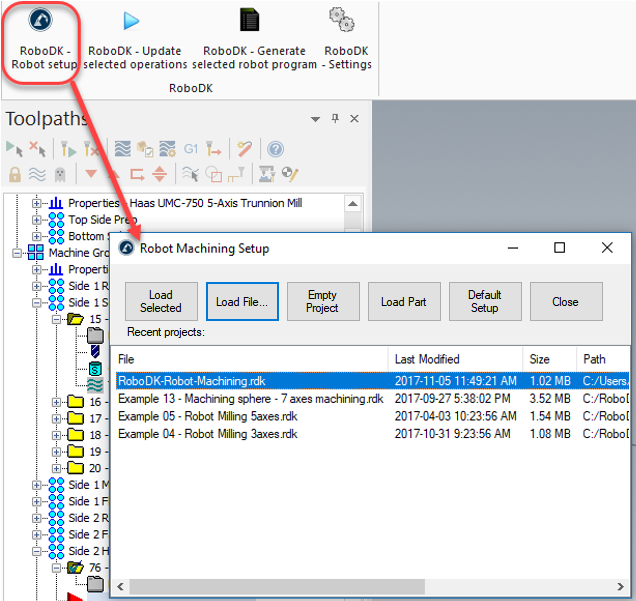
Le bouton Robot setup
●Load Selected : Charger un projet existant dans RoboDK (RDK file)
●Load File… : Sélectionner un fichier à ouvrir avec RoboDK et utiliser le comme projet par défaut avec le projet ouvert dans Mastercam.
●Empty Project : Ouvrir RoboDK avec un nouvel écran vide pour permettre à l’utilisateur de créer une nouvelle configuration. Plus d’informations pour mettre en place un nouveau projet à partir de zéro disponibles dans la section Démarrer
●Load Part : Charger la pièce de Mastercam à RoboDK (la pièce sera sauvegardée sous forme de fichier STL et chargée automatiquement).
●Default Setup : Configurer une nouvelle station avec un robot, une broche et un repère par défaut. La pièce sera également automatiquement exportée vers RoboDK
Pour plus d’information à propos de la conception d’un nouveau projet visiter la section usinage par robot .
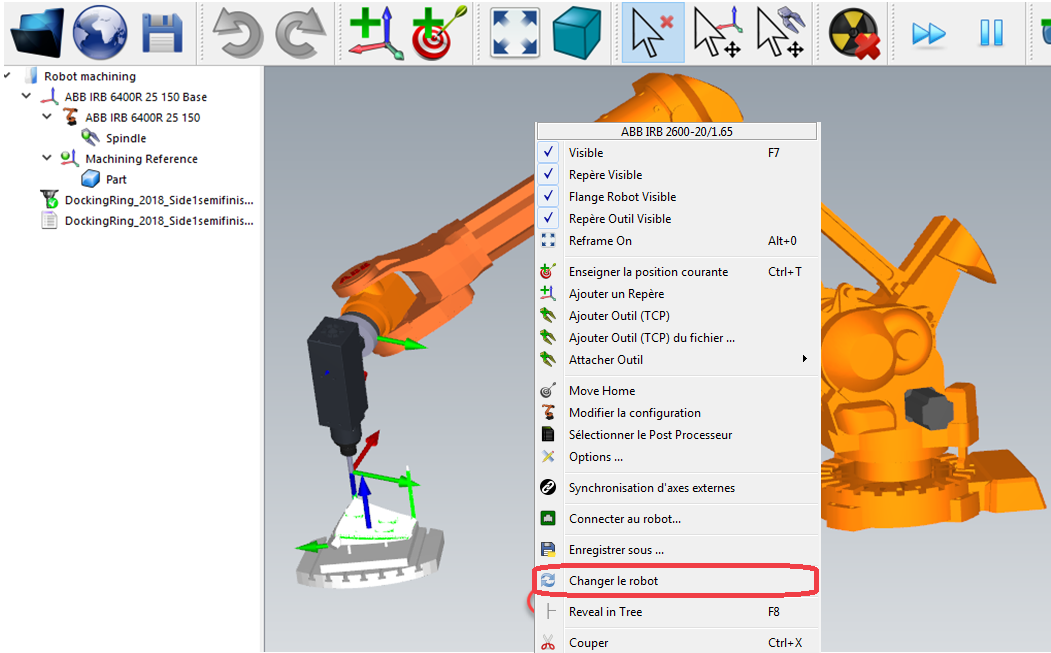
Il est également possible de changer le robot, de modifier l’outil et/ou le repère. Par exemple, suivre ces étapes pour changer le robot
1.Faire un clic droit sur le robot
2.Sélectionner Changer le robot (tel que montré dans l’image)
3.Sélectionner le nouveau robot
L’installateur RoboDK ne fournit que quelques robots par défaut, cependant, il est possible de télécharger plus de robots à partir de la bibliothèque en ligne.
Plus d’information à propos de l’ajout d’un outil robot disponible dans la Section de démarrage.
Enregistrer le projet pour conserver les changements en sélectionnant Fichier➔Enregistrer Station (Ctrl+S).