Plugin Settings
Sélectionner RoboDK Settings 
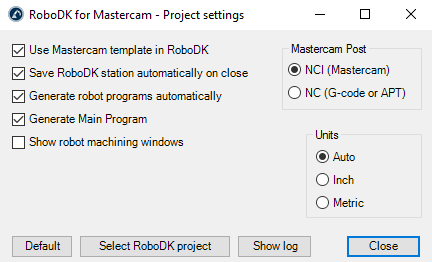
Il est possible de modifier les options suivantes :
1.Utiliser le modèle Mastercam au lieu du modèle RoboDK (les modèles de navigation 3D et de couleur dans RoboDK correspondront au style Mastercam).
2.Enregistrer la station RoboDK automatiquement lorsque RoboDK est fermé.
3.Créer un programme principal pour les projets comportant plus d’un programme.
4.Utiliser des fichiers NC (comme APT ou G-code) au lieu de fichiers NCI. RoboDK peut lire les fichiers suivants pour générer des programmes de robots :
a.NCI : Parcours outil natif pour Mastercam.
b.Fichier G-code (requière d’avoir un post processeur utilisant 5 axes).
c.Fichier APT (requière un post processeur).
5.Sélectionner le projet actif. Il est possible de spécifier un projet RoboDK par défaut (fichier RDK) pour afficher automatiquement des simulations ou générer des programmes de robot.